Метастабильность (электроника) - Википедия - Metastability (electronics)

Метастабильность в электронике это способность цифровая электроника система сохраняться неограниченное время в неустойчивое равновесие или же метастабильный государственный.[1]В цифровых логических схемах цифровой сигнал должен находиться в определенных пределах напряжения или тока, чтобы представлять «0» или «1» логический уровень для правильной работы схемы; если сигнал находится в запрещенном промежуточном диапазоне, это может вызвать неправильное поведение логических элементов, к которым применяется сигнал. В метастабильных состояниях схема может быть неспособна перейти на стабильный логический уровень «0» или «1» за время, необходимое для правильной работы схемы. В результате схема может действовать непредсказуемым образом и может привести к сбою системы, который иногда называют «сбоем».[2] Метастабильность - это пример Буриданова задница парадокс.
Метастабильные состояния - неотъемлемые черты асинхронные цифровые системы, и систем с более чем одним независимым Часы домен. В самосинхронных асинхронных системах арбитры предназначены для того, чтобы позволить системе продолжить работу только после разрешения метастабильности, поэтому метастабильность является нормальным состоянием, а не ошибкой.[3]В синхронных системах с асинхронными входами синхронизаторы спроектированы таким образом, чтобы вероятность сбоя синхронизации была достаточно низкой.[4] В полностью синхронных системах метастабильных состояний можно избежать, если на входе время установки и удержания требования к шлепанцам выполнены.
Пример

Простой пример метастабильности можно найти в Защелка SR NOR, когда обе Входы Set и Reset являются истинными (R = 1 и S = 1), а затем оба переходят в false (R = 0 и S = 0) примерно в одно и то же время. Оба выхода Q и Q изначально удерживаются на 0 одновременными входами Set и Reset. После того, как оба входа Set и Reset изменятся на false, триггер (в конечном итоге) перейдет в одно из двух стабильных состояний: Q и Q истина, а другая ложь. Конечное состояние будет зависеть от того, какой из R или S возвращается к нулю первым в хронологическом порядке, но если оба переходят примерно в одно и то же время, результирующая метастабильность с промежуточными или колебательными уровнями выходного сигнала может занять сколь угодно много времени, чтобы перейти в стабильное состояние.
Арбитры
В электронике арбитр представляет собой схему, предназначенную для определения, какой из нескольких сигналов поступит первым. Арбитры используются в асинхронных цепях для упорядочивания вычислительных действий для общих ресурсов для предотвращения одновременных некорректных операций. Арбитры используются на входах полностью синхронных систем, а также между доменами часов, так как синхронизаторы для входных сигналов. Хотя они могут минимизировать возникновение метастабильности до очень низкой вероятности, все арбитры, тем не менее, имеют метастабильные состояния, которые неизбежны на границах областей ввода пространство состояний что приводит к разным результатам.[5]
Синхронные схемы
Синхронная схема Методы проектирования делают цифровые схемы устойчивыми к режимам отказа, которые могут быть вызваны метастабильностью. А часовой домен определяется как группа триггеров с общими часами. Такие архитектуры могут формировать схему, гарантированно свободную от метастабильности (ниже определенной максимальной тактовой частоты, выше которой происходит сначала метастабильность, а затем полный отказ), предполагая низкий уровеньперекос общие часы. Однако даже в этом случае, если система зависит от любых непрерывных входов, они, вероятно, будут уязвимы для метастабильных состояний.[6]
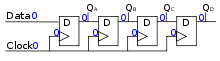
Когда используются методы синхронного проектирования, защита от метастабильных событий, вызывающих сбои системы, должна быть обеспечена только при передаче данных между разными доменами часов или из не синхронизированной области в синхронную систему. Эта защита часто может принимать форму серии шлепанцы с задержкой которые задерживают поток данных достаточно долго, чтобы сбои метастабильности происходили с незначительной скоростью.
Режимы отказа
Хотя метастабильность хорошо изучена и известны архитектурные методы управления ею, она сохраняется как режим отказа в оборудовании.
Серьезный компьютер и цифровое оборудование Ошибки, вызванные метастабильностью, имеют интересную социальную историю. Многие инженеры отказывались верить, что бистабильный устройство может войти в состояние, которое ни истинный ни ложный и имеет положительную вероятность того, что он останется неопределенным в течение любого заданного периода времени, хотя и с экспоненциально убывающей вероятностью с течением времени.[7][8][9][10][11] Однако метастабильность - это неизбежный результат любой попытки отобразить непрерывную область в дискретную. На границах в непрерывной области между регионами, которые отображаются на разные дискретные выходы, точки, произвольно близко расположенные друг к другу в непрерывной области, отображаются на разные выходы, принимая решение о том, какой выход выбрать для сложного и потенциально длительного процесса.[12] Если входные данные для арбитра или триггера поступают почти одновременно, схема, скорее всего, пересечет точку метастабильности. Метастабильность остается плохо изученной в некоторых кругах, и различные инженеры предложили свои собственные схемы, которые, как говорят, решают или отфильтровывают метастабильность; обычно эти схемы просто переносят возникновение метастабильности из одного места в другое.[13] Микросхемы, использующие несколько источников синхронизации, часто тестируются с тестовыми часами, которые имеют фиксированное фазовое соотношение, а не с независимыми часами, проходящими мимо друг друга, которые будут наблюдаться во время работы. Обычно это явно предотвращает обнаружение или сообщение о метастабильном режиме отказа, который может произойти в полевых условиях. При правильном тестировании на метастабильность часто используются часы с немного разными частотами, что обеспечивает правильную работу схемы.
Смотрите также
- Аналого-цифровой преобразователь
- Буриданова задница
- Асинхронный ЦП
- Отскок от земли
- Логика трех состояний
Рекомендации
- ^ Томас Дж. Чейни и Чарльз Э. Мольнар (Апрель 1973 г.). «Аномальное поведение цепей синхронизатора и арбитра» (PDF). Транзакции IEEE на компьютерах. С-22 (4): 421–422. Дои:10.1109 / T-C.1973.223730. ISSN 0018-9340.
- ^ Чейни, Томас Дж. «Моя работа над всеми метастабильными объектами ИЛИ Я и мой сбой» (PDF). Архивировано из оригинал (PDF) на 2015-12-08. Получено 2015-11-05.
- ^ Джон Бейнбридж (2002). Асинхронное межсоединение системы на кристалле. Springer. п. 18. ISBN 978-1-85233-598-4.
- ^ Чейни, Томас Дж. ""Перепечатка Технического меморандума № 10 "Феномен сбоя" (1966 г.)"".Вашингтонский университет Сент-Луис, Миссури
- ^ Ричард Ф. Тиндер (2009). Проектирование и анализ асинхронных последовательных машин: всестороннее развитие дизайна и анализа не зависящих от тактовых импульсов конечных автоматов и систем. Издатели Morgan & Claypool. п. 165. ISBN 978-1-59829-689-1.
- ^ Kleeman, L .; Кантони, А. "Метастабильное поведение в цифровых системах" декабрь 1987 г. ". Дизайн и тестирование компьютеров IEEE. 4 (6): 4–19. Дои:10.1109 / MDT.1987.295189.
- ^ Харрис, Сара; Харрис, Дэвид (2015). Цифровой дизайн и компьютерная архитектура: ARM Edition. Морган Кауфманн. С. 151–153. ISBN 012800911X.
- ^ Гиносар, Ран (2011). «Метастабильность и синхронизаторы: учебное пособие» (PDF). Центр исследования систем СБИС. Отделение электротехники и информатики, Технион - Израильский технологический институт, Хайфа., п. 4-6
- ^ Ксантопулос, Фукидид (2009). Тактирование в современных системах СБИС. Springer Science and Business Media. п. 196. ISBN 1441902619., п. 196, 200, ур. 6–29
- ^ «Праймер для метастабильности» (PDF). Указания по применению AN-219. Филлипс Полупроводник. 1989 г.. Получено 2017-01-20.
- ^ Арора, Мохит (2011). Искусство аппаратной архитектуры: методы и приемы проектирования цифровых схем. Springer Science and Business Media. ISBN 1461403979., п. 4-5, ур. 1-1
- ^ Лесли Лэмпорт (Февраль 2012 г.) [декабрь 1984 г.]. «Принцип Буридана» (PDF). Получено 2010-07-09.
- ^ Ран Гиносар. "Четырнадцать способов обмануть ваш синхронизатор «ASYNC 2003.
внешняя ссылка
- Метастабильность тактовых FIFO
- "Асинхронная" библиография
- Асинхронная логика
- Эффективные самосинхронные интерфейсы для пересечения доменов часов
- Доктор Ховард Джонсон: Умышленное создание метастабильного состояния
- Подробные объяснения и конструкции синхронизатора
- Библиография по метастабильности
- Пересечение тактовой области: замыкание петли на проблемах функциональной реализации тактовой области, Системы дизайна Cadence
- Стивенсон, Дженнифер. Понимание метастабильности в ПЛИС. Официальный документ корпорации Altera. Июль 2009 г.
- Бахуханди, Аширвад. Метастабильность. Конспект лекций по продвинутой логике и теории коммутации. Январь 2002 г.
- Каммингс, Клиффорд Э. Методы синтеза и написания сценариев для проектирования многоасинхронных часов. SNUG 2001.
- Хазелофф, Эйльхард. Метастабильный отклик в логических цепях 5 В. Отчет Texas Instruments. Февраль 1997 г.
- Нистром, Мика и Ален Дж. Мартин. Преодоление синхронного асинхронного разрыва. WCED 2002.
- Патил, Гириш, подразделение БМП, Cadence Design Systems. Проблемы синхронизации часов и методы статической проверки. Техническая конференция Cadence 2004.
- Смит, Майкл Джон Себастьян. Интегральные схемы для конкретных приложений. Эддисон Уэсли Лонгман, 1997, Глава 6.4.1.
- Штейн, Майк. Переход через пропасть: асинхронные сигналы в синхронном мире Конструктивная особенность EDN. 24 июля 2003 г.
- Кокс, Джером Р. и Энгель, Джордж Л., Blendics, Inc. Белая книга [1] «Метастабильность и фатальные системные ошибки»] ноябрь 2010 г.
- Адам Тейлор, "Обволакивать свой мозг метастабильностью", EE Times, 2013-11-20