Шкив дифференциала - Differential pulley

А шкив дифференциала, также называемый «дифференциальный шкив Вестона», иногда «цепная таль» или в просторечии «цепное падение», используется для ручного подъема очень тяжелых предметов, таких как автомобильные двигатели. Он приводится в действие путем натягивания на провисшую часть непрерывной цепи, которая наматывается на шкивы. Относительный размер двух соединенных шкивов определяет максимальный вес, который можно поднять вручную. Если радиусы шкивов достаточно близки, нагрузка останется на месте (и не опустится под действием силы сила тяжести ), пока цепь не будет натянута.[1]
История
Дифференциальный шкив был изобретен в 1854 году Томасом Олдриджем Вестоном из Кингс Нортон, Англия.[2]
Шкивы были изготовлены в сотрудничестве с Ричард и Джордж Танье. Согласно с Ричард Танье автобиографии, шкив дифференциала Weston эволюционировал из Китайский брашпиль, с бесконечной цепью, заменяющей веревку конечной длины. Он утверждал, что многие инженерные фирмы признали сложность эффективного отсоединения цепи от зубьев при вращении шкивов, но его фирма разработала «шаговую» цепь, которая решила эту проблему. Продаваемый как «Блоки дифференциального шкива Weston с патентованными направляющими цепи», шкив имел хорошие продажи, а именно 3000 комплектов за 9 месяцев. На выставке он был представлен в 5 размерах - от 10 центнеров (510 кг) до 3 тонн (3000 кг). 1862 Международная выставка в Лондон и получил медаль "За оригинальное применение, практическую полезность и успех".
An торговец скобяными изделиями оспаривал Tangyes, что шкив использовался в течение 30 лет до патента Вестона, но судья, Уильям Пейдж Вуд вынес решение в пользу Танджи, поскольку механизм взаимодействия существенно отличался от того, который был представлен в качестве доказательства.[3]
В Компания Yale Lock приобрел патентные права в 1876 г.[2]
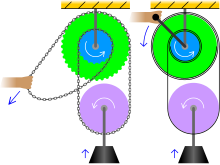
Тупой шкив может поднять очень большие массы небольшое расстояние. Он состоит из двух фиксированных шкивы неравных радиусов, которые прикреплены друг к другу и вращаются вместе, единственный шкив, несущий нагрузку, и бесконечный трос, обмотанный вокруг шкивов. Чтобы избежать проскальзывания, веревку обычно заменяют цепью, а соединенные шкивы - на звездочки.
Две части цепи, несущие один шкив, действуют противоположно и неравно крутящие моменты на подключенных шкивах так, чтобы только разница эти моменты необходимо компенсировать вручную, потянув за незакрепленную часть цепи. механическое преимущество: сила, необходимая для подъема груза, составляет лишь часть масса. При этом расстояние, на которое поднимается груз, меньше, чем длина тянущейся цепи во столько же раз. Этот фактор (механическое преимущество MA) зависит от относительной разности радиусов р и р подключенных шкивов:

Влияние на силы и расстояния (см. Рисунок) количественно:

Разница в радиусах может быть очень маленькой, что делает механическое преимущество этой системы шкивов очень большим.[4][5]В крайнем случае нулевой разницы радиусов MA становится бесконечным, поэтому для перемещения цепи не требуется никаких усилий (кроме трения), но перемещение цепи больше не будет поднимать груз.
С другой стороны, когда р равна нулю, система становится простой снасти с механическим преимуществом 2.
Тот же принцип используется в дифференциале лебедка, где соединенные шкивы заменены на лебедки.
Расчет механического преимущества
На приведенном выше рисунке четыре сегмента цепи обозначены буквами W, X, Y и Z. Величины соответствующих им сил равны FW, FИкс, FY и FZ, соответственно.
Предполагая, что цепь безмассовая, FИкс = 0, поскольку сегмент X не поддерживает вес.
Принимая систему в равновесии, FW и FY равны - в противном случае нижний шкив свободно вращался бы, пока они не были.
Затем сила, направленная вниз, действующая на нижний шкив, равна силам, действующим на него вверх, поэтому
- FL = FW + FY, или 2 FW потому что FW = FY.
Кроме того, нет никакой сети крутящий момент или момент вокруг составного шкива, поэтому крутящий момент по часовой стрелке равен крутящему моменту против часовой стрелки:
- FW р + FИкс р = FY р + FZ р .
Подстановка FИкс и FY из приведенных выше уравнений,
- FW р + 0 = FW р + FZ р .
Перестановка дает
- FW = FZ · р/р − р .
В качестве FW = F L/2,
- F L/2 = FZ · р/р − р .
Наконец, механическое преимущество, F L/F Z = 2 р/р − р или 2/1 − р/р .
____________________________________________________________________________________________________________________________________________
Гораздо более простой метод расчета механического преимущества может быть реализован путем простого подсчета и сравнения карманов звеньев цепи в двух звездочках разного размера. Назовем количество карманов в двух соответствующих звездочках P1 (большей) и P2 (меньшей).
При подъеме груза на каждый полный оборот двойной звездочки в сборе пары звеньев цепи P1 (альтернативные перпендикулярные звенья, помещаемые между карманами) будут приниматься большей звездочкой, в то время как пары звеньев цепи P2 освобождаются меньшей звездочкой. усиление пар звеньев цепи P1-P2.
Механическое преимущество равняется отношению пар звеньев цепи, необходимых для каждого оборота, к чистому выигрышу пар звеньев цепи. Другими словами, механическое преимущество будет заключаться в расстоянии тяги, необходимом для каждой единицы расстояния усиления. Механическое преимущество пары звездочек дифференциала равно P1 / (P1-P2).
Поскольку в нагрузке находится подвижный шкив, это удваивает механическое преимущество фиксированной (закрепленной) звездочки в сборе, что приводит к общему механическому преимуществу в 2 x P1 / (P1-P2).
Например, цепной привод с дифференциалом массой 1 тонна может иметь комплект звездочек с 15 и 14 карманами. Это обеспечило бы механическое преимущество в сумме 2 х 15 / (15-14) или 30: 1.
Смотрите также
Рекомендации
- ^ Маколей, Дэвид; Ардли, Нил (1998). Новый способ работы. Бостон, США: Компания Houghton Mifflin. п.56. ISBN 0-395-93847-3.
- ^ а б «Создатели истории». Журнал Hoist. Обзор мирового рынка. 3 февраля 2003 г.
- ^ Музей электростанции, Сидней, Австралия - 2003/45/1 Блок шкивов дифференциала, большие и малые шкивы, грузоподъемность 2 тонны (2,032 тонны), изобретен Т. А. Вестоном / изготовлен Tangyes Ltd, Бирмингем, Англия, 1860 - 1890 гг.
- ^ Блэк, Н. Генри; Дэвис, Харви Н. (1922). Практическая физика, фундаментальные принципы и приложения в повседневной жизни (2-е изд.). Нью-Йорк: Макмиллан. п.39.
- ^ Центр развития программы военно-морского образования и подготовки США (1994) [1965]. Основные машины и как они работают. Нью-Йорк: Dover Publications. С. 2–6. ISBN 9780486217093.