Мобильный робот Хепера - Khepera mobile robot

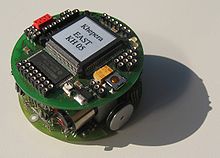
В Хепера маленький (5,5 см) дифференциал колесный мобильный робот который был разработан в лаборатории ЛАМИ проф. Жан-Даниэль Никуд в EPFL (Лозанна, Швейцария) в середине 90-х гг. Он был разработан Эдо. Франци, Франческо Мондада, Андре Гиньяр и другие.
Маленький, быстрый и построенный на базе Motorola 68331, он уже 10 лет служит исследователям и широко используется более чем 500 университетами.[нужна цитата ] Мировой.
Научное влияние
Хепера была продана тысячам исследовательских лабораторий и изображена на обложке 31 августа 2000 г. выпуск Природа.[1] Это снова появилось в статье 2003 года. [1].
Поиск ученых Google с хепера мобильные роботы возвращает 4800 обращений [2]. Хепера помогли в появлении эволюционная робототехника [3][4].
Технические детали
Оригинальная версия
- Диаметр: 55 мм
- Высота: 30 мм
- Масса пустого: 80 г
- Скорость: от 0,02 до 1,0 м / с
- Автономность: 45 минут в движении
- Motorola 68331 CPU @ 16 МГц
- 256 КБ баран
- 512 КБ EEPROM
- Бег µKOS ОСРВ
- 2 Щеточные серводвигатели постоянного тока с инкрементальные энкодеры
- 8 инфракрасный датчики приближения и внешней освещенности (SFH900)
2.0 Версия
- Процессор Motorola 68331 @ 25 МГц
- 512 КБ RAM
- 512 КБ флэш-памяти
- Улучшенные аккумуляторы и датчики
Версия 4
- Процессор ARM Cortex-A8 с тактовой частотой 800 МГц
- Вес: 540 г
- 256 МБ оперативной памяти
- 512 МБ плюс дополнительные 8 ГБ для данных
- Аккумулятор: литий-полимерный 7,4 В, 3400 мАч
Расширения
Для Khepera существует несколько дополнительных турелей, в том числе:
- Захват
- 1D или 2D камера, проводная или беспроводная
- Радиоизлучатель / приемник, низкая и высокая скорость
- I / 0
Рекомендации
- ^ связана со статьей Майкла Дж. Б. Кригера, Жана-Бернара Биллетера и Лорана Келлера.
- Примечания
- Мондада, Ф., Франци, Э., Гиньяр, А. (1999), Развитие Хеперы. В трудах Первого международного семинара Хепера, Падерборн, 10–11 декабря 1999 г. PDF BibTex EPFL Infoscience entry
внешняя ссылка
- Домашняя страница - K-Team, компания по продаже роботов Хепера.
- Интерфейс Хепера-Лисп (KHLI) - библиотека для управления Хепером из Allegro Common LISP
- Симулятор Хепера - 2D симулятор мобильного робота Хепера
- Webots - Коммерческое программное обеспечение, которое имитирует и позволяет кросс-компиляцию и удаленное управление Khepera и другими роботами
- khepera.cfg - Конфигурационный файл Хепера для Проект игрока симулятор робота
- "ЯКС". Freecode. - Еще один симулятор Хепера
- Ящик для инструментов Khepera III - Программный инструментарий для робота Khepera III
- KiKS - симулятор Хеперы - Симулятор Khepera / Khepera II на базе Matlab