Низкочастотный радиодиапазон - Low-frequency radio range

В низкочастотный радиодиапазон, также известный как радиомаяк с четырьмя курсами, НЧ / СЧ радиостанция с четырьмя курсами, Радиостанция A-N, Радиостанция Adcock, или обычно "диапазон", было главным система навигации используется самолетом для полет по приборам в 1930-х и 1940-х годах, до появления Всенаправленный VHF диапазон (VOR), начиная с конца 1940-х гг. Он использовался для навигации по маршруту, а также инструментальные подходы и держит.[1][2][3]
На основе сети радиовышек, передающих направленный радиосигналы, диапазон радиосвязи определяется конкретным дыхательные пути в небе. Пилоты управляли с помощью низкочастотного радио, слушая поток автоматических "A" и "N" Коды Морзе. Например, они поворачивают самолет вправо, когда слышат поток "N" ("dah-dit, dah-dit, ..."), влево, когда слышат поток "A" ("di-dah, ди-дах, ... ") и летите прямо вперед, слыша ровный тон.[4]
По мере того, как система VOR вводилась во всем мире, низкочастотный радиодиапазон постепенно сокращался, в основном исчезнув к 1970-м годам. На сегодняшний день нет оставшихся действующих объектов. При максимальном использовании только в США было около 400 станций, использующих исключительно низкочастотный диапазон радиосвязи.[2]
История


После Первая Мировая Война, авиация начала расширять свою роль на гражданской арене, начиная с авиапочта полеты. Вскоре стало очевидно, что для надежной доставки почты, а также для предстоящих вскоре пассажирских рейсов требовалось решение для навигации в ночное время и в условиях плохой видимости. В США сеть зажженные маяки, похожий на морской маяки, был построен для пилотов авиапочты. Но маяки пригодились в основном ночью и в хорошую погоду, а в плохая видимость их не было видно. Ученые и инженеры поняли, что решение для радионавигации позволит пилотам «видеть» при любых условиях полета, и решили, что необходима сеть направленных радиолучей.[5]
24 сентября 1929 г. тогдашний лейтенант (впоследствии генерал) Джеймс Х. «Джимми» Дулитл Армия США продемонстрировала первый «слепой» полет, выполняемый исключительно по приборам и без внешней видимости, и доказал, что полет по приборам было возможно.[6][7] Дулитл использовал недавно разработанные гироскопический инструменты—индикатор отношения и гирокомпас - помочь ему сохранить отношение самолета и Заголовок, а также специально разработанная радиосистема для навигации в аэропорт и обратно.[8][примечание 1] Экспериментальное оборудование Дулитла было специально построено для его демонстрационных полетов; Чтобы полеты по приборам стали практичными, эта технология должна быть надежной, серийной и широко применяемой как на земле, так и в парке самолетов.[5]
Существовало два технологических подхода для компонентов наземной и воздушной радионавигации, которые оценивались в конце 1920-х - начале 1930-х годов.
На земле для получения направленных радиолучей с четко определенным навигационным курсом пересекались рамочные антенны использовались изначально. Первая система низкочастотного радиодиапазона на основе петли была введена в эксплуатацию Министерством торговли США 30 июня 1928 года.[2][5] Но конструкция рамочной антенны страдала от плохих характеристик, особенно в ночное время, и к 1932 году Антенна Adcock Решетка с превосходной точностью стала предпочтительным решением и заменила рамочные антенны. В Министерство торговли США с Отделение аэронавтики назвал решение Adcock "T-L Antenna" (от "Transmission Line") и изначально не упомянул имя Adcock.[5][9]

В воздухе витали два конкурирующих дизайна, созданных группами разного происхождения и потребностей. В Армейский корпус связи, представляющие военных авиаторов, предпочли решение, основанное на потоке аудионавигационных сигналов, постоянно подаваемых в уши пилотов через наушники. С другой стороны, гражданские пилоты, которые в основном были пилотами авиапочты, летающими по пересеченной местности для доставки почты, чувствовали, что звуковые сигналы будут раздражать и их трудно использовать во время длительных перелетов, и предпочли визуальное решение с индикатором на приборной панели.[5]
На основе вибрирующих язычков был разработан визуальный индикатор, представляющий собой простой панельный индикатор поворота влево-вправо. Она была надежной, простой в использовании и более устойчивой к ошибочным сигналам, чем конкурирующая аудиосистема. Согласно опубликованному отчету, пилоты, которые летали с использованием как слуховой, так и визуальной систем, сильно предпочитали визуальный тип.[5][10] Решение на основе тростника было проигнорировано правительство США Однако аудиосигналы стали стандартом на десятилетия вперед.[5][9]
К 1930-м годам сеть наземных низкочастотных радиопередатчиков в сочетании с бортовыми AM-радиоприемниками стала жизненно важной частью полетов по приборам. Низкочастотные радиопередатчики обеспечивали навигацию самолетов для полетов и заходов на посадку практически при любых погодных условиях, помогая реализовать согласованные и надежные расписания полетов.[4]
Радиодальность оставалась основной радионавигационной системой в США и других странах, пока ее постепенно не заменили значительно улучшенной. УКВ на основе технологии VOR, начиная с конца 1940-х годов. VOR, который используется до сих пор, включает в себя визуальный индикатор влево-вправо.[2][9][11][12]
Технологии
Земля

Наземный низкочастотный компонент радиосвязи состоял из сети радиопередающих станций, которые были стратегически расположены по всей стране, часто около крупных аэропортов, на расстоянии примерно 200 миль друг от друга. Ранние низкочастотные станции использовали перекрестные рамочные антенны, но все более поздние конструкции были основаны на Вертикальная антенная решетка Adcock для повышения производительности, особенно ночью.[3][5]
Каждая радиостанция Adcock имела четыре антенные башни высотой 134 фута (41 м), установленные на углах квадрата 425 × 425 футов, с дополнительной дополнительной вышкой в центре для передачи голоса и самонаведение.[3][5][9] Станции излучали направленные электромагнитное излучение от 190 до 535 кГц и 1500Вт, на четыре квадранта.[1][13][заметка 2] Излучение одной пары противоположных квадрантов было модулировано (на звуковой частоте 1020Гц ) с азбука Морзе для письма А (· —), а другая пара с буквой N (— ·).[заметка 3] Пересечения между квадрантами определяли четыре линии курса, исходящие от передающей станции по четырем направлениям компаса, где А и N сигналы были равной интенсивности, а их объединенные коды Морзе сливались в устойчивый звуковой тон 1020 Гц. Эти линии курса (также называемые «ноги»), где можно было услышать только тональный сигнал, определяли дыхательные пути.[11]

Помимо повторяющихся А или же N модуляции сигнала, каждая передающая станция также будет передавать свой двухбуквенный идентификатор кода Морзе каждые тридцать секунд для положительной идентификации.[14] Идентификатор станции будет отправлен дважды: сначала на N пару передатчиков, затем на А, чтобы обеспечить охват во всех квадрантах.[3][примечание 4] Кроме того, на некоторых установках местные погодные условия периодически транслировались голосом на частотах диапазона, вытесняя навигационные сигналы, но в конечном итоге это было сделано на центральной пятой башне.[15][примечание 5]
Изначально низкочастотный радиодиапазон сопровождался радиомаяки, которые использовались в качестве визуальной поддержки, особенно для ночных полетов.[4] Дополнительные «маркерные маяки» (маломощные радиопередатчики УКВ) иногда включались в качестве дополнительных ориентиров.[16]
Воздуха

Бортовые радиоприемники - изначально простые Амплитудная модуляция (AM) наборы - были настроены на частоту низкочастотных наземных радиопередатчиков, и звук кода Морзе обнаруживался и усиливался в динамиках, обычно в наушниках, которые носили пилоты.[4] Пилоты постоянно слушали звуковой сигнал и пытались вести самолет по линии курса («летящий луч»), где был бы слышен однородный тон. Если сигнал из одной буквы (А или же N) стал отчетливо различимым, самолет поворачивался по мере необходимости, чтобы модуляция двух букв снова перекрывалась, и звук кода Морзе становился ровным.[2] Район "на курсе", где А и N слитая на слух, ширина составляла около 3 °, что соответствует ширине курса ± 2,6 мили на расстоянии 100 миль от станции.[4]
Пилоты должны были убедиться, что они настроены на правильную частоту радиостанции, сравнив ее код Морзе с идентификатором, опубликованным на их навигационных картах. Они также проверяли, летят ли они к станции или от нее, определяя, становится ли уровень сигнала (то есть громкость звукового сигнала) сильнее или слабее.[4]
Подходит и держит

Конечные участки захода на посадку низкочастотного радио инструментальные подходы обычно летали возле полигона, что обеспечивало повышенную точность. Когда самолет находился над станцией, звуковой сигнал пропадал, так как непосредственно над передающими вышками не было сигнала модуляции. Эта тихая зона, называемая "конус тишины ", означал для пилотов, что самолет находился прямо над станцией, служа положительной наземной точкой отсчета для схемы захода на посадку.[2][4]
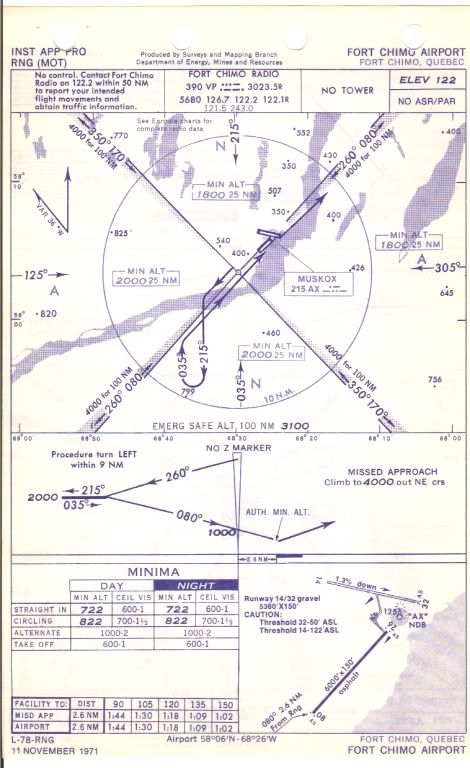
В типичной схеме захода на посадку с использованием низкочастотных радиоприборов последний подход начнется над станцией дальности с поворота на определенный курс. Пилот должен снизиться до указанного минимальная высота спуска (MDA), и если аэропорт не был виден в течение указанного времени (на основе путевая скорость ), а уход на второй круг процедура будет начата. В изображенном Джолиет, Иллинойс процедура захода на посадку по низкочастотной радиосвязи, минимальная высота снижения может составлять всего 300 футов AGL, и необходимая минимальная видимость одна миля, в зависимости от типа самолета.[16][17]

Низкочастотный радиодиапазон также позволял управления воздушным движением инструктировать пилотов входить в образец удержания «на луче», то есть на одной из низкочастотных ветвей, с фиксацией (ключевой поворотной точкой) над низкочастотной радиостанцией, в конусе тишины или над одним из маркеров веера. Трюмы использовались либо во время полета по маршруту, либо как часть процедуры захода на посадку возле аэровокзала. Удержания низкочастотного радио были более точными, чем NDB выполняется, поскольку НБР держит курсы основаны на точности бортового магнитный компас, в то время как удержание низкочастотного радио было таким же точным, как низкочастотный участок радиосвязи, с приблизительной шириной курса 3 °.[3]
Ненаправленные маяки

С самого начала в начале 1930-х годов низкочастотное радио было дополнено низкочастотным радио. Ненаправленные маяки (NDB). В то время как низкочастотное радио требовало сложной наземной установки и только простого AM-приемника на борту самолета, наземные установки NDB были простыми одноантенными передатчиками, требующими несколько более сложного оборудования на борту самолета. Диаграмма радиоизлучения NDB была однородной во всех направлениях в горизонтальная плоскость. Бортовой приемник NDB получил название радиопеленгатор (RDF). Комбинация NDB-RDF позволяла пилотам определять направление наземной станции NDB относительно направления, на которое указывал самолет. При использовании вместе с бортовым магнитный компас, пилот мог перейти на станцию или от нее вдоль любой выбран конечно исходящий от станции.
Ранние приемники RDF были дорогими, громоздкими и сложными в эксплуатации, но более простая и менее дорогая наземная установка позволяла легко добавлять NDB на основе путевые точки и подходы, чтобы дополнить систему низкочастотного радио.[4] Современные приемники RDF, называемые «автоматическими пеленгаторами» (или «ADF»), имеют небольшие размеры, низкую стоимость и просты в эксплуатации. Система NDB-ADF остается сегодня в качестве дополнения и резервной копии для более новых VOR и GPS системы навигации, хотя она постепенно выводится из употребления.[18][19]Все вопросы по работе NDB / ADF удалены из FAA материалы пилотных сертификационных испытаний до октября 2017 г. [20]
Ограничения
Хотя низкочастотная радиосистема использовалась в течение десятилетий в качестве основного метода воздушной навигации во время низкая видимость и ночные полеты, у него были известные ограничения и недостатки. Линии курса, которые были результатом баланса между диаграммами направленности от различных передатчиков, будут колебаться в зависимости от погодных условий, растительности или снежного покрова вблизи станции и даже от бортового приемника. угол антенны. При некоторых условиях сигналы от А квадрант "перескочил" в N квадрант (или наоборот), вызывающий ложный «виртуальный курс» далеко от любой реальной линии курса. Также, грозы и другие атмосферные возмущения могут создать электромагнитная интерференция нарушать дальность сигналов и производить треск "статический" в шлемах пилотов.[15]
Замена на ВОР

Для низкочастотной радионавигационной системы требовалось, как минимум, только простое Радиоприемник AM на борту самолета, чтобы точно ориентироваться в дыхательных путях под приборные метеорологические условия, и даже выполнить инструментальный подход до низких минимумов.[примечание 7] С другой стороны, у него было только четыре направления курса на станцию, он был чувствителен к атмосферным и другим типам помех и аберраций и требовал от пилотов часами слушать надоедливый монотонный звуковой сигнал или слабый поток кодов Морзе, часто встраиваемых. в фоновом режиме "статический". Его возможная замена, УКВ группа VOR система навигации имела много преимуществ. VOR был практически невосприимчив к помехам, имел 360 доступных направлений курса, имел визуальный дисплей «на курсе» (без необходимости прослушивания) и был намного проще в использовании.[12] Следовательно, когда система VOR стала доступной в начале 1950-х годов, ее принятие было быстрым, и в течение десятилетия низкочастотное радио было в основном прекращено. Сам VOR сегодня постепенно сокращается в пользу гораздо более совершенных спутниковая система навигации (GPS).[9][19]
Звуки
Ниже приведены смоделированные звуки для Серебряное озеро низкочастотное радио. Станция дальности действия - расположена примерно в 10 милях к северу от Бейкер, Калифорния - прерывал навигационные сигналы каждые 30 секунд для передачи своего идентификатора кода Морзе («RL»). Идентификация станции будет слышна один или два раза, возможно, с разной относительной амплитудой, в зависимости от местоположения самолета.[3] Пилоты могли слушать эти звуки и ориентироваться по ним часами во время полета.[2][4] Фактические звуки содержали "статический", помехи и другие искажения, не воспроизведенные при моделировании.[4] Регулировка громкости повлияет на эффективную ширину курса.[3] Например, в смоделированном звуке для «Сумерки» А внизу, где самолет почти на луче, но немного внутри А квадрант, низкая громкость почти скрывает слабые А звук, тогда как громкий делает его более отчетливым.




(Видеть Википедия: Помощь СМИ если у вас возникнут проблемы с воспроизведением этих звуковых файлов.)
Примечания
- ^ Дулиттл также использовал стандартный поворот и крен прибор, который был относительно распространен ко времени его полета.[8]
- ^ В соответствии с международные стандарты, полоса частот ниже 300 кГц равна "Низкая частота ", и выше"Средняя частота Так как частоты LFR «пересекали» разделительную линию между двумя диапазонами, они технически назывались станциями «диапазона низких / средних частот (LF / MF)».
- ^ В США квадрант, который включал истинный северный радиал, обозначался как N (если участок курса был точно на истинном севере, тогда северо-западный квадрант стал N); в Канаде, N был квадрантом, который включал истинный радиал 045 °.[3]
- ^ Поскольку идентификационные данные станции передавались последовательно, сначала на N а затем А пары антенн, пилот услышит его один или два раза, возможно, с разной относительной амплитудой, в зависимости от местоположения самолета. Например, он будет слышен дважды, когда находится на луче, и только один раз, когда находится внутри квадранта.[3]
- ^ Пилоты должны были запросить прекращение сводки погоды, если они использовали LFR для захода на посадку.[3]
- ^ Каждые 30 секунд идентификатор азбуки Морзе станции Silver Lake, «ди-дах-дит ди-дах-ди-дит» (R-L), должен был прерывать навигационные сигналы.
- ^ Все равно понадобятся базовые летные приборы.
Смотрите также
Рекомендации
- ^ а б Лоуренс, Гарри (2004). «Воздушные трассы - от световых маяков к радионавигации». Авиация и роль правительства. Кендалл Хант. п. 92. ISBN 0-7575-0944-4.
- ^ а б c d е ж грамм "Радиодиапазон с четырьмя курсами (низкочастотный радиодиапазон (LFR))". Музей управления воздушным движением. Архивировано из оригинал 22 июня 2009 г.. Получено 2009-07-21.
- ^ а б c d е ж грамм час я j "Радиополигон". Полеты по приборам - Руководство AF 51-37. Командование воздушной подготовки, Управление ВВС. 20 января 1966 г. С. 14 / 1–17.
- ^ а б c d е ж грамм час я j "На луче". www.navfltsm.addr.com. Получено 2009-07-21.
- ^ а б c d е ж грамм час я «СЛУЧАЙНЫЙ ПОЛЕТ НА ЛУЧЕ: АЭРОНАВИГАЦИОННАЯ СВЯЗЬ, НАВИГАЦИЯ И НАБЛЮДЕНИЕ: ЕГО ИСТОКИ И ПОЛИТИКА ТЕХНОЛОГИИ» (PDF). Журнал воздушного транспорта. 2003 г.
- ^ "Летающий вслепую: краткая история достижений авиации, 1918-1930 гг.". Колумбийский университет. Архивировано из оригинал на 2010-01-02. Получено 2009-07-24.
- ^ "'СЛЕПЫЙ САМОЛЕТ ПРОЛЕТИТ 15 МИЛЬ И ЗЕМЛИ; ПРЕОДОЛЕНИЕ ПЕРИЛА ТУМА ". Нью-Йорк Таймс. 25 сентября 1929 г. с. 1.
- ^ а б Хеппенгеймер, Т.А. (1995). "Летающий слепой". Журнал изобретений и технологий. 10 (4).[постоянная мертвая ссылка ]
- ^ а б c d е "ИСТОРИЧЕСКАЯ ХРОНОЛОГИЯ FAA, 1926-1996 гг." (PDF). Архивировано из оригинал (PDF) на 2008-06-24. Получено 2009-07-30.
- ^ «Новый беспроводной маяк для Кройдона». Полет. 27 ноября 1931 г. с. 1177.
- ^ а б Нагараджа (2001). "Радиодиапазон НЧ / СЧ с четырьмя курсами". Элементы электронной навигации. Тата МакГроу-Хилл. ISBN 0-07-462301-X.
- ^ а б Система управления аэропортом и воздушным движением. Дайан Паблишинг. 1982. с. 28. ISBN 1-4289-2410-8.
- ^ "Антенна Adcock". Виртуальный институт прикладных наук. Архивировано из оригинал на 2009-05-11. Получено 2009-07-22.
- ^ Коды идентификации станции LFR варьируются от одной до трех букв.
- ^ а б «Летящие лучи». Популярная механика. Журналы Hearst: 402–404, 138A, 140A, 142A. Март 1936 г. ISSN 0032-4558.
- ^ а б Томпсон, Скотт А. (1990). Проверка полета!: История проверки полета Faa. Издательство ДИАНА. п. 46. ISBN 0-7881-4728-5.
- ^ Министерство торговли США (16 января 1957 г.). Процедура захода на посадку в аэропорту Джолиет (CAA). Берегово-геодезические изыскания.
- ^ «Основы ADF». 6 сентября 1998 г.. Получено 2009-07-30.
- ^ а б Кларк, Билл (1998). Путеводитель авиатора по GPS. McGraw-Hill Professional. С. 110–111. ISBN 0-07-009493-4.
- ^ ""Что нового и грядущее в тестировании пилотов"" (PDF). Октябрь 2017. с. 5. Получено 2020-07-24.
дальнейшее чтение
- Озер, Ханс Дж. «Разработка системы радиомаяка для дыхательных путей визуального типа» (PDF). Национальный институт стандартов и технологий. Получено 2009-08-02. Цитировать журнал требует
| журнал =(помощь) - Diamond, H .; Данмор, Ф. У. (19 сентября 1930 г.). «Радиосистема для слепой посадки самолетов в тумане» (PDF). Труды Национальной академии наук. Цитировать журнал требует
| журнал =(помощь) - Конвей, Эрик М. (2006). Посадка вслепую: операции в условиях малой заметности в американской авиации, 1918-1958 гг.. JHU Press. ISBN 0-8018-8449-7.
- "Интервью с Джеймсом Х. Дулиттлом" (PDF). Колумбийский университет. Архивировано из оригинал (PDF) на 2010-01-15. Получено 2009-08-02.
- «Визуально-слуховой радиодиапазон». Музей авиалиний. Получено 2010-05-19.
{kind=link}