| Похоже, что один из основных авторов этой статьи тесная связь со своим предметом. Может потребоваться очистка для соответствия политике содержания Википедии, в частности нейтральная точка зрения. Пожалуйста, обсудите подробнее страница обсуждения. (Январь 2017 г.) (Узнайте, как и когда удалить этот шаблон сообщения) |
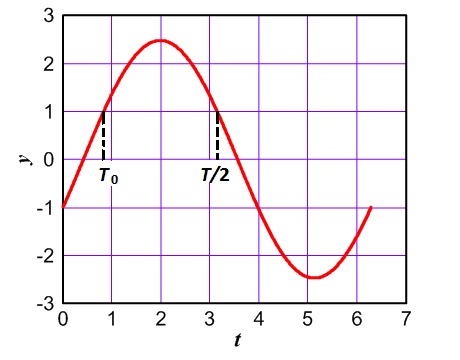
Синусоидальные колебания F = 0.01
В Уравнение Бирюкова (или же Осциллятор Бирюкова), названная в честь Вадима Бирюкова (1946), является нелинейным дифференциальное уравнение используется для модели с демпфированием генераторы.[1]
Уравнение имеет вид

куда ƒ(у) - кусочно-постоянная функция, положительная, за исключением малых у так как


Уравнение (1) является частным случаем Уравнение Лиенара; он описывает автоколебания.
Решение (1) через отдельные промежутки времени, когда f (y) постоянна, имеет вид[2]

Здесь  , в
, в  и
и  иначе. Выражение (2) можно использовать для действительных и комплексных значений
иначе. Выражение (2) можно использовать для действительных и комплексных значений  .
.
Решение первого полупериода при  является
является

Релаксационные колебания F = 4



Решение второго полупериода:

Решение содержит четыре константы интегрирования  ,
,  ,
,  ,
,  , Период
, Период  и граница
и граница  между
между  и
и  нужно найти. Граничное условие выводится из непрерывности
нужно найти. Граничное условие выводится из непрерывности  ) и
) и  .[3]
.[3]
Таким образом, решение (1) в стационарном режиме получается путем решения системы алгебраических уравнений в виде
 ;
;  ;
;  ;
;  ;
; ;
; .
.
Константы интегрирования получаются Алгоритм Левенберга-Марквардта. С участием  ,
,  , Уравнение (1) названный Генератор Ван дер Поля. Ее решение нельзя выразить элементарными функциями в замкнутой форме.
, Уравнение (1) названный Генератор Ван дер Поля. Ее решение нельзя выразить элементарными функциями в замкнутой форме.
Рекомендации
- ^ Х. П. Гэвин, Метод Левенберга-Марквардта для нелинейных задач аппроксимации кривой наименьших квадратов (включая реализацию MATLAB)
- ^ Эроусмит Д. К., Плейс С. М. Динамические системы. Дифференциальные уравнения, карты и хаотическое поведение. Чепмен и Холл (1992)
- ^ Пилипенко А. М., Бирюков В. Н. «Исследование современных методов численного анализа эффективности автоколебательных схем», Радиоэлектроника, № 9, (2013). http://jre.cplire.ru/jre/aug13/9/text-engl.html

