Обнаружение пешеходов - Pedestrian detection
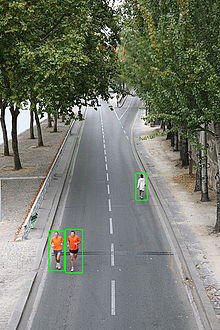

Обнаружение пешеходов является важной и важной задачей любого интеллектуального видеонаблюдение системы, поскольку она предоставляет основную информацию для семантический понимание видео кадры. Он имеет очевидное расширение для автомобильных приложений из-за возможности улучшения систем безопасности. Многие производители автомобилей (например, Volvo, Ford, GM, Nissan) предлагают это в качестве ADAS вариант в 2017 году.
Вызовы
- Различный стиль одежды во внешнем виде
- Различные возможные артикуляции
- Наличие окклюзионных аксессуаров
- Частые заторы между пешеходами
Существующие подходы
Несмотря на проблемы, обнаружение пешеходов по-прежнему остается активной областью исследований в компьютерное зрение в былые времена. Было предложено множество подходов.
Целостное обнаружение
Детекторы обучены искать пешеходов в кадре видео путем сканирования всего кадра. Детектор «сработает», если элементы изображения в окне локального поиска соответствуют определенным критериям. Некоторые методы используют глобальные функции, такие как шаблон края,[1] другие используют локальные функции, такие как гистограмма ориентированных градиентов [2] дескрипторы. Недостатком этого подхода является то, что на производительность может легко повлиять фоновый беспорядок и заглушки.
Детектирование на основе деталей
Пешеходы моделируются как совокупность частей. Гипотезы детали сначала генерируются путем изучения локальных функций, в том числе Edgelet[3] и особенности ориентации.[4] Затем эти частичные гипотезы объединяются, чтобы сформировать лучший набор существующих пешеходных гипотез. Хотя этот подход привлекателен, обнаружение деталей само по себе является сложной задачей. Реализация этого подхода следует стандартной процедуре обработки данных изображения, которая состоит из первого создания пирамиды изображений с плотной дискретизацией, вычисления функций в каждом масштабе, выполнения классификации во всех возможных местах и, наконец, выполнения немаксимального подавления для создания окончательного набора ограничивающие рамки.[5]
Обнаружение на основе патчей
В 2005 году Leibe et al.[6] предложил подход, сочетающий как обнаружение, так и сегментация с именем неявная модель формы (ISM). В процессе обучения изучается кодовая книга местного происхождения. В процессе обнаружения извлеченные локальные особенности используются для сопоставления с записями кодовой книги, и каждое сопоставление дает один голос за гипотезы пешехода. Окончательные результаты обнаружения могут быть получены путем дальнейшего уточнения этих гипотез. Преимущество этого подхода в том, что требуется лишь небольшое количество обучающих изображений.
Обнаружение движения
Когда позволяют условия (фиксированная камера, стационарное освещение и т. Д.), вычитание фона может помочь обнаружить пешеходов. Вычитание фона классифицирует пиксели видеопотоков либо как фон, где движение не обнаруживается, либо как передний план, где движение обнаруживается. Эта процедура выделяет силуэты (связанные компоненты на переднем плане) каждого движущегося элемента сцены, включая людей. Разработан алгоритм,[7][8] на Льежский университет, чтобы проанализировать форму этих силуэтов, чтобы обнаружить людей. Поскольку методы, которые рассматривают силуэт в целом и выполняют единую классификацию, в целом очень чувствительны к дефектам формы, для уменьшения влияния дефектов был предложен частичный метод разделения силуэтов на набор меньших участков. В отличие от других подходов на основе частей, эти области не имеют никакого анатомического значения. Этот алгоритм был расширен до обнаружения людей в 3D-видеопотоках.[9]
Обнаружение с использованием нескольких камер
Fleuret et al.[10] предложил метод интеграции нескольких откалиброванных камер для обнаружения нескольких пешеходов. При таком подходе заземляющая плоскость делится на однородные, неперекрывающиеся ячейки сетки, обычно размером 25 на 25 (см). Детектор создает карту вероятности занятости (POM), которая обеспечивает оценку вероятности того, что каждая ячейка сетки будет занята человеком. Учитывая от двух до четырех синхронизированных видеопотоков, снятых на уровне глаз и под разными углами, этот метод может эффективно комбинировать генеративную модель с динамическим программированием для точного отслеживания до шести человек в тысячах кадров, несмотря на значительные окклюзии и изменения освещения. Он также может вывести метрически точные траектории для каждой из них.
Родственная плодотворная работа
Смотрите также
Рекомендации
- ^ К. Папагеоргиу и Т. Поджио, "Обучаемая система обнаружения пешеходов", Международный журнал компьютерного зрения (IJCV), страницы 1: 15–33, 2000
- ^ Н. Далал, Б. Триггс, «Гистограммы ориентированных градиентов для обнаружения человека», IEEE Computer Society Конференция по компьютерному зрению и распознаванию образов (CVPR), страницы 1: 886–893, 2005 г.
- ^ Бо Ву и Рам Неватия, "Обнаружение множества людей с частичной окклюзией на одном изображении с помощью байесовской комбинации детекторов эджлетных частей", Международная конференция IEEE по компьютерному зрению (ICCV), страницы 1: 90–97, 2005 г.
- ^ Миколайчик К., Шмид К. и Зиссерман А. «Обнаружение человека на основе вероятностной сборки надежных детекторов деталей», Европейская конференция по компьютерному зрению (ECCV), том 3021/2004, страницы 69–82, 2005 г.
- ^ Хёнги Чо, Пол Э. Рыбски, Аарон Бар-Хиллель и Венде Чжан «Обнаружение пешеходов в реальном времени с помощью моделей деформируемых частей»
- ^ Б. Лейбе, Э. Земанн и Б. Шиле. «Обнаружение пешеходов в местах массового скопления людей» Конференция IEEE по компьютерному зрению и распознаванию образов(CVPR), страницы 1: 878–885, 2005 г.
- ^ О. Барнич, С. Йодонь и М. Ван Дроогенбрук. «Надежный анализ силуэтов по морфологическому распределению размеров» Передовые концепции интеллектуальных систем технического зрения(ACIVS), страницы 734–745, 2006 г.
- ^ С. Пьерар, А. Лежен и М. Ван Дроогенбрук. «Вероятностный пиксельный подход для обнаружения людей в видеопотоках» Международная конференция IEEE по акустике, обработке речи и сигналов(ICASSP), страницы 921–924, 2011 г.
- ^ С. Пьерар, А. Лежен и М. Ван Дроогенбрук. «3D-информация важна для обнаружения людей в видеопотоках» Труды 3D Stereo MEDIA, страницы 1–4, 2010 г.
- ^ Флёре, Дж. Беркла, Р. Ленгань и П. Фуа, Многокамерное отслеживание людей с помощью вероятностной карты занятости, IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 30, № 2. С. 267–282, февраль 2008 г.
внешняя ссылка
- Код для POM - Обнаружение пешеходов с нескольких камер с использованием вероятностной карты занятости
- Система обнаружения пешеходов для тяжелой техники - Пример системы обнаружения пешеходов
- Система обнаружения пешеходов Blaxtair для мобильной станции