Машинное обоняние - Machine olfaction
Эта статья поднимает множество проблем. Пожалуйста помоги Улучши это или обсудите эти вопросы на страница обсуждения. (Узнайте, как и когда удалить эти сообщения-шаблоны) (Узнайте, как и когда удалить этот шаблон сообщения)
|
Машинное обоняние это автоматизированное моделирование Чувство обоняния. Это новое приложение в современной инженерии, которое включает использование роботов или других автоматизированных систем для анализа переносимых по воздуху химических веществ. Такой аппарат часто называют электронный нос или электронный нос. Развитие машинного обоняния осложняется тем фактом, что электронные носовые устройства на сегодняшний день реагируют на ограниченное количество химикатов, тогда как запахи производятся с помощью уникальных наборов (потенциально многочисленных) одорантов. Технология, хотя и все еще находится на ранней стадии разработки, обещает множество приложений, таких как:[1]контроль качества в переработка пищевых продуктов, обнаружение и диагноз в медицине,[2] обнаружение наркотиков, взрывчатые вещества и другие опасные или запрещенные вещества,[3] реагирование на стихийные бедствия и мониторинг окружающей среды.
Один из типов предлагаемой технологии машинного обоняния - через газ. матрица датчиков приборы, способные обнаруживать, идентифицировать и измерять летучие соединения. Однако одним из важнейших элементов разработки этих инструментов является анализ паттернов, а успешный дизайн системы анализа паттернов для машинного обоняния требует тщательного рассмотрения различных вопросов, связанных с обработкой многомерных данных: предварительной обработки сигналов, извлечение признаков, выбор функции, классификация, регресс, кластеризация, и проверка.[4] Еще одна проблема в текущих исследованиях обоняния машин - это необходимость предсказать или оценить реакцию сенсора на ароматические смеси.[5] Немного распознавание образов Проблемы машинного обоняния, такие как классификация запахов и локализация запахов, могут быть решены с помощью ядерных методов временных рядов.[6]
Обнаружение
Существует три основных метода обнаружения с использованием датчиков запаха из проводящего полимера (полипиррол), датчиков газа на основе оксида олова и датчиков микробаланса на кристалле кварца.[нужна цитата ] Обычно они включают (1) массив датчиков определенного типа, (2) электронику для опроса этих датчиков и создания цифровых сигналов, и (3) программное обеспечение для обработки данных и пользовательского интерфейса.
Вся система представляет собой средство преобразования сложных откликов датчиков в качественный профиль летучих (или сложной смеси химических летучих веществ), составляющих запах, в виде выходных данных.
Обычные электронные носы не являются аналитическими инструментами в классическом смысле слова, и очень немногие заявляют, что могут количественно определять запах. Эти инструменты сначала «обучаются» целевому запаху, а затем используются для «распознавания» запахов, чтобы будущие образцы можно было идентифицировать как «хорошие» или «плохие».
Исследование альтернативных методов распознавания образов для химический датчик array предлагает решения, позволяющие различать искусственное и биологическое обоняние, связанное с размерностью. Этот биологически вдохновленный подход предполагает создание уникальных алгоритмов обработки информации.[7]
Электронные носы способны различать запахи и летучие вещества из широкого диапазона источников. В приведенном ниже списке показаны лишь некоторые из типичных применений технологии электронного носа - многие из них поддерживаются исследованиями и опубликованными техническими статьями.
Локализация запаха
Локализация запаха - это комбинация количественного химического анализа запаха и алгоритмов поиска пути, а условия окружающей среды играют жизненно важную роль в качестве локализации. Разные методы исследуются для разных целей и в разных реальных условиях.
Мотивация
Локализация запаха - это метод и процесс обнаружения летучего химического источника в среде, содержащей один или несколько запахов. Это жизненно важно для всех живых существ как для получения пропитания, так и для избежания опасности. В отличие от другого основного человека чувства, обоняние полностью основано на химических веществах. Однако по сравнению с другими измерениями восприятия обнаружение запаха сталкивается с дополнительными проблемами из-за сложных динамических уравнений запаха и непредсказуемых внешних возмущений, таких как ветер.
Заявление
Технология локализации запахов перспективна во многих областях, в том числе:[8][1]
- контроль качества в переработка пищевых продуктов (например, загрязнения, бактериальные порча )
- обнаружение источника опасных веществ (например, взрывчатых веществ и химическая война агенты)
- обнаружение подземных ресурсов или опасностей
- обнаружение запрещенных материалов (например: обнаружение наркотиков )
- поиск выживших Стихийные бедствия
- мониторинг окружающей среды для загрязняющих веществ
- ранняя диагностика заболеваний (например, в хроническая обструктивная болезнь легких )[2]
История и постановка проблемы
Самым ранним прибором для обнаружения специфического запаха был механический нос, разработанный в 1961 году Робертом Уайтоном Монкриффом. Первый электронный нос был создан В. Ф. Вилкенсом и Дж. Д. Хартманом в 1964 году.[9] Ларком и Холсолл обсуждали использование роботов для обнаружения запахов в атомной промышленности в начале 1980-х годов.[10] а исследования по локализации запаха были начаты в начале 1990-х годов. Локализация запахов - это сейчас быстрорастущая область. Были разработаны различные датчики и предложены различные алгоритмы для различных сред и условий.
Механическая локализация запаха может быть выполнена с помощью следующих трех шагов: (1) поиск наличия летучего химического вещества (2) поиск местоположения источника с помощью набора датчиков запаха и определенных алгоритмов и (3) идентификация отслеживаемых источник запаха (распознавание запаха).
Методы локализации
Методы локализации запаха часто классифицируются в соответствии с режимами распространения запаха в различных условиях окружающей среды. Эти режимы обычно можно разделить на две категории: поток жидкости с преобладанием диффузии и поток жидкости с преобладанием турбулентности. У них разные алгоритмы локализации запаха, обсуждаемые ниже.
Поток жидкости с преобладанием диффузии
Методы отслеживания и локализации потока жидкости с преобладающей диффузией, которые в основном используются для локализации запаха под землей, должны быть разработаны таким образом, чтобы обонятельные машины могли работать в средах, в которых движение жидкости определяется вязкостью. Это означает, что диффузия приводит к рассеиванию потока запаха, и концентрация запаха уменьшается от источника как Гауссово распределение.[11]
Распространение химического пара через почву без внешнего градиента давления часто моделируется следующим образом: Второй закон Фика:

куда D - постоянная диффузии, d расстояние в направлении диффузии, C химическая концентрация и т время.
Предполагая, что поток химического запаха рассеивается только в одном направлении с однородным профилем поперечного сечения, зависимость концентрации запаха на определенном расстоянии и в определенный момент времени между концентрациями источника запаха моделируется как

куда - концентрация источника запаха. Это простейшее динамическое уравнение при моделировании обнаружения запаха без учета внешнего ветра или других помех. В рамках модели распространения с преобладанием диффузии были разработаны различные алгоритмы простого отслеживания градиентов концентрации химических веществ для обнаружения источника запаха.

Кишечная палочка алгоритм
Простой метод отслеживания - это Кишечная палочка алгоритм.[12] В этом процессе датчик запаха просто сравнивает информацию о концентрации из разных мест. Робот движется по повторяющимся прямым линиям в случайных направлениях. Когда информация о запахе в текущем состоянии улучшится по сравнению с предыдущим показанием, робот продолжит движение по текущему пути. Однако, когда текущее состояние хуже, чем предыдущее, робот отступит, а затем двинется в другом случайном направлении. Этот метод прост и эффективен, однако длина пути сильно варьируется, и количество ошибок увеличивается по мере приближения к источнику.[требуется дальнейшее объяснение ]
Алгоритм шестнадцатеричного пути и алгоритм додекаэдра
Другой метод, основанный на диффузионной модели, - алгоритм шестнадцатеричного пути, разработанный Р. Эндрю Расселом.[12] для локализации химического запаха под землей с помощью скрытого зонда, управляемого роботом-манипулятором.[12][13] Зонд перемещается на определенную глубину по краям плотно упакованной гексагональной сетки. На каждом перекрестке штатов п, есть два пути (левый и правый) для выбора, и робот пойдет по пути, который приведет к более высокой концентрации запаха на основе информации о концентрации запаха в двух предыдущих состояниях соединения. п−1, п−2. В 3D-версии шестнадцатеричный путь алгоритм, алгоритм додекаэдра, зонд движется по пути, который соответствует плотно упакованному додекаэдр, так что в каждой точке состояния есть три возможных варианта пути.
Поток жидкости с преобладанием турбулентности
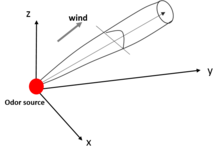
В потоке жидкости с преобладающей турбулентностью методы локализации предназначены для обработки фонового потока жидкости (ветра или воды) как прерывания турбулентности. Большинство алгоритмов этой категории основаны на шлейф моделирование (рисунок 1).[14]
Динамика плюма основана на гауссовых моделях, которые основаны на Уравнения Навье – Стокса. Упрощенное граничное условие гауссовой модели:

куда DИкс и Dу постоянные диффузии; - линейная скорость ветра в Икс направление, - линейная скорость ветра в у направление. Кроме того, предполагая, что окружающая среда однородна и источник шлейфа постоянен, уравнение для обнаружения запаха в каждом датчике робота в каждый момент времени обнаружения т−th является



куда это т−th образец я−th датчик коэффициент усиления, является k−th интенсивность источника, это расположение k−th источник, параметр затухания шлейфа, фоновый шум, удовлетворяющий . При моделировании шлейфа можно использовать различные алгоритмы для локализации источника запаха.







Алгоритм триангуляции
Простым алгоритмом, который можно использовать для оценки местоположения, является метод триангуляции (рисунок 2). Рассмотрим приведенное выше уравнение обнаружения запаха, положение источника запаха можно оценить, указав расстояния до датчиков на одной стороне уравнения и игнорируя шум. Положение источника можно оценить с помощью следующих уравнений:



Метод наименьших квадратов (LSM)
Метод наименьших квадратов (LSM) - это немного сложный алгоритм локализации запаха. LSM-версия модели отслеживания запаха представлена:

куда - евклидово расстояние между сенсорным узлом и источником шлейфа, определяемое по формуле:


Основное отличие алгоритма LSM от метода прямой триангуляции - это шум. В LSM учитывается шум, и местоположение источника запаха оценивается путем минимизации квадратичной ошибки. Нелинейная задача наименьших квадратов задается следующим образом:

куда - предполагаемое местоположение источника и это среднее значение нескольких измерений на датчиках, определяемое по формуле:



Оценка максимального правдоподобия (MLE)
Другой метод, основанный на моделировании шлейфа, - это оценка максимального правдоподобия (MLE). В этом методе локализации запаха несколько матриц определяются следующим образом:
![{displaystyle Z = [{frac {R_ {1} -mu _ {1}} {sigma _ {1}}}, {frac {R_ {2} -mu _ {2}} {sigma _ {2}}} , ... {frac {R_ {N} -mu _ {N}} {sigma _ {N}}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cd5e365504e8acb95fd65d9da0849d8fd86b53f5)
![{displaystyle G = diag [{frac {gamma _ {1}} {sigma _ {1}}}, {frac {gamma _ {2}} {sigma _ {2}}}, ... {frac {gamma _] {N}} {sigma _ {N}}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8223dad3dae108b8f0ff13d99944f03b42dd17a4)
![{displaystyle D = [{frac {1} {d_ {1} ^ {2}}}, {frac {1} {d_ {2} ^ {2}}}, ... {frac {1} {d_ { N} ^ {2}}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ad583fd563c7081bef2e6cf4bc4ce04f49de9f62)
![{displaystyle zeta = [zeta _ {1}, zeta _ {2}, ... zeta _ {N}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f54def9ab385afd74efefb490f0a038c45cc8ae5)


С помощью этих матриц модель обнаружения запаха на основе шлейфа может быть выражена следующим уравнением:

Затем MLE может быть применен к моделированию и сформировать функцию плотности вероятности

куда - предполагаемое положение источника запаха, а логарифмическая функция правдоподобия


Оценка параметра максимального правдоподобия можно рассчитать путем минимизации

а точное положение источника запаха можно оценить, решив:

Смотрите также
Рекомендации
- ^ а б «Спецвыпуск по машинному обонянию». Журнал датчиков IEEE. 11 (12): 3486. 2011. Bibcode:2011ISenJ..11.3486.. Дои:10.1109 / JSEN.2011.2167171.
- ^ а б Геффен, Воутер Х. ван; Брюинз, Марсель; Kerstjens, Huib A. M. (01.01.2016). «Диагностика вирусных и бактериальных респираторных инфекций при обострениях ХОБЛ с помощью электронного носа: пилотное исследование». Журнал исследования дыхания. 10 (3): 036001. Bibcode:2016JBR .... 10c6001V. Дои:10.1088/1752-7155/10/3/036001. ISSN 1752-7163. PMID 27310311.
- ^ Стассен, I .; Bueken, B .; Reinsch, H .; Oudenhoven, J. F. M .; Wouters, D .; Hajek, J .; Ван Спейбрук, В .; Шток, шт .; Vereecken, P.M .; Van Schaijk, R .; De Vos, D .; Амелут, Р. (2016). «К полевым химическим сенсорам на основе металлоорганических каркасов: UiO-66-NH2 для обнаружения нервно-паралитического агента ». Chem. Наука. 7 (9): 5827–5832. Дои:10.1039 / C6SC00987E. HDL:1854 / LU-8157872. ЧВК 6024240. PMID 30034722.
- ^ Гутьеррес-Осуна Р. (2002). «Анализ паттернов для машинного обоняния: обзор». Журнал датчиков IEEE. 2 (3): 189–202. Bibcode:2002ISenJ ... 2..189G. Дои:10.1109 / jsen.2002.800688.
- ^ Фейсангиттисагуль, Экачай; Нэгл, Х. Трой (2011). «Прогнозирование реакции запаховой смеси на датчики обоняния машины». Датчики и исполнительные механизмы B: химические. 155 (2): 473–482. Дои:10.1016 / j.snb.2010.12.049.
- ^ Вембу, Шанкар; Вергара, Александр; Муеззиноглу, Мехмет К .; Уэрта, Рамон (2012). «Об особенностях временных рядов и ядрах для машинного обоняния». Датчики и исполнительные механизмы B: химические. 174: 535–546. Дои:10.1016 / j.snb.2012.06.070.
- ^ Раман, Баранидхаран (декабрь 2005 г.). Сенсорное машинное обоняние с нейроморфными моделями обонятельной системы (Кандидат наук). Техасский университет A&M. HDL:1969.1/4984.
- ^ Мошаеди, Ата Джахангир. "Обзор: Аспект робота локализации запаха и препятствия". www.academia.edu. Получено 2015-11-12.
- ^ Гарднер, Джулиан У .; Бартлетт, Филип Н. (1994-03-01). «Краткая история электронных носов». Датчики и исполнительные механизмы B: химические. 18 (1–3): 210–211. Дои:10.1016/0925-4005(94)87085-3.(требуется подписка)
- ^ Ларкомб, М. Х. Э. (1984). Робототехника в ядерной технике: дистанционное управление с помощью компьютера в опасных средах с особым упором на радиационные поля.
- ^ Ковадло, Гидеон; Рассел, Р. Эндрю (2008-08-01). «Локализация запаха роботов: систематика и обзор». Международный журнал исследований робототехники. 27 (8): 869–894. Дои:10.1177/0278364908095118. ISSN 0278-3649.
- ^ а б c Рассел, Р. Эндрю (2004-01-01). «Роботизированная локация подземных химических источников». Роботика. 22 (1): 109–115. Дои:10.1017 / S026357470300540X. ISSN 1469-8668.
- ^ «Местоположение химического источника и проект RoboMole» (PDF).
- ^ «Исследование: локализация источника запаха» (PDF).
внешняя ссылка
- Electronic Nose Technologies от Scensive Technologies Ltd, Великобритания
- T. C. Pearce, S. S. Schiffman, H. T. Nagle, J. W. Gardner (редакторы), Handbook of Machine Olfaction: Electronic Nose Technology, Wiley-VCH, Weinheim, 2002. В формате PDF по адресу: [1]
- Сеть по искусственному обонятельному зондированию (NOSE) Архив
- Искусственные носы - изобразите запах, nature.com