Электромагнитный акустический преобразователь - Electromagnetic acoustic transducer
Электромагнитный акустический преобразователь (EMAT) это преобразователь для бесконтактной генерации и приема акустических волн в проводящих материалах. Его действие основано на электромагнитный механизмы, не нуждающиеся в непосредственном соединении с поверхностью материала. Благодаря отсутствию контактирующего вещества, ЭМАП особенно полезны в суровых, то есть горячих, холодных, чистых или сухих условиях. ЭМАП подходят для генерации всех видов волн в металлических и / или магнитострикционный материалы. В зависимости от конструкции и ориентации катушек и магнитов, режим объемных поперечных горизонтальных (SH) волн (нормальный луч или угловой луч), поверхностная волна, пластинчатые волны, такие как SH и Волны ягненка, и всевозможные другие объемные и волноводные моды могут быть возбуждены.[1][2][3] После десятилетий исследований и разработок EMAT нашел свое применение во многих отраслях промышленности, таких как производство и обработка первичного металла, автомобилестроение, железная дорога, трубопроводы, котел и сосуд под давлением отрасли, [3] в которых они обычно используются для неразрушающий контроль (НК) металлических конструкций.
Основные компоненты
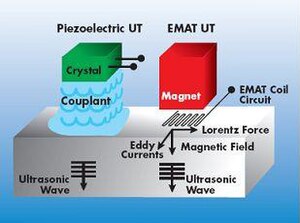
В преобразователе EMAT есть два основных компонента. Один - магнит, а другой - электрическая катушка. Магнит может быть постоянный магнит или электромагнит, который создает статическое или квазистатическое магнитное поле. В терминологии EMAT это поле называется магнитным полем смещения. Электрическая катушка приводится в движение переменный ток (AC) электрический сигнал на ультразвуковой частота, обычно в диапазоне от 20 кГц до 10 МГц. В зависимости от потребностей приложения сигнал может быть непрерывной волной, импульсным импульсом или тональным пакетом. Электрическая катушка с переменным током также генерирует переменное магнитное поле. Когда исследуемый материал находится близко к ЭМАП, в исследуемом материале генерируются ультразвуковые волны за счет взаимодействия двух магнитных полей.
Механизм трансдукции
Есть два механизма генерации волн за счет взаимодействия магнитного поля. Один Сила Лоренца когда материал является проводящим. Другой - магнитострикция, когда материал ферромагнитен.
Сила Лоренца
Переменный ток в электрической катушке генерирует вихревой ток на поверхности материала. Согласно теории электромагнитной индукции, вихревой ток распространяется только на очень тонкий слой материала, называемый глубиной скин-слоя. Эта глубина уменьшается с увеличением частоты переменного тока, проводимости и проницаемости материала. Обычно для возбуждения переменного тока с частотой 1 МГц глубина скин-слоя составляет лишь доли миллиметра для таких первичных металлов, как сталь, медь и алюминий. Вихревой ток в магнитном поле испытывает Сила Лоренца. В микроскопическом представлении сила Лоренца применяется к электронам в вихревом токе. С макроскопической точки зрения сила Лоренца применяется к поверхностной области материала из-за взаимодействия между электронами и атомами. Распределение силы Лоренца в первую очередь контролируется конструкцией магнита и конструкцией электрической катушки и зависит от свойств испытуемого материала, относительного положения между датчиком и испытуемой деталью и сигнала возбуждения для датчика. Пространственное распределение силы Лоренца определяет точную природу упругих возмущений и то, как они распространяются от источника. Большинство успешных приложений EMAT основано на механизме силы Лоренца.[4]
Магнитострикция
Ферромагнитный материал будет иметь изменение размеров при приложении внешнего магнитного поля. Этот эффект называется магнитострикция. Магнитное поле магнита расширяется или сжимается в зависимости от расположения ферромагнитного материала, имеющего индуцирующее напряжение в катушке, и на величину изменения влияют величина и направление поля.[5] Переменный ток в электрической катушке индуцирует переменное магнитное поле и, таким образом, вызывает магнитострикцию на ультразвуковой частоте в материале. Возмущения, вызванные магнитострикцией, затем распространяются в материале в виде ультразвуковой волны.
В поликристаллическом материале магнитострикционный отклик очень сложен. На него влияют направление поля смещения, направление поля от электрической катушки переменного тока, сила поля смещения и амплитуда переменного тока. В некоторых случаях может наблюдаться один или два пика отклика при увеличении поля смещения. В некоторых случаях отклик можно значительно улучшить за счет изменения относительного направления между магнитным полем смещения и магнитным полем переменного тока. Количественно магнитострикция может быть описана в математическом формате, аналогичном пьезоэлектрическим постоянным.[5] Эмпирически требуется большой опыт, чтобы полностью понять явление магнитострикции.
Эффект магнитострикции использовался для генерации волн как SH-типа, так и типа Лэмба в стальных изделиях. В последнее время из-за более сильного магнитострикционного эффекта в никеле, чем в стали, для неразрушающего контроля стальных изделий были разработаны магнитострикционные датчики с использованием никелевых накладок.
Сравнение с пьезоэлектрическими преобразователями
Как метод ультразвукового контроля (UT), EMAT имеет все преимущества UT по сравнению с другими методами неразрушающего контроля. Так же, как пьезоэлектрические зонды UT, зонды EMAT могут использоваться в конфигурациях с импульсным эхом, с фиксацией основного тона и сквозной передачей. Зонды EMAT также могут быть собраны в зонды с фазированной решеткой, обеспечивающие фокусировку и управление лучом.[6]
Преимущества
По сравнению с пьезоэлектрическими преобразователями, датчики ЭМАП имеют следующие преимущества:
- Связующее вещество не требуется. Основываясь на механизме трансдукции EMAT, связующее вещество не требуется. Это делает EMAT идеальным для проверок при температурах ниже точки замерзания и выше точки испарения жидких связующих. Это также делает его удобным в ситуациях, когда обработка связующего вещества нецелесообразна.
- EMAT - это бесконтактный метод. Хотя близость предпочтительна, физический контакт между датчиком и испытуемым образцом не требуется.
- Сухой осмотр. Поскольку связующее вещество не требуется, ЭМАП-контроль можно проводить в сухой среде.
- Менее чувствителен к состоянию поверхности. В контактных пьезоэлектрических преобразователях испытательная поверхность должна быть гладко обработана для обеспечения сцепления. При использовании EMAT требования к гладкости поверхности менее жесткие; единственное требование - удалить рыхлую окалину и тому подобное.
- Легче развертывать датчик. При использовании пьезоэлектрического преобразователя угол распространения волны в тестовой части зависит от Закон Снеллиуса. В результате небольшое изменение в размещении датчика может вызвать значительное изменение угла преломления.
- Легче генерировать волны SH-типа. При использовании пьезоэлектрических преобразователей SH-волна трудно передать на испытуемую деталь. EMAT представляет собой удобное средство генерации объемных SH-волн и волноводных SH-волн.
Проблемы и недостатки
Недостатки ЭМАП по сравнению с пьезоэлектрическим УЗИ можно резюмировать следующим образом:
- Низкая эффективность трансдукции. Преобразователи EMAT обычно выдают необработанный сигнал меньшей мощности, чем пьезоэлектрические преобразователи. В результате необходимы более сложные методы обработки сигналов, чтобы изолировать сигнал от шума.
- Ограничено металлическими или магнитными изделиями. NDT пластика и керамики не подходит или, по крайней мере, неудобно с использованием EMAT.
- Ограничения по размеру. Хотя есть преобразователи EMAT размером с пенни, обычно используемые преобразователи имеют большие размеры. Низкопрофильные проблемы EMAT все еще находятся в стадии исследования и разработки. Из-за ограничений по размеру фазированную решетку ЭМАП также сложно изготовить из очень маленьких элементов.
- Следует соблюдать осторожность при обращении с магнитами вокруг стальных изделий.
Приложения
EMAT использовался в широком диапазоне приложений и может быть использован во многих других. Ниже приводится краткий и неполный список.
- Измерение толщины для различных применений[7]
- Дефектоскопия стальных изделий
- Проверка дефектов ламинации пластин
- Обнаружение расслоения клееной конструкции[8][9]
- Лазер проверка сварного шва для автомобильных компонентов
- Контроль сварных швов для соединения змеевиков, труб и труб[10]
- Осмотр трубопровода в процессе эксплуатации[11][12]
- Железнодорожный рельс и осмотр колес
- Контроль аустенитных сварных швов для энергетики[6]
- Характеристика материала[13][14]
В дополнение к вышеупомянутым приложениям, которые подпадают под категорию неразрушающий контроль, EMAT использовались в исследованиях для ультразвуковая связь, где они генерируют и принимают акустический сигнал в металлической конструкции.[15] Ультразвуковая связь особенно полезна в областях, где нельзя использовать радиочастоты. Это включает в себя подводную и подземную среду, а также герметичную среду, например, связь с датчиком внутри резервуара высокого давления.
Рекомендации
- ^ Р. Б. Томпсон, Физические принципы измерений с датчиками ЭМАП,Ультразвуковые методы измерения, физическая акустика Том XIX, Отредактировал Р. Терстон и Аллан Д. Пирс, Academic Press, 1990
- ^ B.W. Максфилд, А. Курамото, Дж.К. Хулберт, Оценка проектов EMAT для избранных приложений, Mater. Eval., Том 45, 1987, стр. 1166
- ^ а б Innerspec Technologies
- ^ B.W. Максфилд и З. Ван, 2018 г., Электромагнитные акустические преобразователи для неразрушающей оценки, в Справочнике ASM, том 17: Неразрушающий контроль материалов, изд. А. Ахмад и Л. Дж. Бонд, ASM International, Materials Park, OH, стр. 214–237.
- ^ а б Масахико Хирао и Хироцугу Оги, EMATS для науки и промышленности, Kluwer Academic Publishers, 2003 г.
- ^ а б Гао, Х. и Б. Лопес, "Разработка одноканальных ЭМАП и ЭМАП с фазированной решеткой для контроля аустенитных сварных швов", Оценка материалов (ME), Vol. 68 (7), 821-827, (2010).
- ^ М. Гори, С. Джамбони, Э. Д'Алессио, С. Гиа и Ф. Чернуски, «Преобразователи EMAT и определение толщины старых котельных труб», Ultrasonics 34 (1996) 339-342.
- ^ С. Диксон, С. Эдвардс и С. Б. Палмер, «Анализ адгезионных связей с использованием электромагнитных акустических преобразователей», Ultrasonics Vol. 32 № 6, 1994.
- ^ Х. Гао, С. М. Али и Б. Лопес, «Эффективное обнаружение расслоения в многослойных структурах с использованием ультразвуковых волноводных ЭМАП» в NDT & E International Vol. 43 июня 2010 г., стр: 316-322.
- ^ Х. Гао, Б. Лопес, С.М. Али, Дж. Флора и Дж. Монкс (Innerspec Technologies), «Поточные испытания трубок для ВПВ с использованием ультразвуковых волноводных ЭМАП» на 16-м Конгрессе США по теоретической и прикладной механике (USNCTAM2010-384), Государственный колледж, Пенсильвания, США, 27 июня - 2 июля 2010 г.
- ^ М. Хирао и Х Оги, «Методика EMAT с SH-волнами для инспекции газопроводов», NDT & E International 32 (1999) 127-132
- ^ Стефан Сенсон, «Инспекция трубопроводов: принципы и методы», Под ред. Лавуазье 2007 »
- ^ Х. Оги, Х. Ледбеттер, С. Ким и М. Хирао, "Бесконтактная мод-селективная резонансная ультразвуковая спектроскопия: Электромагнитно-акустический резонанс", Journal of the ASA, vol. 106, стр. 660-665, 1999.
- ^ М. П. да Кунья и Дж. У. Джордан, "Улучшенный продольный преобразователь ЭМАП для упругой постоянной экстракции", в Proc. IEEE Inter. Freq. Contr. Symp, 2005, стр. 426-432.
- ^ X. Хуанг, Дж. Сани, С. Бахтиари и А. Хейфец, «Проектирование системы ультразвуковой связи с использованием электромагнитного акустического преобразователя», на Международном симпозиуме по ультразвуковому оборудованию (IUS) 2018 г., IEEE, 2018, стр. 1–4.
Нормы и стандарты
- Стандартное руководство ASTM E1774-96 для электромагнитных акустических преобразователей (EMAT)
- ASTM E1816-96 Стандартная практика ультразвуковых исследований с использованием технологии электромагнитных акустических преобразователей (EMAT)
- ASTM E1962-98 Стандартные методы испытаний для ультразвуковых исследований поверхности с использованием технологии электромагнитных акустических преобразователей (EMAT)