Виртуальный прибор - Virtual fixture
А виртуальный прибор представляет собой наложение расширенной сенсорной информации на восприятие пользователем реальной окружающей среды, чтобы улучшить работу человека как непосредственно, так и дистанционно управляемый задачи. Разработан в начале 1990-х гг. Луи Розенберг на Исследовательская лаборатория ВВС США (AFRL), Virtual Fixtures была новаторской платформой в виртуальная реальность и дополненная реальность технологии.
История

Virtual Fixtures был впервые разработан Луи Розенберг в 1992 г. на ВВС США Armstrong Labs, что привело к появлению первого иммерсивного дополненная реальность система когда-либо построенная.[1][2][3][4][5] Поскольку в начале 1990-х годов 3D-графика была слишком медленной, чтобы представить фотореалистичную и пространственно зарегистрированную дополненную реальность, Virtual Fixtures использовала двух реальных физических роботов, управляемых полным экзоскелетом верхней части тела, который носил пользователь. Чтобы создать иммерсивный опыт для пользователя, была использована уникальная конфигурация оптики, которая включала пару бинокулярных луп, выровненных так, чтобы вид пользователя на руки робота был перенесен вперед, так что он выглядел зарегистрированным в точном местоположении реальных физических рук пользователя. .[1][6][4] Результатом стал пространственно зарегистрированный иммерсивный опыт, в котором пользователь двигал руками, видя руки роботов в том месте, где должны были быть его руки. В системе также использовались сгенерированные компьютером виртуальные оверлеи в виде смоделированных физических барьеров, полей и направляющих, предназначенные для помощи пользователю при выполнении реальных физических задач.[7][2]
Закон Фиттса Тестирование производительности проводилось на батареях испытуемых-людей, что впервые продемонстрировало, что существенное улучшение выполнения человеком сложных задач в реальном мире может быть достигнуто за счет предоставления пользователям иммерсивных оверлеев дополненной реальности.[4][8]
Концепция

Концепция виртуальных приспособлений была впервые введена Розенбергом (1992).[1] в качестве наложения виртуальной сенсорной информации на рабочее пространство для повышения производительности человека при выполнении прямых и удаленных задач. Виртуальные сенсорные наложения могут быть представлены как физически реалистичные структуры, зарегистрированные в пространстве таким образом, что они воспринимаются пользователем как полностью присутствующие в реальной рабочей среде. Виртуальные сенсорные наложения также могут быть абстракциями, которые обладают свойствами, недоступными для реальных физических структур. Концепцию сенсорных наложений сложно визуализировать и говорить о ней, как следствие, была введена метафора виртуального приспособления. Чтобы понять, что такое виртуальный прибор, часто используется аналогия с реальным физическим прибором, например, линейкой. Простая задача, такая как рисование прямой линии на листе бумаги от руки, - это задача, которую большинство людей не может выполнить с хорошей точностью и высокой скоростью. Однако использование такого простого приспособления, как линейка, позволяет выполнять задачу быстро и с хорошей точностью. Использование линейки помогает пользователю, направляя перо вдоль линейки, уменьшая тремор и умственную нагрузку пользователя, тем самым повышая качество результатов.
Когда в 1991 году Розенберг предложил ВВС США концепцию виртуального приспособления, в качестве примера использования была расширенная хирургия, расширяющая идею от виртуальной линейки, направляющей настоящий карандаш, до виртуального медицинского приспособления, направляющего реальный физический скальпель, управляемый с помощью инструмента. настоящий хирург.[1] Цель заключалась в том, чтобы наложить виртуальный контент на прямое восприятие хирурга реального рабочего пространства с достаточной реалистичностью, чтобы он воспринимался как подлинное дополнение к хирургической среде и, таким образом, повысил хирургические навыки, ловкость и производительность. Предлагаемое преимущество виртуальных медицинских приборов по сравнению с реальным оборудованием заключалось в том, что, поскольку они были виртуальным дополнением к окружающей реальности, они могли быть частично погружены в реальных пациентов, обеспечивая руководство и / или барьеры в неэкспонированных тканях.[9][1]
Определение виртуальных приспособлений Розенбергом[1][6][7] намного шире, чем просто руководство конечным эффектором. Например, слуховые виртуальные приспособления используются для повышения осведомленности пользователя путем предоставления звуковых подсказок, которые помогают пользователю, предоставляя многомодальные подсказки для локализации конечного эффектора. Розенберг утверждает, что успех виртуальных приборов обусловлен не только тем, что пользователь руководствуется прибором, но и тем, что пользователь ощущает большее присутствие и лучшую локализацию в удаленном рабочем пространстве. Однако в контексте систем взаимодействия человека и машины термин виртуальные приспособления часто используется для обозначения виртуального вспомогательного средства, зависящего от задачи, которое накладывается на реальную среду и направляет движение пользователя в желаемых направлениях, предотвращая движение в нежелательных направлениях или регионах. рабочего пространства. Это тип виртуальных приборов, который подробно описан в следующем разделе этой статьи.
Виртуальные светильники могут быть управление виртуальными приборами или же запрещенные регионы виртуальные приспособления. Виртуальный прибор запрещенных областей может использоваться, например, в дистанционно управляемый настройка, при которой оператор должен управлять транспортным средством на удаленном участке для достижения цели. Если на удаленном участке есть ямы, которые могут быть опасны для транспортного средства, чтобы попасть в запрещенные зоны, можно определить в различных местоположениях ям, тем самым не позволяя оператору подавать команды, которые могли бы привести к тому, что транспортное средство попадет в такую яму.
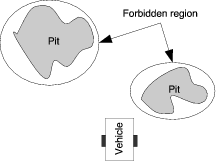
Такие недопустимые команды могут быть легко отправлены оператором из-за, например, задержек в телеоперация петля, бедная телеприсутствие или по ряду других причин.
Примером управляющего виртуального приспособления может быть когда транспортное средство должно следовать определенной траектории,

После этого оператор может контролировать ход предпочтительное направление при движении по нежелательное направление сдерживается.
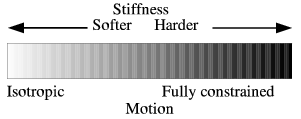
Как с запрещенными областями, так и с виртуальными приборами жесткость, или наоборот согласие, приспособления можно регулировать. Если податливость высокая (низкая жесткость), приспособление мягкий. С другой стороны, когда податливость равна нулю (максимальная жесткость), приспособление жесткий.
Закон управления виртуальным прибором
В этом разделе описывается, как можно получить закон управления, реализующий виртуальные приборы. Предполагается, что робот представляет собой чисто кинематическое устройство с положением рабочего органа. и ориентация конечных эффекторов выражается в базовой раме робота . Входной управляющий сигнал для робота предполагается желаемая скорость конечного эффектора . В системе с дистанционным управлением часто бывает полезно масштабировать скорость ввода от оператора, перед подачей на контроллер робота. Если ввод от пользователя имеет другую форму, такую как сила или положение, он должен сначала быть преобразован во входную скорость, например, путем масштабирования или дифференцирования.
![{displaystyle mathbf {p} = left [x, y, zight]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/96535791dbff9edd1c97cd7159bf4dd9983516d7)
![{displaystyle mathbf {r} = left [r_ {extrm {x}}, r_ {extrm {y}}, r_ {extrm {z}} ight]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/51f2ce0e1c1a6a89f81d0bde14bc814fdbd89203)


![{displaystyle mathbf {v} = {dot {mathbf {x}}} = left [{dot {mathbf {p}}}, {dot {mathbf {r}}} ight]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/901efddc4fbd62de1cb7b3bfe38abc14a6414d3f)

Таким образом, управляющий сигнал будет вычисляться из скорости ввода оператора в качестве:

Если существует взаимно однозначное соответствие между оператором и ведомым роботом.

Если постоянная заменяется диагональной матрицей можно независимо регулировать соответствие для разных размеров . Например, установив первые три элемента по диагонали к и все остальные элементы, обнуленные, приведет к системе, которая допускает только поступательное движение, но не вращение. Это будет пример жесткого виртуального приспособления, которое ограничивает движение от к . Если бы остальные элементы на диагонали были установлены на небольшое значение вместо нуля, приспособление было бы мягким, допускающим некоторое движение в направлениях вращения.





Чтобы выразить более общие ограничения, предположим, что матрица, изменяющаяся во времени что представляет собой предпочтительное направление во время . Таким образом, если предпочтительное направление - по кривой в . Так же, даст предпочтительные направления, охватывающие поверхность. Из могут быть определены два оператора проекции,[10] диапазон и ядро пространства столбцов:
![{displaystyle mathbf {D} (t) в mathbb {R} ^ {6 imes n}, ~ nin [1..6]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d2e6e2ff7d51e12b2d63bf3a7970dd45dc49157a)





![{displaystyle {egin {align} {extrm {Span}} (mathbf {D}) & Equiv left [mathbf {D} ight] = mathbf {D} (mathbf {D} ^ {T} mathbf {D}) ^ {- 1} mathbf {D} ^ {T} {extrm {Kernel}} (mathbf {D}) и эквивалентный угол mathbf {D} angle = mathbf {I} -left [mathbf {D} ight] конец {выровнен}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5414a2f8c7a2288013fc3ff61d72cfd9eaf78179)
Если не имеет полного ранга столбца, интервал не может быть вычислен, следовательно, лучше вычислить интервал, используя псевдообратное выражение,[10] таким образом, на практике интервал вычисляется как:
![{displaystyle {extrm {Span}} (mathbf {D}) Equiv left [mathbf {D} ight] = mathbf {D} (mathbf {D} ^ {T} mathbf {D}) ^ {dagger} mathbf {D} ^ {T}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6f17473d67e794db5ff5ead848d6cff1f5a681fb)
куда обозначает псевдообратный .

Если входная скорость разделена на две составляющие:
![{displaystyle mathbf {v} _ {extrm {D}} Equiv left [mathbf {D} ight] mathbf {v} _ {extrm {op}} {extrm {~ and ~}} mathbf {v} _ {au} Equiv mathbf {v} _ {extrm {op}} - mathbf {v} _ {extrm {D}} = langle mathbf {D} angle mathbf {v} _ {extrm {op}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2befafa8da291bab77720a9006c89dde5233f46e)
закон управления можно переписать как:

Затем введите новое соответствие, которое влияет только на нежелательный компонент входной скорости, и запишите окончательный закон управления как:
![{displaystyle mathbf {v} = расщелина (mathbf {v} _ {extrm {D}} + c_ {au} cdot mathbf {v} _ {au} ight) = расщелина (left [mathbf {D} ight] + c_ { au} langle mathbf {D} angle ight) mathbf {v} _ {extrm {op}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/225c46a7bc10d7cd8ad29b88995d93dac6654026)
Рекомендации
- ^ а б c d е ж Л. Б. Розенберг (1992). «Использование виртуальных приборов в качестве наложений восприятия для повышения производительности оператора в удаленных средах» (PDF). Технический отчет AL-TR-0089. База Райт-Паттерсон, штат Огайо: Лаборатория ВВС США в Армстронге.
- ^ а б Розенберг, Л. (1993). Виртуальные приборы: перцептивные инструменты для телероботических манипуляций. IEEE. Дои:10.1109 / vrais.1993.380795. ISBN 0-7803-1363-1.
- ^ Розенберг, Луи (1993). «Использование виртуальных приборов для улучшения телеманипуляции с задержкой по времени». Материалы зимнего ежегодного собрания ASME по достижениям в робототехнике, мехатронике и тактильных интерфейсах. Новый Орлеан, Луизиана. 49: 29–36.
- ^ а б c Розенберг, Луи (1993). «Использование виртуальных устройств для повышения производительности оператора при дистанционной работе с задержкой» (PDF). J. Dyn. Syst. Контроль. 49: 29–36.
- ^ Ноер, Майкл (1998-09-21). «Отпечатки пальцев на рабочем столе». Forbes. Получено 22 апреля 2014.
- ^ а б Розенберг, Л. (1993). «Виртуальные устройства как инструменты для повышения производительности оператора в средах дистанционного присутствия». Технология манипуляторов SPIE. 2057: 10. Bibcode:1993SPIE.2057 ... 10R. Дои:10.1117/12.164901.
- ^ а б Розенберг (1994). «Виртуальные тактильные наложения повышают производительность в задачах телеприсутствия». Телеманипулятор и технологии телеприсутствия. Дои:10.1117/12.197302.
- ^ Розенберг, Луи Б. (1993). «Виртуальные устройства как инструменты для повышения производительности оператора в средах дистанционного присутствия». Телеманипуляторная техника и космическая телероботика. 2057: 10–21. Bibcode:1993SPIE.2057 ... 10R. Дои:10.1117/12.164901.
- ^ Розенберг, Л. Б. (1992). «Использование виртуальных приборов в качестве перцептивных наложений для повышения производительности оператора» Стэнфордский университет, Стэнфордский штат Калифорния, Центр исследований дизайна (CDR)
- ^ а б Marayong, P .; Окамура, A.M .; Хагер, Г.Д. (2003). Ограничения пространственного движения: теория и демонстрации для управления роботом с использованием виртуальных приспособлений. IEEE. п. 1270–1275. Дои:10.1109 / robot.2003.1241880. ISBN 0-7803-7736-2.