Изгиб круглой пластины с кромочным зажимом под действием поперечного давления. Левая половина пластины показывает деформированную форму, а правая половина - недеформированную. Этот расчет был выполнен с использованием
ANSYS .
Гибка плит , или же гибка пластин , относится к отклонение из пластина перпендикулярно плоскости пластины под действием внешних силы и моменты . Величину прогиба можно определить, решив дифференциальные уравнения соответствующего теория пластин . В подчеркивает в пластине можно рассчитать по этим прогибам. Как только напряжения известны, теории неудач может использоваться для определения того, выйдет ли из строя плита при данной нагрузке.
Гибка пластин Кирхгофа-Лява Силы и моменты на плоской пластине.
Определения Для тонкой прямоугольной пластины толщиной ЧАС { displaystyle H} Модуль для младших E { displaystyle E} Коэффициент Пуассона ν { displaystyle nu} ш { displaystyle w}
В жесткость на изгиб дан кем-то
D = E ЧАС 3 12 ( 1 − ν 2 ) { displaystyle D = { frac {EH ^ {3}} {12 left (1- nu ^ {2} right)}}} Моменты В изгибающие моменты на единицу длины даются
M Икс = − D ( ∂ 2 ш ∂ Икс 2 + ν ∂ 2 ш ∂ у 2 ) { Displaystyle M_ {x} = - D left ({ frac { partial ^ {2} w} { partial x ^ {2}}} + nu { frac { partial ^ {2} w} { partial y ^ {2}}} right)} M у = − D ( ν ∂ 2 ш ∂ Икс 2 + ∂ 2 ш ∂ у 2 ) { displaystyle M_ {y} = - D left ( nu { frac { partial ^ {2} w} { partial x ^ {2}}} + { frac { partial ^ {2} w} { partial y ^ {2}}} right)} В крутящий момент на единицу длины определяется выражением
M Икс у = − D ( 1 − ν ) ∂ 2 ш ∂ Икс ∂ у { displaystyle M_ {xy} = - D left (1- nu right) { frac { partial ^ {2} w} { partial x partial y}}} Силы В поперечные силы на единицу длины даются
Q Икс = − D ∂ ∂ Икс ( ∂ 2 ш ∂ Икс 2 + ∂ 2 ш ∂ у 2 ) { displaystyle Q_ {x} = - D { frac { partial} { partial x}} left ({ frac { partial ^ {2} w} { partial x ^ {2}}} + { frac { partial ^ {2} w} { partial y ^ {2}}} right)} Q у = − D ∂ ∂ у ( ∂ 2 ш ∂ Икс 2 + ∂ 2 ш ∂ у 2 ) { displaystyle Q_ {y} = - D { frac { partial} { partial y}} left ({ frac { partial ^ {2} w} { partial x ^ {2}}} + { frac { partial ^ {2} w} { partial y ^ {2}}} right)} Стрессы Изгиб подчеркивает даны
σ Икс = − 12 D z ЧАС 3 ( ∂ 2 ш ∂ Икс 2 + ν ∂ 2 ш ∂ у 2 ) { displaystyle sigma _ {x} = - { frac {12Dz} {H ^ {3}}} left ({ frac { partial ^ {2} w} { partial x ^ {2}}} + nu { frac { partial ^ {2} w} { partial y ^ {2}}} right)} σ у = − 12 D z ЧАС 3 ( ν ∂ 2 ш ∂ Икс 2 + ∂ 2 ш ∂ у 2 ) { displaystyle sigma _ {y} = - { frac {12Dz} {H ^ {3}}} left ( nu { frac { partial ^ {2} w} { partial x ^ {2} }} + { frac { partial ^ {2} w} { partial y ^ {2}}} right)} В напряжение сдвига дан кем-то
τ Икс у = − 12 D z ЧАС 3 ( 1 − ν ) ∂ 2 ш ∂ Икс ∂ у { displaystyle tau _ {xy} = - { frac {12Dz} {H ^ {3}}} left (1- nu right) { frac { partial ^ {2} w} { partial х частичный у}}} Штаммы В деформации изгиба для теории малого прогиба даются
ϵ Икс = ∂ ты ∂ Икс = − z ∂ 2 ш ∂ Икс 2 { displaystyle epsilon _ {x} = { frac { partial u} { partial x}} = - z { frac { partial ^ {2} w} { partial x ^ {2}}}} ϵ у = ∂ v ∂ у = − z ∂ 2 ш ∂ у 2 { displaystyle epsilon _ {y} = { frac { partial v} { partial y}} = - z { frac { partial ^ {2} w} { partial y ^ {2}}}} В деформация сдвига для теории малых прогибов дается формулой
γ Икс у = ∂ ты ∂ у + ∂ v ∂ Икс = − 2 z ∂ 2 ш ∂ Икс ∂ у { displaystyle gamma _ {xy} = { frac { partial u} { partial y}} + { frac { partial v} { partial x}} = - 2z { frac { partial ^ { 2} w} { partial x partial y}}} Для теории больших отклоняющих пластин мы рассматриваем учет деформаций мембран
ϵ Икс = ∂ ты ∂ Икс + 1 2 ( ∂ ш ∂ Икс ) 2 { displaystyle epsilon _ {x} = { frac { partial u} { partial x}} + { frac {1} {2}} left ({ frac { partial w} { partial x }} right) ^ {2}} ϵ у = ∂ v ∂ у + 1 2 ( ∂ ш ∂ у ) 2 { displaystyle epsilon _ {y} = { frac { partial v} { partial y}} + { frac {1} {2}} left ({ frac { partial w} { partial y }} right) ^ {2}} γ Икс у = ∂ ты ∂ у + ∂ v ∂ Икс + ∂ ш ∂ Икс ∂ ш ∂ у { displaystyle gamma _ {xy} = { frac { partial u} { partial y}} + { frac { partial v} { partial x}} + { frac { partial w} { частичный x}} { frac { partial w} { partial y}}} Прогибы В отклонения даны
ты = − z ∂ ш ∂ Икс { displaystyle u = -z { frac { partial w} { partial x}}} v = − z ∂ ш ∂ у { displaystyle v = -z { frac { partial w} { partial y}}} Вывод в Теория пластин Кирхгофа – Лява для пластин определяющими уравнениями являются[1]
N α β , α = 0 { Displaystyle N _ { альфа бета, альфа} = 0} и
M α β , α β − q = 0 { Displaystyle М _ { альфа бета, альфа бета} -q = 0} В развернутом виде
∂ N 11 ∂ Икс 1 + ∂ N 21 ∂ Икс 2 = 0 ; ∂ N 12 ∂ Икс 1 + ∂ N 22 ∂ Икс 2 = 0 { displaystyle { cfrac { partial N_ {11}} { partial x_ {1}}} + { cfrac { partial N_ {21}} { partial x_ {2}}} = 0 ~; ~~ { cfrac { partial N_ {12}} { partial x_ {1}}} + { cfrac { partial N_ {22}} { partial x_ {2}}} = 0} и
∂ 2 M 11 ∂ Икс 1 2 + 2 ∂ 2 M 12 ∂ Икс 1 ∂ Икс 2 + ∂ 2 M 22 ∂ Икс 2 2 = q { displaystyle { cfrac { partial ^ {2} M_ {11}} { partial x_ {1} ^ {2}}} + 2 { cfrac { partial ^ {2} M_ {12}} { частичный x_ {1} partial x_ {2}}} + { cfrac { partial ^ {2} M_ {22}} { partial x_ {2} ^ {2}}} = q} куда q ( Икс ) { displaystyle q (x)} нагрузка на единицу площади толщина пластины составляет ЧАС = 2 час { displaystyle H = 2h} σ я j { displaystyle sigma _ {ij}}
N α β := ∫ − час час σ α β d Икс 3 ; M α β := ∫ − час час Икс 3 σ α β d Икс 3 . { displaystyle N _ { alpha beta}: = int _ {- h} ^ {h} sigma _ { alpha beta} ~ dx_ {3} ~; ~~ M _ { alpha beta}: = int _ {- h} ^ {h} x_ {3} ~ sigma _ { alpha beta} ~ dx_ {3} ~.} Количество N { displaystyle N} сила на единицу длины. Количество M { displaystyle M} момент на единицу длины.
За изотропный , однородный , тарелки с Модуль для младших E { displaystyle E} Коэффициент Пуассона ν { displaystyle nu} [2]
∇ 2 ∇ 2 ш = − q D ; D := 2 час 3 E 3 ( 1 − ν 2 ) = ЧАС 3 E 12 ( 1 − ν 2 ) { displaystyle nabla ^ {2} nabla ^ {2} w = - { cfrac {q} {D}} ~; ~~ D: = { cfrac {2h ^ {3} E} {3 (1 - nu ^ {2})}} = { cfrac {H ^ {3} E} {12 (1- nu ^ {2})}}} куда ш ( Икс 1 , Икс 2 ) { Displaystyle ш (х_ {1}, х_ {2})}
Небольшой прогиб тонких прямоугольных пластин Это регулируется Жермен -Лагранж уравнение пластины
∂ 4 ш ∂ Икс 4 + 2 ∂ 4 ш ∂ Икс 2 ∂ у 2 + ∂ 4 ш ∂ у 4 = q D { displaystyle { cfrac { partial ^ {4} w} { partial x ^ {4}}} + 2 { cfrac { partial ^ {4} w} { partial x ^ {2} partial y ^ {2}}} + { cfrac { partial ^ {4} w} { partial y ^ {4}}} = { cfrac {q} {D}}} Это уравнение было впервые выведено Лагранжем в декабре 1811 г. при исправлении работы Жермена, который лег в основу теории.
Большой прогиб тонких прямоугольных пластин Это регулируется Föppl –фон Карман уравнения пластины
∂ 4 F ∂ Икс 4 + 2 ∂ 4 F ∂ Икс 2 ∂ у 2 + ∂ 4 F ∂ у 4 = E [ ( ∂ 2 ш ∂ Икс ∂ у ) 2 − ∂ 2 ш ∂ Икс 2 ∂ 2 ш ∂ у 2 ] { Displaystyle { cfrac { partial ^ {4} F} { partial x ^ {4}}} + 2 { cfrac { partial ^ {4} F} { partial x ^ {2} partial y ^ {2}}} + { cfrac { partial ^ {4} F} { partial y ^ {4}}} = E left [ left ({ cfrac { partial ^ {2} w} { partial x partial y}} right) ^ {2} - { cfrac { partial ^ {2} w} { partial x ^ {2}}} { cfrac { partial ^ {2} w} { partial y ^ {2}}} right]} ∂ 4 ш ∂ Икс 4 + 2 ∂ 4 ш ∂ Икс 2 ∂ у 2 + ∂ 4 ш ∂ у 4 = q D + ЧАС D ( ∂ 2 F ∂ у 2 ∂ 2 ш ∂ Икс 2 + ∂ 2 F ∂ Икс 2 ∂ 2 ш ∂ у 2 − 2 ∂ 2 F ∂ Икс ∂ у ∂ 2 ш ∂ Икс ∂ у ) { displaystyle { cfrac { partial ^ {4} w} { partial x ^ {4}}} + 2 { cfrac { partial ^ {4} w} { partial x ^ {2} partial y ^ {2}}} + { cfrac { partial ^ {4} w} { partial y ^ {4}}} = { cfrac {q} {D}} + { cfrac {H} {D} } left ({ cfrac { partial ^ {2} F} { partial y ^ {2}}} { cfrac { partial ^ {2} w} { partial x ^ {2}}} + { cfrac { partial ^ {2} F} { partial x ^ {2}}} { cfrac { partial ^ {2} w} { partial y ^ {2}}} - 2 { cfrac { partial ^ {2} F} { partial x partial y}} { cfrac { partial ^ {2} w} { partial x partial y}} right)} куда F { displaystyle F}
Круглые тарелки Кирхгофа-Лява Изгиб круглых пластин можно исследовать, решив основное уравнение с соответствующими граничными условиями. Эти решения были впервые найдены Пуассоном в 1829 г. Для таких задач удобны цилиндрические координаты. Здесь z { displaystyle z}
Основное уравнение в безкоординатной форме имеет вид
∇ 2 ∇ 2 ш = − q D . { displaystyle nabla ^ {2} nabla ^ {2} w = - { frac {q} {D}} ,.} В цилиндрических координатах ( р , θ , z ) { Displaystyle (г, тета, г)}
∇ 2 ш ≡ 1 р ∂ ∂ р ( р ∂ ш ∂ р ) + 1 р 2 ∂ 2 ш ∂ θ 2 + ∂ 2 ш ∂ z 2 . { displaystyle nabla ^ {2} w Equiv { frac {1} {r}} { frac { partial} { partial r}} left (r { frac { partial w} { partial r}} right) + { frac {1} {r ^ {2}}} { frac { partial ^ {2} w} { partial theta ^ {2}}} + { frac { частичный ^ {2} w} { partial z ^ {2}}} ,.} Для симметрично нагруженных круглых пластин ш = ш ( р ) { Displaystyle ш = ш (г)}
∇ 2 ш ≡ 1 р d d р ( р d ш d р ) . { displaystyle nabla ^ {2} w Equiv { frac {1} {r}} { cfrac {d} {dr}} left (r { cfrac {dw} {dr}} right) ,.} Следовательно, основное уравнение
1 р d d р [ р d d р { 1 р d d р ( р d ш d р ) } ] = − q D . { displaystyle { frac {1} {r}} { cfrac {d} {dr}} left [r { cfrac {d} {dr}} left {{ frac {1} {r} } { cfrac {d} {dr}} left (r { cfrac {dw} {dr}} right) right } right] = - { frac {q} {D}} ,. } Если q { displaystyle q} D { displaystyle D}
ш ( р ) = − q р 4 64 D + C 1 пер р + C 2 р 2 2 + C 3 р 2 4 ( 2 пер р − 1 ) + C 4 { displaystyle w (r) = - { frac {qr ^ {4}} {64D}} + C_ {1} ln r + { cfrac {C_ {2} r ^ {2}} {2}} + { cfrac {C_ {3} r ^ {2}} {4}} (2 ln r-1) + C_ {4}} куда C я { displaystyle C_ {i}}
ϕ ( р ) = d ш d р = − q р 3 16 D + C 1 р + C 2 р + C 3 р пер р . { displaystyle phi (r) = { cfrac {dw} {dr}} = - { frac {qr ^ {3}} {16D}} + { frac {C_ {1}} {r}} + C_ {2} r + C_ {3} r ln r ,.} Для круглой пластины требование конечности прогиба и крутизны прогиба при р = 0 { displaystyle r = 0} C 1 = 0 { displaystyle C_ {1} = 0} C 3 { displaystyle C_ {3}} р пер р { Displaystyle г ln г ,} р = 0 { displaystyle r = 0}
Зажатые края Для круглой пластины с зажатыми краями имеем ш ( а ) = 0 { Displaystyle ш (а) = 0} ϕ ( а ) = 0 { Displaystyle phi (а) = 0} а { displaystyle a}
ш ( р ) = − q 64 D ( а 2 − р 2 ) 2 и ϕ ( р ) = q р 16 D ( а 2 − р 2 ) . { displaystyle w (r) = - { frac {q} {64D}} (a ^ {2} -r ^ {2}) ^ {2} quad { text {and}} quad phi ( r) = { frac {qr} {16D}} (a ^ {2} -r ^ {2}) ,.} Смещения в плоскости пластины равны
ты р ( р ) = − z ϕ ( р ) и ты θ ( р ) = 0 . { displaystyle u_ {r} (r) = - z phi (r) quad { text {and}} quad u _ { theta} (r) = 0 ,.} Плоские деформации в пластине равны
ε р р = d ты р d р = − q z 16 D ( а 2 − 3 р 2 ) , ε θ θ = ты р р = − q z 16 D ( а 2 − р 2 ) , ε р θ = 0 . { displaystyle varepsilon _ {rr} = { cfrac {du_ {r}} {dr}} = - { frac {qz} {16D}} (a ^ {2} -3r ^ {2}) ~, ~~ varepsilon _ { theta theta} = { frac {u_ {r}} {r}} = - { frac {qz} {16D}} (a ^ {2} -r ^ {2}) ~, ~~ varepsilon _ {r theta} = 0 ,.} Напряжения в плоскости пластины равны
σ р р = E 1 − ν 2 [ ε р р + ν ε θ θ ] ; σ θ θ = E 1 − ν 2 [ ε θ θ + ν ε р р ] ; σ р θ = 0 . { displaystyle sigma _ {rr} = { frac {E} {1- nu ^ {2}}} left [ varepsilon _ {rr} + nu varepsilon _ { theta theta} right ] ~; ~~ sigma _ { theta theta} = { frac {E} {1- nu ^ {2}}} left [ varepsilon _ { theta theta} + nu varepsilon _ {rr} right] ~; ~~ sigma _ {r theta} = 0 ,.} Для плиты толщиной 2 час { displaystyle 2h} D = 2 E час 3 / [ 3 ( 1 − ν 2 ) ] { Displaystyle D = 2Eh ^ {3} / [3 (1- nu ^ {2})]}
σ р р = − 3 q z 32 час 3 [ ( 1 + ν ) а 2 − ( 3 + ν ) р 2 ] σ θ θ = − 3 q z 32 час 3 [ ( 1 + ν ) а 2 − ( 1 + 3 ν ) р 2 ] σ р θ = 0 . { displaystyle { begin {align} sigma _ {rr} & = - { frac {3qz} {32h ^ {3}}} left [(1+ nu) a ^ {2} - (3+ nu) r ^ {2} right] sigma _ { theta theta} & = - { frac {3qz} {32h ^ {3}}} left [(1+ nu) a ^ {2} - (1 + 3 nu) r ^ {2} right] sigma _ {r theta} & = 0 ,. End {align}}} Результирующие момента (изгибающие моменты) равны
M р р = − q 16 [ ( 1 + ν ) а 2 − ( 3 + ν ) р 2 ] ; M θ θ = − q 16 [ ( 1 + ν ) а 2 − ( 1 + 3 ν ) р 2 ] ; M р θ = 0 . { displaystyle M_ {rr} = - { frac {q} {16}} left [(1+ nu) a ^ {2} - (3+ nu) r ^ {2} right] ~; ~~ M _ { theta theta} = - { frac {q} {16}} left [(1+ nu) a ^ {2} - (1 + 3 nu) r ^ {2} right ] ~; ~~ M_ {r theta} = 0 ,.} Максимальное радиальное напряжение при z = час { displaystyle z = h} р = а { Displaystyle г = а}
σ р р | z = час , р = а = 3 q а 2 16 час 2 = 3 q а 2 4 ЧАС 2 { displaystyle left. sigma _ {rr} right | _ {z = h, r = a} = { frac {3qa ^ {2}} {16h ^ {2}}} = { frac {3qa ^ {2}} {4H ^ {2}}}} куда ЧАС := 2 час { displaystyle H: = 2h}
M р р | р = а = q а 2 8 , M θ θ | р = а = ν q а 2 8 , M р р | р = 0 = M θ θ | р = 0 = − ( 1 + ν ) q а 2 16 . { displaystyle left.M_ {rr} right | _ {r = a} = { frac {qa ^ {2}} {8}} ~, ~~ left.M _ { theta theta} right | _ {r = a} = { frac { nu qa ^ {2}} {8}} ~, ~~ left.M_ {rr} right | _ {r = 0} = left.M_ { theta theta} right | _ {r = 0} = - { frac {(1+ nu) qa ^ {2}} {16}} ,.} Прямоугольные тарелки Кирхгофа-Лява Изгиб прямоугольной пластины под действием распределенной силы
q { displaystyle q} на единицу площади.
Для прямоугольных пластин Навье в 1820 году ввел простой метод определения смещения и напряжения, когда пластина просто поддерживается. Идея заключалась в том, чтобы выразить приложенную нагрузку в терминах компонентов Фурье, найти решение для синусоидальной нагрузки (единственная составляющая Фурье), а затем наложить компоненты Фурье, чтобы получить решение для произвольной нагрузки.
Синусоидальная нагрузка Предположим, что нагрузка имеет вид
q ( Икс , у ) = q 0 грех π Икс а грех π у б . { displaystyle q (x, y) = q_ {0} sin { frac { pi x} {a}} sin { frac { pi y} {b}} ,.} Здесь q 0 { displaystyle q_ {0}} а { displaystyle a} Икс { displaystyle x} б { displaystyle b} у { displaystyle y}
Поскольку пластина просто поддерживается, смещение ш ( Икс , у ) { Displaystyle ш (х, у)} M Икс Икс { displaystyle M_ {xx}} Икс = 0 { displaystyle x = 0} Икс = а { Displaystyle х = а} M у у { displaystyle M_ {yy}} у = 0 { displaystyle y = 0} у = б { displaystyle y = b}
Если мы применим эти граничные условия и решим уравнение пластины, мы получим решение
ш ( Икс , у ) = q 0 π 4 D ( 1 а 2 + 1 б 2 ) − 2 грех π Икс а грех π у б . { displaystyle w (x, y) = { frac {q_ {0}} { pi ^ {4} D}} , left ({ frac {1} {a ^ {2}}} + { frac {1} {b ^ {2}}} right) ^ {- 2} , sin { frac { pi x} {a}} sin { frac { pi y} {b} } ,.} Где D - жесткость на изгиб
D = E т 3 12 ( 1 − ν 2 ) { Displaystyle D = { frac {Et ^ {3}} {12 (1- nu ^ {2})}}} Аналогично жесткости на изгиб EI.[3]
Для более общей загрузки формы
q ( Икс , у ) = q 0 грех м π Икс а грех п π у б { displaystyle q (x, y) = q_ {0} sin { frac {m pi x} {a}} sin { frac {n pi y} {b}}} куда м { displaystyle m} п { displaystyle n}
(1) ш ( Икс , у ) = q 0 π 4 D ( м 2 а 2 + п 2 б 2 ) − 2 грех м π Икс а грех п π у б . { displaystyle { text {(1)}} qquad w (x, y) = { frac {q_ {0}} { pi ^ {4} D}} , left ({ frac {m ^ {2}} {a ^ {2}}} + { frac {n ^ {2}} {b ^ {2}}} right) ^ {- 2} , sin { frac {m pi x} {a}} sin { frac {n pi y} {b}} ,.} Решение Навье Уравнение двойного тригонометрического ряда Определяем общую нагрузку q ( Икс , у ) { Displaystyle д (х, у)}
q ( Икс , у ) = ∑ м = 1 ∞ ∑ п = 1 ∞ а м п грех м π Икс а грех п π у б { displaystyle q (x, y) = sum _ {m = 1} ^ { infty} sum _ {n = 1} ^ { infty} a_ {mn} sin { frac {m pi x } {a}} sin { frac {n pi y} {b}}} куда а м п { displaystyle a_ {mn}}
а м п = 4 а б ∫ 0 б ∫ 0 а q ( Икс , у ) грех м π Икс а грех п π у б d Икс d у { displaystyle a_ {mn} = { frac {4} {ab}} int _ {0} ^ {b} int _ {0} ^ {a} q (x, y) sin { frac { m pi x} {a}} sin { frac {n pi y} {b}} , { text {d}} x { text {d}} y} Таким образом, классическое уравнение прямоугольной пластины для малых прогибов принимает следующий вид:
∂ 4 ш ∂ Икс 4 + 2 ∂ 4 ш ∂ Икс 2 ∂ у 2 + ∂ 4 ш ∂ у 4 = 1 D ∑ м = 1 ∞ ∑ п = 1 ∞ а м п грех м π Икс а грех п π у б { Displaystyle { cfrac { partial ^ {4} w} { partial x ^ {4}}} + 2 { cfrac { partial ^ {4} w} { partial x ^ {2} partial y ^ {2}}} + { cfrac { partial ^ {4} w} { partial y ^ {4}}} = { cfrac {1} {D}} sum _ {m = 1} ^ { infty} sum _ {n = 1} ^ { infty} a_ {mn} sin { frac {m pi x} {a}} sin { frac {n pi y} {b}} } Пластина с простой опорой и общей нагрузкой Мы предполагаем решение ш ( Икс , у ) { Displaystyle ш (х, у)}
ш ( Икс , у ) = ∑ м = 1 ∞ ∑ п = 1 ∞ ш м п грех м π Икс а грех п π у б { displaystyle w (x, y) = sum _ {m = 1} ^ { infty} sum _ {n = 1} ^ { infty} w_ {mn} sin { frac {m pi x } {a}} sin { frac {n pi y} {b}}} Частные дифференциалы этой функции даются выражениями
∂ 4 ш ∂ Икс 4 = ∑ м = 1 ∞ ∑ п = 1 ∞ ( м π а ) 4 ш м п грех м π Икс а грех п π у б { displaystyle { cfrac { partial ^ {4} w} { partial x ^ {4}}} = sum _ {m = 1} ^ { infty} sum _ {n = 1} ^ { infty} left ({ frac {m pi} {a}} right) ^ {4} w_ {mn} sin { frac {m pi x} {a}} sin { frac {n pi y} {b}}} ∂ 4 ш ∂ Икс 2 ∂ у 2 = ∑ м = 1 ∞ ∑ п = 1 ∞ ( м π а ) 2 ( п π б ) 2 ш м п грех м π Икс а грех п π у б { displaystyle { cfrac { partial ^ {4} w} { partial x ^ {2} partial y ^ {2}}} = sum _ {m = 1} ^ { infty} sum _ { n = 1} ^ { infty} left ({ frac {m pi} {a}} right) ^ {2} left ({ frac {n pi} {b}} right) ^ {2} w_ {mn} sin { frac {m pi x} {a}} sin { frac {n pi y} {b}}} ∂ 4 ш ∂ у 4 = ∑ м = 1 ∞ ∑ п = 1 ∞ ( п π б ) 4 ш м п грех м π Икс а грех п π у б { displaystyle { cfrac { partial ^ {4} w} { partial y ^ {4}}} = sum _ {m = 1} ^ { infty} sum _ {n = 1} ^ { infty} left ({ frac {n pi} {b}} right) ^ {4} w_ {mn} sin { frac {m pi x} {a}} sin { frac {n pi y} {b}}} Подставляя эти выражения в уравнение пластины, имеем
∑ м = 1 ∞ ∑ п = 1 ∞ ( ( м π а ) 2 + ( п π б ) 2 ) 2 ш м п грех м π Икс а грех п π у б = ∑ м = 1 ∞ ∑ п = 1 ∞ а м п D грех м π Икс а грех п π у б { displaystyle sum _ {m = 1} ^ { infty} sum _ {n = 1} ^ { infty} left ( left ({ frac {m pi} {a}} right) ^ {2} + left ({ frac {n pi} {b}} right) ^ {2} right) ^ {2} w_ {mn} sin { frac {m pi x} { a}} sin { frac {n pi y} {b}} = sum _ {m = 1} ^ { infty} sum _ {n = 1} ^ { infty} { cfrac {a_ {mn}} {D}} sin { frac {m pi x} {a}} sin { frac {n pi y} {b}}} Приравнивая два выражения, имеем
( ( м π а ) 2 + ( п π б ) 2 ) 2 ш м п = а м п D { displaystyle left ( left ({ frac {m pi} {a}} right) ^ {2} + left ({ frac {n pi} {b}} right) ^ {2 } right) ^ {2} w_ {mn} = { cfrac {a_ {mn}} {D}}} который можно переставить, чтобы получить
ш м п = 1 π 4 D а м п ( м 2 а 2 + п 2 б 2 ) 2 { displaystyle w_ {mn} = { frac {1} { pi ^ {4} D}} { frac {a_ {mn}} { left ({ frac {m ^ {2}} {a ^ {2}}} + { frac {n ^ {2}} {b ^ {2}}} right) ^ {2}}}} Прогиб свободно опертой пластины (углового происхождения) при общей нагрузке определяется выражением
ш ( Икс , у ) = 1 π 4 D ∑ м = 1 ∞ ∑ п = 1 ∞ а м п ( м 2 а 2 + п 2 б 2 ) 2 грех м π Икс а грех п π у б { displaystyle w (x, y) = { frac {1} { pi ^ {4} D}} sum _ {m = 1} ^ { infty} sum _ {n = 1} ^ { infty} { frac {a_ {mn}} { left ({ frac {m ^ {2}} {a ^ {2}}} + { frac {n ^ {2}} {b ^ {2}) }} right) ^ {2}}} sin { frac {m pi x} {a}} sin { frac {n pi y} {b}}} Пластина с простой опорой и равномерно распределенной нагрузкой Смещение (
ш { displaystyle w} )
Стресс (
σ Икс Икс { displaystyle sigma _ {xx}} )
Стресс (
σ у у { displaystyle sigma _ {yy}} )
Смещения и напряжения по
Икс = а / 2 { Displaystyle х = а / 2} для прямоугольной пластины с
а = 20 { displaystyle a = 20} мм,
б = 40 { displaystyle b = 40} мм,
ЧАС = 2 час = 0.4 { displaystyle H = 2h = 0,4} мм,
E = 70 { displaystyle E = 70} ГПа и
ν = 0.35 { displaystyle nu = 0,35} под нагрузкой
q 0 = − 10 { displaystyle q_ {0} = - 10} кПа. Красная линия представляет нижнюю часть тарелки, зеленая линия - середину, а синяя линия - верх тарелки.
Для равномерно распределенной нагрузки имеем
q ( Икс , у ) = q 0 { displaystyle q (x, y) = q_ {0}} Соответствующий коэффициент Фурье, таким образом, определяется выражением
а м п = 4 а б ∫ 0 а ∫ 0 б q 0 грех м π Икс а грех п π у б d Икс d у { displaystyle a_ {mn} = { frac {4} {ab}} int _ {0} ^ {a} int _ {0} ^ {b} q_ {0} sin { frac {m pi x} {a}} sin { frac {n pi y} {b}} , { text {d}} x { text {d}} y} Вычисляя двойной интеграл, имеем
а м п = 4 q 0 π 2 м п ( 1 − потому что м π ) ( 1 − потому что п π ) { displaystyle a_ {mn} = { frac {4q_ {0}} { pi ^ {2} mn}} (1- cos m pi) (1- cos n pi)} или, альтернативно, в кусочно формат, у нас есть
а м п = { 16 q 0 π 2 м п м и п странный 0 м или же п четное { displaystyle a_ {mn} = { begin {cases} { cfrac {16q_ {0}} { pi ^ {2} mn}} & m ~ { text {and}} ~ n ~ { text {odd }} 0 & m ~ { text {или}} ~ n ~ { text {even}} end {case}}} Прогиб свободно опертой пластины (имеющей угловое начало) с равномерно распределенной нагрузкой определяется выражением
ш ( Икс , у ) = 16 q 0 π 6 D ∑ м = 1 , 3 , 5 , . . . ∞ ∑ п = 1 , 3 , 5 , . . . ∞ 1 м п ( м 2 а 2 + п 2 б 2 ) 2 грех м π Икс а грех п π у б { displaystyle w (x, y) = { frac {16q_ {0}} { pi ^ {6} D}} sum _ {m = 1,3,5, ...} ^ { infty} sum _ {n = 1,3,5, ...} ^ { infty} { frac {1} {mn left ({ frac {m ^ {2}} {a ^ {2}}}) + { frac {n ^ {2}} {b ^ {2}}} right) ^ {2}}} sin { frac {m pi x} {a}} sin { frac {n pi y} {b}}} Изгибающие моменты на единицу длины в пластине определяются выражением
M Икс = 16 q 0 π 4 ∑ м = 1 , 3 , 5 , . . . ∞ ∑ п = 1 , 3 , 5 , . . . ∞ м 2 а 2 + ν п 2 б 2 м п ( м 2 а 2 + п 2 б 2 ) 2 грех м π Икс а грех п π у б { displaystyle M_ {x} = { frac {16q_ {0}} { pi ^ {4}}} sum _ {m = 1,3,5, ...} ^ { infty} sum _ {n = 1,3,5, ...} ^ { infty} { frac {{ frac {m ^ {2}} {a ^ {2}}} + nu { frac {n ^ { 2}} {b ^ {2}}}} {mn left ({ frac {m ^ {2}} {a ^ {2}}} + { frac {n ^ {2}} {b ^ { 2}}} right) ^ {2}}} sin { frac {m pi x} {a}} sin { frac {n pi y} {b}}} M у = 16 q 0 π 4 ∑ м = 1 , 3 , 5 , . . . ∞ ∑ п = 1 , 3 , 5 , . . . ∞ п 2 б 2 + ν м 2 а 2 м п ( м 2 а 2 + п 2 б 2 ) 2 грех м π Икс а грех п π у б { displaystyle M_ {y} = { frac {16q_ {0}} { pi ^ {4}}} sum _ {m = 1,3,5, ...} ^ { infty} sum _ {n = 1,3,5, ...} ^ { infty} { frac {{ frac {n ^ {2}} {b ^ {2}}} + nu { frac {m ^ { 2}} {a ^ {2}}}} {mn left ({ frac {m ^ {2}} {a ^ {2}}} + { frac {n ^ {2}} {b ^ { 2}}} right) ^ {2}}} sin { frac {m pi x} {a}} sin { frac {n pi y} {b}}} Леви решение Другой подход был предложен Леви [4] Y м ( у ) { displaystyle Y_ {m} (y)} у = 0 { displaystyle y = 0} у = б { displaystyle y = b} ∇ 2 ∇ 2 ш = q / D { Displaystyle nabla ^ {2} nabla ^ {2} ш = д / D}
Предположим, что
ш ( Икс , у ) = ∑ м = 1 ∞ Y м ( у ) грех м π Икс а . { displaystyle w (x, y) = sum _ {m = 1} ^ { infty} Y_ {m} (y) sin { frac {m pi x} {a}} ,.} Для пластины, которая легко опирается на Икс = 0 { displaystyle x = 0} Икс = а { Displaystyle х = а} ш = 0 { displaystyle w = 0} M Икс Икс = 0 { displaystyle M_ {xx} = 0} ∂ ш / ∂ у = 0 { displaystyle partial w / partial y = 0} ∂ 2 ш / ∂ у 2 = 0 { displaystyle partial ^ {2} w / partial y ^ {2} = 0} ∂ 2 ш / ∂ Икс 2 = 0 { displaystyle partial ^ {2} w / partial x ^ {2} = 0}
Моменты по краям Рассмотрим случай чисто моментной нагрузки. В таком случае q = 0 { displaystyle q = 0} ш ( Икс , у ) { Displaystyle ш (х, у)} ∇ 2 ∇ 2 ш = 0 { Displaystyle набла ^ {2} набла ^ {2} ш = 0}
∂ 4 ш ∂ Икс 4 + 2 ∂ 4 ш ∂ Икс 2 ∂ у 2 + ∂ 4 ш ∂ у 4 = 0 . { displaystyle { frac { partial ^ {4} w} { partial x ^ {4}}} + 2 { frac { partial ^ {4} w} { partial x ^ {2} partial y ^ {2}}} + { frac { partial ^ {4} w} { partial y ^ {4}}} = 0 ,.} Подключаем выражение для ш ( Икс , у ) { Displaystyle ш (х, у)}
∑ м = 1 ∞ [ ( м π а ) 4 Y м грех м π Икс а − 2 ( м π а ) 2 d 2 Y м d у 2 грех м π Икс а + d 4 Y м d у 4 грех м π Икс а ] = 0 { displaystyle sum _ {m = 1} ^ { infty} left [ left ({ frac {m pi} {a}} right) ^ {4} Y_ {m} sin { frac {m pi x} {a}} - 2 left ({ frac {m pi} {a}} right) ^ {2} { cfrac {d ^ {2} Y_ {m}} {dy ^ {2}}} sin { frac {m pi x} {a}} + { frac {d ^ {4} Y_ {m}} {dy ^ {4}}} sin { frac { m pi x} {a}} right] = 0} или же
d 4 Y м d у 4 − 2 м 2 π 2 а 2 d 2 Y м d у 2 + м 4 π 4 а 4 Y м = 0 . { displaystyle { frac {d ^ {4} Y_ {m}} {dy ^ {4}}} - 2 { frac {m ^ {2} pi ^ {2}} {a ^ {2}} } { cfrac {d ^ {2} Y_ {m}} {dy ^ {2}}} + { frac {m ^ {4} pi ^ {4}} {a ^ {4}}} Y_ { m} = 0 ,.} Это обыкновенное дифференциальное уравнение, имеющее общее решение
Y м = А м шиш м π у а + B м м π у а шиш м π у а + C м грех м π у а + D м м π у а грех м π у а { displaystyle Y_ {m} = A_ {m} cosh { frac {m pi y} {a}} + B_ {m} { frac {m pi y} {a}} cosh { frac {m pi y} {a}} + C_ {m} sinh { frac {m pi y} {a}} + D_ {m} { frac {m pi y} {a}} sinh { frac {m pi y} {a}}} куда А м , B м , C м , D м { displaystyle A_ {m}, B_ {m}, C_ {m}, D_ {m}}
ш ( Икс , у ) = ∑ м = 1 ∞ [ ( А м + B м м π у а ) шиш м π у а + ( C м + D м м π у а ) грех м π у а ] грех м π Икс а . { displaystyle w (x, y) = sum _ {m = 1} ^ { infty} left [ left (A_ {m} + B_ {m} { frac {m pi y} {a}) } right) cosh { frac {m pi y} {a}} + left (C_ {m} + D_ {m} { frac {m pi y} {a}} right) sinh { frac {m pi y} {a}} right] sin { frac {m pi x} {a}} ,.} Выберем систему координат так, чтобы границы пластины составляли Икс = 0 { displaystyle x = 0} Икс = а { Displaystyle х = а} у = ± б / 2 { displaystyle y = pm b / 2} у = 0 { displaystyle y = 0} у = б { displaystyle y = b} у = ± б / 2 { displaystyle y = pm b / 2}
ш = 0 , − D ∂ 2 ш ∂ у 2 | у = б / 2 = ж 1 ( Икс ) , − D ∂ 2 ш ∂ у 2 | у = − б / 2 = ж 2 ( Икс ) { displaystyle w = 0 ,, - D { frac { partial ^ {2} w} { partial y ^ {2}}} { Bigr |} _ {y = b / 2} = f_ {1 } (x) ,, - D { frac { partial ^ {2} w} { partial y ^ {2}}} { Bigr |} _ {y = -b / 2} = f_ {2} (Икс)} куда ж 1 ( Икс ) , ж 2 ( Икс ) { displaystyle f_ {1} (x), f_ {2} (x)} симметричный casewhere
M у у | у = − б / 2 = M у у | у = б / 2 { Displaystyle M_ {yy} { Bigr |} _ {y = -b / 2} = M_ {yy} { Bigr |} _ {y = b / 2}} и
ж 1 ( Икс ) = ж 2 ( Икс ) = ∑ м = 1 ∞ E м грех м π Икс а { displaystyle f_ {1} (x) = f_ {2} (x) = sum _ {m = 1} ^ { infty} E_ {m} sin { frac {m pi x} {a} }} у нас есть
ш ( Икс , у ) = а 2 2 π 2 D ∑ м = 1 ∞ E м м 2 шиш α м грех м π Икс а ( α м танх α м шиш м π у а − м π у а грех м π у а ) { displaystyle w (x, y) = { frac {a ^ {2}} {2 pi ^ {2} D}} sum _ {m = 1} ^ { infty} { frac {E_ { m}} {m ^ {2} cosh alpha _ {m}}} , sin { frac {m pi x} {a}} , left ( alpha _ {m} tanh альфа _ {m} ch { frac {m pi y} {a}} - { frac {m pi y} {a}} sinh { frac {m pi y} {a}} верно)} куда
α м = м π б 2 а . { displaystyle alpha _ {m} = { frac {m pi b} {2a}} ,.} Аналогично для антисимметричный случай, когда
M у у | у = − б / 2 = − M у у | у = б / 2 { Displaystyle M_ {yy} { Bigr |} _ {y = -b / 2} = - M_ {yy} { Bigr |} _ {y = b / 2}} у нас есть
ш ( Икс , у ) = а 2 2 π 2 D ∑ м = 1 ∞ E м м 2 грех α м грех м π Икс а ( α м кот α м грех м π у а − м π у а шиш м π у а ) . { displaystyle w (x, y) = { frac {a ^ {2}} {2 pi ^ {2} D}} sum _ {m = 1} ^ { infty} { frac {E_ { m}} {m ^ {2} sinh alpha _ {m}}} , sin { frac {m pi x} {a}} , left ( alpha _ {m} coth alpha _ {m} sinh { frac {m pi y} {a}} - { frac {m pi y} {a}} cosh { frac {m pi y} {a}} верно),.} Мы можем совмещать симметричные и антисимметричные решения, чтобы получить более общие решения.
Пластина с простой опорой и равномерно распределенной нагрузкой Для равномерно распределенной нагрузки имеем
q ( Икс , у ) = q 0 { displaystyle q (x, y) = q_ {0}} Прогиб просто поддерживаемой пластины с центром ( а 2 , 0 ) { displaystyle left ({ frac {a} {2}}, 0 right)}
ш ( Икс , у ) = q 0 а 4 D ∑ м = 1 , 3 , 5 , . . . ∞ ( А м шиш м π у а + B м м π у а грех м π у а + грамм м ) грех м π Икс а куда А м = − 2 ( α м танх α м + 2 ) π 5 м 5 шиш α м B м = 2 π 5 м 5 шиш α м грамм м = 4 π 5 м 5 и α м = м π б 2 а { displaystyle { begin {align} & w (x, y) = { frac {q_ {0} a ^ {4}} {D}} sum _ {m = 1,3,5, ...} ^ { infty} left (A_ {m} ch { frac {m pi y} {a}} + B_ {m} { frac {m pi y} {a}} sinh { frac {m pi y} {a}} + G_ {m} right) sin { frac {m pi x} {a}} & { begin {align} { text {where} } quad & A_ {m} = - { frac {2 left ( alpha _ {m} tanh alpha _ {m} +2 right)} { pi ^ {5} m ^ {5} cosh alpha _ {m}}} & B_ {m} = { frac {2} { pi ^ {5} m ^ {5} cosh alpha _ {m}}} & G_ {m} = { frac {4} { pi ^ {5} m ^ {5}}} { text {and}} quad & alpha _ {m} = { frac {m pi b } {2a}} конец {выровнено}} конец {выровнено}}} Изгибающие моменты на единицу длины в пластине определяются выражением
M Икс = − q 0 π 2 а 2 ∑ м = 1 , 3 , 5 , . . . ∞ м 2 ( ( ( ν − 1 ) А м + 2 ν B м ) шиш м π у а + ( ν − 1 ) B м м π у а грех м π у а − грамм м ) грех м π Икс а { displaystyle M_ {x} = - q_ {0} pi ^ {2} a ^ {2} sum _ {m = 1,3,5, ...} ^ { infty} m ^ {2} left ( left ( left ( nu -1 right) A_ {m} +2 nu B_ {m} right) cosh { frac {m pi y} {a}} + left ( nu -1 right) B_ {m} { frac {m pi y} {a}} sinh { frac {m pi y} {a}} - G_ {m} right) sin { frac {m pi x} {a}}} M у = − q 0 π 2 а 2 ∑ м = 1 , 3 , 5 , . . . ∞ м 2 ( ( ( 1 − ν ) А м + 2 B м ) шиш м π у а + ( 1 − ν ) B м м π у а грех м π у а − ν грамм м ) грех м π Икс а { displaystyle M_ {y} = - q_ {0} pi ^ {2} a ^ {2} sum _ {m = 1,3,5, ...} ^ { infty} m ^ {2} left ( left ( left (1- nu right) A_ {m} + 2B_ {m} right) cosh { frac {m pi y} {a}} + left (1- nu right) B_ {m} { frac {m pi y} {a}} sinh { frac {m pi y} {a}} - nu G_ {m} right) sin { гидроразрыв {m pi x} {a}}} Равномерная и симметричная моментная нагрузка Для частного случая, когда нагрузка симметрична и момент однороден, мы имеем при у = ± б / 2 { displaystyle y = pm b / 2}
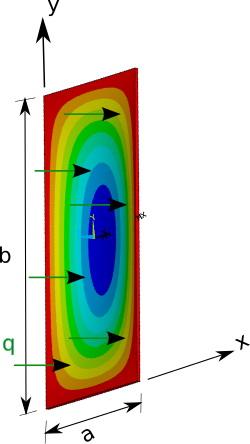
M у у = ж 1 ( Икс ) = 4 M 0 π ∑ м = 1 ∞ 1 2 м − 1 грех ( 2 м − 1 ) π Икс а . { displaystyle M_ {yy} = f_ {1} (x) = { frac {4M_ {0}} { pi}} sum _ {m = 1} ^ { infty} { frac {1} { 2m-1}} , sin { frac {(2m-1) pi x} {a}} ,.} Смещение (
ш { displaystyle w} )
Напряжение изгиба (
σ у у { displaystyle sigma _ {yy}} )
Поперечное напряжение сдвига (
σ у z { displaystyle sigma _ {yz}} )
Смещения и напряжения для прямоугольной пластины при равномерном изгибающем моменте по краям
у = − б / 2 { displaystyle y = -b / 2} и
у = б / 2 { displaystyle y = b / 2} . Напряжение изгиба
σ у у { displaystyle sigma _ {yy}} находится по нижней поверхности пластины. Поперечное напряжение сдвига
σ у z { displaystyle sigma _ {yz}} находится по средней поверхности пластины.
Результирующее смещение равно
ш ( Икс , у ) = 2 M 0 а 2 π 3 D ∑ м = 1 ∞ 1 ( 2 м − 1 ) 3 шиш α м грех ( 2 м − 1 ) π Икс а × [ α м танх α м шиш ( 2 м − 1 ) π у а − ( 2 м − 1 ) π у а грех ( 2 м − 1 ) π у а ] { displaystyle { begin {align} & w (x, y) = { frac {2M_ {0} a ^ {2}} { pi ^ {3} D}} sum _ {m = 1} ^ { infty} { frac {1} {(2m-1) ^ {3} ch alpha _ {m}}} sin { frac {(2m-1) pi x} {a}} times & ~~ left [ alpha _ {m} , tanh alpha _ {m} cosh { frac {(2m-1) pi y} {a}} - { frac {(2m -1) pi y} {a}} sinh { frac {(2m-1) pi y} {a}} right] end {align}}} куда
α м = π ( 2 м − 1 ) б 2 а . { displaystyle alpha _ {m} = { frac { pi (2m-1) b} {2a}} ,.} Изгибающие моменты и поперечные силы, соответствующие смещению ш { displaystyle w}
M Икс Икс = − D ( ∂ 2 ш ∂ Икс 2 + ν ∂ 2 ш ∂ у 2 ) = 2 M 0 ( 1 − ν ) π ∑ м = 1 ∞ 1 ( 2 м − 1 ) шиш α м × грех ( 2 м − 1 ) π Икс а × [ − ( 2 м − 1 ) π у а грех ( 2 м − 1 ) π у а + { 2 ν 1 − ν + α м танх α м } шиш ( 2 м − 1 ) π у а ] M Икс у = ( 1 − ν ) D ∂ 2 ш ∂ Икс ∂ у = − 2 M 0 ( 1 − ν ) π ∑ м = 1 ∞ 1 ( 2 м − 1 ) шиш α м × потому что ( 2 м − 1 ) π Икс а × [ ( 2 м − 1 ) π у а шиш ( 2 м − 1 ) π у а + ( 1 − α м танх α м ) грех ( 2 м − 1 ) π у а ] Q z Икс = ∂ M Икс Икс ∂ Икс − ∂ M Икс у ∂ у = 4 M 0 а ∑ м = 1 ∞ 1 шиш α м × потому что ( 2 м − 1 ) π Икс а шиш ( 2 м − 1 ) π у а . { displaystyle { begin {align} M_ {xx} & = - D left ({ frac { partial ^ {2} w} { partial x ^ {2}}} + nu , { frac { partial ^ {2} w} { partial y ^ {2}}} right) & = { frac {2M_ {0} (1- nu)} { pi}} sum _ { m = 1} ^ { infty} { frac {1} {(2m-1) cosh alpha _ {m}}} , times & ~ sin { frac {(2m-1) pi x} {a}} , times & ~ left [- { frac {(2m-1) pi y} {a}} sinh { frac {(2m-1) pi y} {a}} + right. & qquad qquad qquad qquad left. left {{ frac {2 nu} {1- nu}} + alpha _ {m} tanh alpha _ {m} right } cosh { frac {(2m-1) pi y} {a}} right] M_ {xy} & = (1- nu) D { frac { partial ^ {2} w} { partial x partial y}} & = - { frac {2M_ {0} (1- nu)} { pi}} sum _ {m = 1} ^ { infty} { frac {1} {(2m-1) cosh alpha _ {m}}} , times & ~ cos { frac {(2m-1) pi x} {a}} , times & ~ left [{ frac {(2m-1) pi y} {a}} ch { frac {(2m-1) pi y} {a}} + right. & qquad qquad qquad qquad left. (1- alpha _ {m} tanh alpha _ {m}) sinh { frac {(2m-1 ) pi y} {a}} right] Q_ {zx} & = { frac { partial M_ {xx}} { partial x}} - { frac { partial M_ {xy}} { partial y}} & = { frac {4M_ {0}} {a}} sum _ {m = 1} ^ { infty} { frac {1} { cosh alpha _ {m}}} , times & ~ cos { frac {(2m-1) pi x} {a} } cosh { frac {(2m-1) pi y} {a}} ,. end {align}}} Напряжения
σ Икс Икс = 12 z час 3 M Икс Икс и σ z Икс = 1 κ час Q z Икс ( 1 − 4 z 2 час 2 ) . { displaystyle sigma _ {xx} = { frac {12z} {h ^ {3}}} , M_ {xx} quad { text {and}} quad sigma _ {zx} = { frac {1} { kappa h}} , Q_ {zx} left (1 - { frac {4z ^ {2}} {h ^ {2}}} right) ,.} Гибка цилиндрической пластины Цилиндрический изгиб происходит, когда прямоугольная пластина имеет размеры а × б × час { Displaystyle а раз б раз ч} а ≪ б { displaystyle a ll b} час { displaystyle h}
Пластина с простой опорой и аксиально закрепленными концами Для пластин с простой опорой при цилиндрической гибке с краями, которые могут вращаться, но имеют фиксированные Икс 1 { displaystyle x_ {1}}
Гибка толстых пластин Mindlin Для толстых пластин необходимо учитывать влияние сдвигов по толщине на ориентацию нормали к средней поверхности после деформации. Теория Миндлина предлагает один подход к нахождению деформации и напряжений в таких пластинах. Решения теории Миндлина могут быть получены из эквивалентных решений Кирхгофа-Лява с использованием канонических соотношений.[5]
Основные уравнения Каноническое основное уравнение для изотропных толстых пластин может быть выражено как[5]
∇ 2 ( M − B 1 + ν q ) = − q κ грамм час ( ∇ 2 ш + M D ) = − ( 1 − B c 2 1 + ν ) q ∇ 2 ( ∂ φ 1 ∂ Икс 2 − ∂ φ 2 ∂ Икс 1 ) = c 2 ( ∂ φ 1 ∂ Икс 2 − ∂ φ 2 ∂ Икс 1 ) { displaystyle { begin {align} & nabla ^ {2} left ({ mathcal {M}} - { frac { mathcal {B}} {1+ nu}} , q right) = -q & kappa Gh left ( nabla ^ {2} w + { frac { mathcal {M}} {D}} right) = - left (1 - { cfrac {{ mathcal {B}} c ^ {2}} {1+ nu}} right) q & nabla ^ {2} left ({ frac { partial varphi _ {1}} { partial x_ {2}}} - { frac { partial varphi _ {2}} { partial x_ {1}}} right) = c ^ {2} left ({ frac { partial varphi _ { 1}} { partial x_ {2}}} - { frac { partial varphi _ {2}} { partial x_ {1}}} right) end {align}}} куда q { displaystyle q} грамм { displaystyle G} D = E час 3 / [ 12 ( 1 − ν 2 ) ] { Displaystyle D = Э ^ {3} / [12 (1- nu ^ {2})]} час { displaystyle h} c 2 = 2 κ грамм час / [ D ( 1 − ν ) ] { Displaystyle с ^ {2} = 2 каппа Gh / [D (1- nu)]} κ { displaystyle kappa} E { displaystyle E} ν { displaystyle nu}
M = D [ А ( ∂ φ 1 ∂ Икс 1 + ∂ φ 2 ∂ Икс 2 ) − ( 1 − А ) ∇ 2 ш ] + 2 q 1 − ν 2 B . { displaystyle { mathcal {M}} = D left [{ mathcal {A}} left ({ frac { partial varphi _ {1}} { partial x_ {1}}} + { frac { partial varphi _ {2}} { partial x_ {2}}} right) - (1 - { mathcal {A}}) nabla ^ {2} w right] + { frac { 2q} {1- nu ^ {2}}} { mathcal {B}} ,.} Согласно теории Миндлина, ш { displaystyle w} φ 1 { displaystyle varphi _ {1}} φ 2 { displaystyle varphi _ {2}} Икс 2 { displaystyle x_ {2}} Икс 1 { displaystyle x_ {1}} А = 1 { Displaystyle { mathcal {A}} = 1} B = 0 { displaystyle { mathcal {B}} = 0} κ { displaystyle kappa} 5 / 6 { displaystyle 5/6}
Решения основных уравнений можно найти, если знать соответствующие решения Кирхгофа-Лява с помощью соотношений
ш = ш K + M K κ грамм час ( 1 − B c 2 2 ) − Φ + Ψ φ 1 = − ∂ ш K ∂ Икс 1 − 1 κ грамм час ( 1 − 1 А − B c 2 2 ) Q 1 K + ∂ ∂ Икс 1 ( D κ грамм час А ∇ 2 Φ + Φ − Ψ ) + 1 c 2 ∂ Ω ∂ Икс 2 φ 2 = − ∂ ш K ∂ Икс 2 − 1 κ грамм час ( 1 − 1 А − B c 2 2 ) Q 2 K + ∂ ∂ Икс 2 ( D κ грамм час А ∇ 2 Φ + Φ − Ψ ) + 1 c 2 ∂ Ω ∂ Икс 1 { displaystyle { begin {align} w & = w ^ {K} + { frac {{ mathcal {M}} ^ {K}} { kappa Gh}} left (1 - { frac {{ mathcal {B}} c ^ {2}} {2}} right) - Phi + Psi varphi _ {1} & = - { frac { partial w ^ {K}} { partial x_ {1}}} - { frac {1} { kappa Gh}} left (1 - { frac {1} { mathcal {A}}} - { frac {{ mathcal {B}}) c ^ {2}} {2}} right) Q_ {1} ^ {K} + { frac { partial} { partial x_ {1}}} left ({ frac {D} { kappa Gh { mathcal {A}}}} nabla ^ {2} Phi + Phi - Psi right) + { frac {1} {c ^ {2}}} { frac { partial Omega } { partial x_ {2}}} varphi _ {2} & = - { frac { partial w ^ {K}} { partial x_ {2}}} - { frac {1} { kappa Gh}} left (1 - { frac {1} { mathcal {A}}} - { frac {{ mathcal {B}} c ^ {2}} {2}} right) Q_ {2} ^ {K} + { frac { partial} { partial x_ {2}}} left ({ frac {D} { kappa Gh { mathcal {A}}}} nabla ^ { 2} Phi + Phi - Psi right) + { frac {1} {c ^ {2}}} { frac { partial Omega} { partial x_ {1}}} end {выровнено }}} куда ш K { displaystyle w ^ {K}} Φ { displaystyle Phi} ∇ 2 ∇ 2 Φ = 0 { Displaystyle nabla ^ {2} nabla ^ {2} Phi = 0} Ψ { displaystyle Psi} ∇ 2 Ψ = 0 { Displaystyle nabla ^ {2} Psi = 0}
M = M K + B 1 + ν q + D ∇ 2 Φ ; M K := − D ∇ 2 ш K Q 1 K = − D ∂ ∂ Икс 1 ( ∇ 2 ш K ) , Q 2 K = − D ∂ ∂ Икс 2 ( ∇ 2 ш K ) Ω = ∂ φ 1 ∂ Икс 2 − ∂ φ 2 ∂ Икс 1 , ∇ 2 Ω = c 2 Ω . { displaystyle { begin {align} { mathcal {M}} & = { mathcal {M}} ^ {K} + { frac { mathcal {B}} {1+ nu}} , q + D nabla ^ {2} Phi ~; ~~ { mathcal {M}} ^ {K}: = - D nabla ^ {2} w ^ {K} Q_ {1} ^ {K} & = - D { frac { partial} { partial x_ {1}}} left ( nabla ^ {2} w ^ {K} right) ~, ~~ Q_ {2} ^ {K} = -D { frac { partial} { partial x_ {2}}} left ( nabla ^ {2} w ^ {K} right) Omega & = { frac { partial varphi _ {1}} { partial x_ {2}}} - { frac { partial varphi _ {2}} { partial x_ {1}}} ~, ~~ nabla ^ {2} Omega = c ^ {2} Omega ,. End {выровнено}}} Прямоугольные пластины с простой опорой Для пластин с простой опорой Момент Маркуса сумма равна нулю, т.е.
M = 1 1 + ν ( M 11 + M 22 ) = D ( ∂ φ 1 ∂ Икс 1 + ∂ φ 2 ∂ Икс 2 ) = 0 . { displaystyle { mathcal {M}} = { frac {1} {1+ nu}} (M_ {11} + M_ {22}) = D left ({ frac { partial varphi _ { 1}} { partial x_ {1}}} + { frac { partial varphi _ {2}} { partial x_ {2}}} right) = 0 ,.} В этом случае функции Φ { displaystyle Phi} Ψ { displaystyle Psi} Ω { displaystyle Omega}
ш = ш K + M K κ грамм час . { displaystyle w = w ^ {K} + { frac {{ mathcal {M}} ^ {K}} { kappa Gh}} ,.} Гибка консольных пластин Рейсснера-Штейна Теория Рейсснера-Штейна для консольных пластин[6] q Икс ( у ) { displaystyle q_ {x} (y)} Икс = а { Displaystyle х = а}
б D d 4 ш Икс d Икс 4 = 0 б 3 D 12 d 4 θ Икс d Икс 4 − 2 б D ( 1 − ν ) d 2 θ Икс d Икс 2 = 0 { displaystyle { begin {align} & bD { frac { mathrm {d} ^ {4} w_ {x}} { mathrm {d} x ^ {4}}} = 0 & { frac { b ^ {3} D} {12}} , { frac { mathrm {d} ^ {4} theta _ {x}} { mathrm {d} x ^ {4}}} - 2bD (1 - nu) { cfrac {d ^ {2} theta _ {x}} {dx ^ {2}}} = 0 end {align}}} и граничные условия при Икс = а { Displaystyle х = а}
б D d 3 ш Икс d Икс 3 + q Икс 1 = 0 , б 3 D 12 d 3 θ Икс d Икс 3 − 2 б D ( 1 − ν ) d θ Икс d Икс + q Икс 2 = 0 б D d 2 ш Икс d Икс 2 = 0 , б 3 D 12 d 2 θ Икс d Икс 2 = 0 . { displaystyle { begin {align} & bD { cfrac {d ^ {3} w_ {x}} {dx ^ {3}}} + q_ {x1} = 0 quad, quad { frac {b ^ {3} D} {12}} { cfrac {d ^ {3} theta _ {x}} {dx ^ {3}}} - 2bD (1- nu) { cfrac {d theta _ { x}} {dx}} + q_ {x2} = 0 & bD { cfrac {d ^ {2} w_ {x}} {dx ^ {2}}} = 0 quad, quad { frac { b ^ {3} D} {12}} { cfrac {d ^ {2} theta _ {x}} {dx ^ {2}}} = 0 ,. end {выровнено}}} Решение этой системы двух ОДУ дает
ш Икс ( Икс ) = q Икс 1 6 б D ( 3 а Икс 2 − Икс 3 ) θ Икс ( Икс ) = q Икс 2 2 б D ( 1 − ν ) [ Икс − 1 ν б ( грех ( ν б а ) шиш [ ν б ( Икс − а ) ] + танх [ ν б ( Икс − а ) ] ) ] { Displaystyle { begin {align} w_ {x} (x) & = { frac {q_ {x1}} {6bD}} , (3ax ^ {2} -x ^ {3}) theta _ {x} (x) & = { frac {q_ {x2}} {2bD (1- nu)}} left [x - { frac {1} { nu _ {b}}} , left ({ frac { sinh ( nu _ {b} a)} { ch [ nu _ {b} (xa)]}} + tanh [ nu _ {b} (xa)] right) right] end {выровнено}}} куда ν б = 24 ( 1 − ν ) / б { displaystyle nu _ {b} = { sqrt {24 (1- nu)}} / b} ш = ш Икс + у θ Икс { displaystyle w = w_ {x} + y theta _ {x}}
M Икс Икс = − D ( ∂ 2 ш ∂ Икс 2 + ν ∂ 2 ш ∂ у 2 ) = q Икс 1 ( Икс − а б ) − [ 3 у q Икс 2 б 3 ν б шиш 3 [ ν б ( Икс − а ) ] ] × [ 6 грех ( ν б а ) − грех [ ν б ( 2 Икс − а ) ] + грех [ ν б ( 2 Икс − 3 а ) ] + 8 грех [ ν б ( Икс − а ) ] ] M Икс у = ( 1 − ν ) D ∂ 2 ш ∂ Икс ∂ у = q Икс 2 2 б [ 1 − 2 + шиш [ ν б ( Икс − 2 а ) ] − шиш [ ν б Икс ] 2 шиш 2 [ ν б ( Икс − а ) ] ] Q z Икс = ∂ M Икс Икс ∂ Икс − ∂ M Икс у ∂ у = q Икс 1 б − ( 3 у q Икс 2 2 б 3 шиш 4 [ ν б ( Икс − а ) ] ) × [ 32 + шиш [ ν б ( 3 Икс − 2 а ) ] − шиш [ ν б ( 3 Икс − 4 а ) ] − 16 шиш [ 2 ν б ( Икс − а ) ] + 23 шиш [ ν б ( Икс − 2 а ) ] − 23 шиш ( ν б Икс ) ] . { displaystyle { begin {align} M_ {xx} & = - D left ({ frac { partial ^ {2} w} { partial x ^ {2}}} + nu , { frac { partial ^ {2} w} { partial y ^ {2}}} right) & = q_ {x1} left ({ frac {xa} {b}} right) - left [ { frac {3yq_ {x2}} {b ^ {3} nu _ {b} cosh ^ {3} [ nu _ {b} (xa)]}} right] times & quad left [6 sh ( nu _ {b} a) - sinh [ nu _ {b} (2x-a)] + sinh [ nu _ {b} (2x-3a)] + 8 sinh [ nu _ {b} (xa)] right] M_ {xy} & = (1- nu) D { frac { partial ^ {2} w} { partial x partial y} } & = { frac {q_ {x2}} {2b}} left [1 - { frac {2+ cosh [ nu _ {b} (x-2a)] - cosh [ nu _ {b} x]} {2 cosh ^ {2} [ nu _ {b} (xa)]}} right] Q_ {zx} & = { frac { partial M_ {xx}} { partial x}} - { frac { partial M_ {xy}} { partial y}} & = { frac {q_ {x1}} {b}} - left ({ frac {3yq_ {x2}} {2b ^ {3} cosh ^ {4} [ nu _ {b} (xa)]}} right) times left [32+ ch [ nu _ {b} (3x -2a)] - ch [ nu _ {b} (3x-4a)] right. & qquad left.-16 cosh [2 nu _ {b} (xa)] + 23 cosh [ nu _ {b} (x-2a)] - 23 ch ( nu _ {b} x) right] ,. end {выравнивается}}} Напряжения
σ Икс Икс = 12 z час 3 M Икс Икс и σ z Икс = 1 κ час Q z Икс ( 1 − 4 z 2 час 2 ) . { displaystyle sigma _ {xx} = { frac {12z} {h ^ {3}}} , M_ {xx} quad { text {and}} quad sigma _ {zx} = { frac {1} { kappa h}} , Q_ {zx} left (1 - { frac {4z ^ {2}} {h ^ {2}}} right) ,.} Если приложенная нагрузка на краю постоянна, мы восстанавливаем решения для балки с сосредоточенной концевой нагрузкой. Если приложенная нагрузка является линейной функцией у { displaystyle y}
q Икс 1 = ∫ − б / 2 б / 2 q 0 ( 1 2 − у б ) d у = б q 0 2 ; q Икс 2 = ∫ − б / 2 б / 2 у q 0 ( 1 2 − у б ) d у = − б 2 q 0 12 . { displaystyle q_ {x1} = int _ {- b / 2} ^ {b / 2} q_ {0} left ({ frac {1} {2}} - { frac {y} {b}) } right) , { text {d}} y = { frac {bq_ {0}} {2}} ~; ~~ q_ {x2} = int _ {- b / 2} ^ {b / 2} yq_ {0} left ({ frac {1} {2}} - { frac {y} {b}} right) , { text {d}} y = - { frac {b ^ {2} q_ {0}} {12}} ,.} Смотрите также Рекомендации ^ Редди, Дж. Н., 2007, Теория и анализ упругих пластин и оболочек , CRC Press, Тейлор и Фрэнсис. ^ Тимошенко С. и Войновски-Кригер С. (1959), Теория пластин и оболочек , Макгроу-Хилл, Нью-Йорк. ^ Кук, Р. Д. и др., 2002 г., Концепции и приложения анализа конечных элементов , Джон Уайли и сыновья ^ Леви М., 1899 г., Comptes rendues , т. 129, стр. 535-539. ^ а б Лим, Г. Т. и Редди, Дж. Н., 2003 г., О каноническом изгибе отношения для тарелок, Международный журнал твердых тел и структур, вып. 40, С. 3039-3067. ^ Э. Рейсснер и М. Штейн. Кручение и поперечный изгиб консольных пластин. Техническая нота 2369, Национальный консультативный комитет по аэронавтике, Вашингтон, 1951 г. 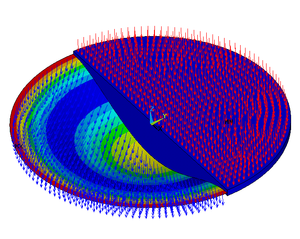



































![{ Displaystyle { cfrac { partial ^ {4} F} { partial x ^ {4}}} + 2 { cfrac { partial ^ {4} F} { partial x ^ {2} partial y ^ {2}}} + { cfrac { partial ^ {4} F} { partial y ^ {4}}} = E left [ left ({ cfrac { partial ^ {2} w} { partial x partial y}} right) ^ {2} - { cfrac { partial ^ {2} w} { partial x ^ {2}}} { cfrac { partial ^ {2} w} { partial y ^ {2}}} right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4a797f21006ff4d841374f445a8e54ab2b7fb279)








![frac {1} {r} cfrac {d} {dr} left [r cfrac {d} {dr} left { frac {1} {r} cfrac {d} {dr} left (r cfrac {dw} {dr} right) right } right] = - frac {q} {D} ,.](https://wikimedia.org/api/rest_v1/media/math/render/svg/9f8083e6e16a9118c0afe8bd3c7e1fe841e17334)















![sigma_ {rr} = frac {E} {1- nu ^ 2} left [ varepsilon_ {rr} + nu varepsilon _ { theta theta} right] ~; ~~
sigma _ { theta theta} = frac {E} {1- nu ^ 2} left [ varepsilon _ { theta theta} + nu varepsilon_ {rr} right] ~; ~~
sigma_ {r theta} = 0 ,.](https://wikimedia.org/api/rest_v1/media/math/render/svg/3113afbe187db314e19db5772f1fb7ec65d5f2bf)

![D = 2Eh ^ 3 / [3 (1- nu ^ 2)]](https://wikimedia.org/api/rest_v1/media/math/render/svg/0a71aa263a9aeffc5de8a3eeb37a569a193d2443)
![begin {align}
sigma_ {rr} & = - frac {3qz} {32h ^ 3} left [(1+ nu) a ^ 2- (3+ nu) r ^ 2 right]
sigma _ { theta theta} & = - frac {3qz} {32h ^ 3} left [(1+ nu) a ^ 2- (1 + 3 nu) r ^ 2 right]
sigma_ {r theta} & = 0 ,.
end {align}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8e9eae0c15eb3c3606cfcbfadf7e523df1069eae)
![M_ {rr} = - frac {q} {16} left [(1+ nu) a ^ 2- (3+ nu) r ^ 2 right] ~; ~~
M _ { theta theta} = - frac {q} {16} left [(1+ nu) a ^ 2- (1 + 3 nu) r ^ 2 right] ~; ~~
M_ {r theta} = 0 ,.](https://wikimedia.org/api/rest_v1/media/math/render/svg/6fa27857c8e8ae81af9dc56fa29a74b33bc3dad8)




































 Смещение ()
Смещение () Стресс ()
Стресс () Стресс ()Смещения и напряжения по для прямоугольной пластины с мм, мм, мм, ГПа и под нагрузкой кПа. Красная линия представляет нижнюю часть тарелки, зеленая линия - середину, а синяя линия - верх тарелки.
Стресс ()Смещения и напряжения по для прямоугольной пластины с мм, мм, мм, ГПа и под нагрузкой кПа. Красная линия представляет нижнюю часть тарелки, зеленая линия - середину, а синяя линия - верх тарелки.





























![sum_ {m = 1} ^ infty left [ left ( frac {m pi} {a} right) ^ 4 Y_m sin frac {m pi x} {a}
- 2 left ( frac {m pi} {a} right) ^ 2 cfrac {d ^ 2 Y_m} {d y ^ 2} sin frac {m pi x} {a}
+ frac {d ^ 4Y_m} {dy ^ 4} sin frac {m pi x} {a} right] = 0](https://wikimedia.org/api/rest_v1/media/math/render/svg/c4b7bc6c19d495de8e6086dc8866cf7571b323f9)



![w (x, y) = sum_ {m = 1} ^ infty left [
left (A_m + B_m frac {m pi y} {a} right) cosh frac {m pi y} {a} +
left (C_m + D_m frac {m pi y} {a} right) sinh frac {m pi y} {a}
right] sin frac {m pi x} {a} ,.](https://wikimedia.org/api/rest_v1/media/math/render/svg/f35b38c6ddc1b29b74377203666d669c5791b2cc)













 Смещение ()
Смещение () Напряжение изгиба ()
Напряжение изгиба () Поперечное напряжение сдвига ()Смещения и напряжения для прямоугольной пластины при равномерном изгибающем моменте по краям и . Напряжение изгиба находится по нижней поверхности пластины. Поперечное напряжение сдвига находится по средней поверхности пластины.
Поперечное напряжение сдвига ()Смещения и напряжения для прямоугольной пластины при равномерном изгибающем моменте по краям и . Напряжение изгиба находится по нижней поверхности пластины. Поперечное напряжение сдвига находится по средней поверхности пластины.






![{ displaystyle { begin {align} & w (x, y) = { frac {2M_ {0} a ^ {2}} { pi ^ {3} D}} sum _ {m = 1} ^ { infty} { frac {1} {(2m-1) ^ {3} ch alpha _ {m}}} sin { frac {(2m-1) pi x} {a}} times & ~~ left [ alpha _ {m} , tanh alpha _ {m} cosh { frac {(2m-1) pi y} {a}} - { frac {(2m -1) pi y} {a}} sinh { frac {(2m-1) pi y} {a}} right] end {align}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/05bb4b518f750d8e1aafd47fb079065c5c4a5786)

![{ displaystyle { begin {align} M_ {xx} & = - D left ({ frac { partial ^ {2} w} { partial x ^ {2}}} + nu , { frac { partial ^ {2} w} { partial y ^ {2}}} right) & = { frac {2M_ {0} (1- nu)} { pi}} sum _ { m = 1} ^ { infty} { frac {1} {(2m-1) cosh alpha _ {m}}} , times & ~ sin { frac {(2m-1) pi x} {a}} , times & ~ left [- { frac {(2m-1) pi y} {a}} sinh { frac {(2m-1) pi y} {a}} + right. & qquad qquad qquad qquad left. left {{ frac {2 nu} {1- nu}} + alpha _ {m} tanh alpha _ {m} right } cosh { frac {(2m-1) pi y} {a}} right] M_ {xy} & = (1- nu) D { frac { partial ^ {2} w} { partial x partial y}} & = - { frac {2M_ {0} (1- nu)} { pi}} sum _ {m = 1} ^ { infty} { frac {1} {(2m-1) cosh alpha _ {m}}} , times & ~ cos { frac {(2m-1) pi x} {a}} , times & ~ left [{ frac {(2m-1) pi y} {a}} ch { frac {(2m-1) pi y} {a}} + right. & qquad qquad qquad qquad left. (1- alpha _ {m} tanh alpha _ {m}) sinh { frac {(2m-1 ) pi y} {a}} right] Q_ {zx} & = { frac { partial M_ {xx}} { partial x}} - { frac { partial M_ {xy}} { partial y}} & = { frac {4M_ {0}} {a}} sum _ {m = 1} ^ { infty} { frac {1} { cosh alpha _ {m}}} , times & ~ cos { frac {(2m-1) pi x} {a} } cosh { frac {(2m-1) pi y} {a}} ,. end {align}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b46371a14545a06c6bb677179132a02137a8fbb4)







![D = Eh ^ 3 / [12 (1- nu ^ 2)]](https://wikimedia.org/api/rest_v1/media/math/render/svg/1f3bf995e9bb0214179b93d14f38e7e01cf3a671)
![c ^ 2 = 2 каппа G h / [D (1- nu)]](https://wikimedia.org/api/rest_v1/media/math/render/svg/0bc4c3ed836ac15ba7c94c0e0fc3cd9fb1d8825a)

![mathcal {M} = D left [ mathcal {A} left ( frac { partial varphi_1} { partial x_1} + frac { partial varphi_2} { partial x_2} right)
- (1- mathcal {A}) nabla ^ 2 w right] + frac {2q} {1- nu ^ 2} mathcal {B} ,.](https://wikimedia.org/api/rest_v1/media/math/render/svg/c93657927f897412a7df1207325d3a731bfa9fed)



















![begin {align}
w_x (x) & = frac {q_ {x1}} {6bD} , (3ax ^ 2 -x ^ 3)
theta_x (x) & = frac {q_ {x2}} {2bD (1- nu)} left [x - frac {1} { nu_b} ,
left ( frac { sinh ( nu_b a)} { ch [ nu_b (x-a)]} + tanh [ nu_b (x-a)] right) right]
end {align}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6a9eebb0810de812da44e1e62453b7af0aa8dddf)


![begin {align}
M_ {xx} & = -D left ( frac { partial ^ 2 w} { partial x ^ 2} + nu , frac { partial ^ 2 w} { partial y ^ 2} right )
& = q_ {x1} left ( frac {xa} {b} right) - left [ frac {3yq_ {x2}} {b ^ 3 nu_b cosh ^ 3 [ nu_b (xa)]} верно]
раз
& quad left [6 sinh ( nu_b a) - sinh [ nu_b (2x-a)] +
sinh [ nu_b (2x-3a)] + 8 sinh [ nu_b (x-a)] right]
M_ {xy} & = (1- nu) D frac { partial ^ 2 w} { partial x partial y}
& = frac {q_ {x2}} {2b} left [1 -
frac {2+ cosh [ nu_b (x-2a)] - cosh [ nu_b x]} {2 cosh ^ 2 [ nu_b (x-a)]} right]
Q_ {zx} & = frac { partial M_ {xx}} { partial x} - frac { partial M_ {xy}} { partial y}
& = frac {q_ {x1}} {b} - left ( frac {3yq_ {x2}} {2b ^ 3 cosh ^ 4 [ nu_b (x-a)]} right) times
left [32 + ch [ nu_b (3x-2a)] - ch [ nu_b (3x-4a)] right.
& qquad left. - 16 ch [2 nu_b (x-a)] +
23 cosh [ nu_b (x-2a)] - 23 ch ( nu_b x) right] ,.
end {align}](https://wikimedia.org/api/rest_v1/media/math/render/svg/23db4b670f6da6f2f18a0e2419ca828fbc73d657)
