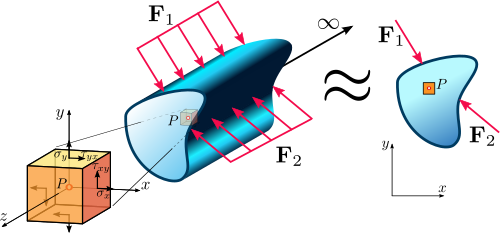
В механика сплошной среды , то теория бесконечно малых деформаций математический подход к описанию деформация твердого тела, в котором смещения материала частицы считаются намного меньшими (действительно, бесконечно мало меньше), чем любой соответствующий размер тела; так что его геометрия и основные свойства материала (например, плотность и жесткость ) в каждой точке пространства можно считать неизменным из-за деформации.
При таком предположении уравнения механики сплошной среды значительно упрощаются. Этот подход также можно назвать теория малых деформаций , теория малых перемещений , или же теория малого смещения-градиента . Это контрастирует с теория конечных деформаций где сделано противоположное предположение.
Теория бесконечно малых деформаций обычно применяется в гражданском строительстве и машиностроении для анализ напряжения конструкций, построенных из относительно жестких эластичный материалы как конкретный и стали , поскольку общей целью при проектировании таких конструкций является минимизация их деформации при типичных грузы . Однако это приближение требует осторожности в случае тонких гибких тел, таких как стержни, пластины и оболочки, которые подвержены значительному вращению, что делает результаты ненадежными.[1]
Тензор бесконечно малых деформаций За бесконечно малые деформации из континуальное тело , в которой градиент смещения (Тензор 2-го порядка) мал по сравнению с единицей, т.е. ‖ ∇ ты ‖ ≪ 1 { Displaystyle | набла mathbf {и} | ll 1} геометрическая линеаризация любого из (бесконечного множества возможных) тензоров деформации, используемых в теории конечных деформаций, например тензор лагранжевой деформации E { displaystyle mathbf {E}} е { displaystyle mathbf {e}}
E = 1 2 ( ∇ Икс ты + ( ∇ Икс ты ) Т + ( ∇ Икс ты ) Т ∇ Икс ты ) ≈ 1 2 ( ∇ Икс ты + ( ∇ Икс ты ) Т ) { displaystyle mathbf {E} = { frac {1} {2}} left ( nabla _ { mathbf {X}} mathbf {u} + ( nabla _ { mathbf {X}} mathbf {u}) ^ {T} + ( nabla _ { mathbf {X}} mathbf {u}) ^ {T} nabla _ { mathbf {X}} mathbf {u} right) приблизительно { frac {1} {2}} left ( nabla _ { mathbf {X}} mathbf {u} + ( nabla _ { mathbf {X}} mathbf {u}) ^ {T }верно)} или
E K L = 1 2 ( ∂ U K ∂ Икс L + ∂ U L ∂ Икс K + ∂ U M ∂ Икс K ∂ U M ∂ Икс L ) ≈ 1 2 ( ∂ U K ∂ Икс L + ∂ U L ∂ Икс K ) { Displaystyle E_ {KL} = { frac {1} {2}} left ({ frac { partial U_ {K}} { partial X_ {L}}} + { frac { partial U_ { L}} { partial X_ {K}}} + { frac { partial U_ {M}} { partial X_ {K}}} { frac { partial U_ {M}} { partial X_ {L }}} right) приблизительно { frac {1} {2}} left ({ frac { partial U_ {K}} { partial X_ {L}}} + { frac { partial U_ { L}} { partial X_ {K}}} right)} и
е = 1 2 ( ∇ Икс ты + ( ∇ Икс ты ) Т − ∇ Икс ты ( ∇ Икс ты ) Т ) ≈ 1 2 ( ∇ Икс ты + ( ∇ Икс ты ) Т ) { displaystyle mathbf {e} = { frac {1} {2}} left ( nabla _ { mathbf {x}} mathbf {u} + ( nabla _ { mathbf {x}} mathbf {u}) ^ {T} - nabla _ { mathbf {x}} mathbf {u} ( nabla _ { mathbf {x}} mathbf {u}) ^ {T} right) приблизительно { frac {1} {2}} left ( nabla _ { mathbf {x}} mathbf {u} + ( nabla _ { mathbf {x}} mathbf {u}) ^ {T }верно)} или
е р s = 1 2 ( ∂ ты р ∂ Икс s + ∂ ты s ∂ Икс р − ∂ ты k ∂ Икс р ∂ ты k ∂ Икс s ) ≈ 1 2 ( ∂ ты р ∂ Икс s + ∂ ты s ∂ Икс р ) { displaystyle e_ {rs} = { frac {1} {2}} left ({ frac { partial u_ {r}} { partial x_ {s}}} + { frac { partial u_ { s}} { partial x_ {r}}} - { frac { partial u_ {k}} { partial x_ {r}}} { frac { partial u_ {k}} { partial x_ {s }}} right) приблизительно { frac {1} {2}} left ({ frac { partial u_ {r}} { partial x_ {s}}} + { frac { partial u_ { s}} { partial x_ {r}}} right)} Эта линеаризация подразумевает, что лагранжевое описание и эйлерово описание примерно одинаковы, поскольку существует небольшая разница в материальных и пространственных координатах данной материальной точки в континууме. Следовательно, компоненты градиента смещения материала и компоненты градиента пространственного смещения приблизительно равны. Таким образом, мы имеем
E ≈ е ≈ ε = 1 2 ( ( ∇ ты ) Т + ∇ ты ) { displaystyle mathbf {E} приблизительно mathbf {e} приблизительно { boldsymbol { varepsilon}} = { frac {1} {2}} left (( nabla mathbf {u}) ^ { T} + nabla mathbf {u} right) qquad} или E K L ≈ е р s ≈ ε я j = 1 2 ( ты я , j + ты j , я ) { displaystyle qquad E_ {KL} приблизительно e_ {rs} приблизительно varepsilon _ {ij} = { frac {1} {2}} left (u_ {i, j} + u_ {j, i} верно)}
где ε я j { displaystyle varepsilon _ {ij}} тензор бесконечно малых деформаций ε { displaystyle { boldsymbol { varepsilon}}} Тензор деформации Коши , тензор линейной деформации , или же тензор малых деформаций .
ε я j = 1 2 ( ты я , j + ты j , я ) = [ ε 11 ε 12 ε 13 ε 21 ε 22 ε 23 ε 31 ε 32 ε 33 ] = [ ∂ ты 1 ∂ Икс 1 1 2 ( ∂ ты 1 ∂ Икс 2 + ∂ ты 2 ∂ Икс 1 ) 1 2 ( ∂ ты 1 ∂ Икс 3 + ∂ ты 3 ∂ Икс 1 ) 1 2 ( ∂ ты 2 ∂ Икс 1 + ∂ ты 1 ∂ Икс 2 ) ∂ ты 2 ∂ Икс 2 1 2 ( ∂ ты 2 ∂ Икс 3 + ∂ ты 3 ∂ Икс 2 ) 1 2 ( ∂ ты 3 ∂ Икс 1 + ∂ ты 1 ∂ Икс 3 ) 1 2 ( ∂ ты 3 ∂ Икс 2 + ∂ ты 2 ∂ Икс 3 ) ∂ ты 3 ∂ Икс 3 ] { displaystyle { begin {align} varepsilon _ {ij} & = { frac {1} {2}} left (u_ {i, j} + u_ {j, i} right) & = left [{ begin {matrix} varepsilon _ {11} & varepsilon _ {12} & varepsilon _ {13} varepsilon _ {21} & varepsilon _ {22} & varepsilon _ {23 } varepsilon _ {31} & varepsilon _ {32} & varepsilon _ {33} end {matrix}} right] & = left [{ begin {matrix} { frac { partial u_ {1}} { partial x_ {1}}} & { frac {1} {2}} left ({ frac { partial u_ {1}} { partial x_ {2}} } + { frac { partial u_ {2}} { partial x_ {1}}} right) & { frac {1} {2}} left ({ frac { partial u_ {1}} { partial x_ {3}}} + { frac { partial u_ {3}} { partial x_ {1}}} right) { frac {1} {2}} left ({ frac { partial u_ {2}} { partial x_ {1}}} + { frac { partial u_ {1}} { partial x_ {2}}} right) & { frac { partial u_ {2}} { partial x_ {2}}} & { frac {1} {2}} left ({ frac { partial u_ {2}} { partial x_ {3}}} + { frac { partial u_ {3}} { partial x_ {2}}} right) { frac {1} {2}} left ({ frac { partial u_ {3}} { partial x_ {1}}} + { frac { partial u_ {1}} { partial x_ {3}}} right) & { frac {1} {2}} left ({ frac { partial u_ {3}} { partial x_ {2}}} + { frac { partial u_ {2}} { partial x_ {3}}} right) & { frac { partial u_ {3}} { partial x_ {3 }}} конец {матрица}} right] end {выровнен}}} или используя другие обозначения:
[ ε Икс Икс ε Икс у ε Икс z ε у Икс ε у у ε у z ε z Икс ε z у ε z z ] = [ ∂ ты Икс ∂ Икс 1 2 ( ∂ ты Икс ∂ у + ∂ ты у ∂ Икс ) 1 2 ( ∂ ты Икс ∂ z + ∂ ты z ∂ Икс ) 1 2 ( ∂ ты у ∂ Икс + ∂ ты Икс ∂ у ) ∂ ты у ∂ у 1 2 ( ∂ ты у ∂ z + ∂ ты z ∂ у ) 1 2 ( ∂ ты z ∂ Икс + ∂ ты Икс ∂ z ) 1 2 ( ∂ ты z ∂ у + ∂ ты у ∂ z ) ∂ ты z ∂ z ] { displaystyle left [{ begin {matrix} varepsilon _ {xx} & varepsilon _ {xy} & varepsilon _ {xz} varepsilon _ {yx} & varepsilon _ {yy} & varepsilon _ {yz} varepsilon _ {zx} & varepsilon _ {zy} & varepsilon _ {zz} end {matrix}} right] = left [{ begin {matrix} { frac { partial u_ {x}} { partial x}} & { frac {1} {2}} left ({ frac { partial u_ {x}} { partial y}} + { frac { partial u_ {y}} { partial x}} right) & { frac {1} {2}} left ({ frac { partial u_ {x}} { partial z}} + { frac { partial u_ {z}} { partial x}} right) { frac {1} {2}} left ({ frac { partial u_ {y}} { partial x}} + { frac { partial u_ {x}} { partial y}} right) & { frac { partial u_ {y}} { partial y}} & { frac {1} {2}} left ({ frac { partial u_ {y}} { partial z}} + { frac { partial u_ {z}} { partial y}} right) { frac {1} { 2}} left ({ frac { partial u_ {z}} { partial x}} + { frac { partial u_ {x}} { partial z}} right) & { frac {1 } {2}} left ({ frac { partial u_ {z}} { partial y}} + { frac { partial u_ {y}} { partial z}} right) & { frac { partial u_ {z}} { partial z}} end {matrix}} right]} Кроме того, поскольку градиент деформации можно выразить как F = ∇ ты + я { displaystyle { boldsymbol {F}} = { boldsymbol { nabla}} mathbf {u} + { boldsymbol {I}}} я { displaystyle { boldsymbol {I}}}
ε = 1 2 ( F Т + F ) − я { displaystyle { boldsymbol { varepsilon}} = { frac {1} {2}} left ({ boldsymbol {F}} ^ {T} + { boldsymbol {F}} right) - { полужирный символ {I}}} Также из общее выражение для лагранжевых и эйлеровых тензоров конечных деформаций имеем
E ( м ) = 1 2 м ( U 2 м − я ) = 1 2 м [ ( F Т F ) м − я ] ≈ 1 2 м [ { ∇ ты + ( ∇ ты ) Т + я } м − я ] ≈ ε е ( м ) = 1 2 м ( V 2 м − я ) = 1 2 м [ ( F F Т ) м − я ] ≈ ε { displaystyle { begin {align} mathbf {E} _ {(m)} & = { frac {1} {2m}} ( mathbf {U} ^ {2m} - { boldsymbol {I}} ) = { frac {1} {2m}} [({ boldsymbol {F}} ^ {T} { boldsymbol {F}}) ^ {m} - { boldsymbol {I}}] приблизительно { гидроразрыв {1} {2m}} [ {{ boldsymbol { nabla}} mathbf {u} + ({ boldsymbol { nabla}} mathbf {u}) ^ {T} + { boldsymbol {I }} } ^ {m} - { boldsymbol {I}}] приблизительно { boldsymbol { varepsilon}} mathbf {e} _ {(m)} & = { frac {1} {2m }} ( mathbf {V} ^ {2m} - { boldsymbol {I}}) = { frac {1} {2m}} [({ boldsymbol {F}} { boldsymbol {F}} ^ { T}) ^ {m} - { boldsymbol {I}}] приблизительно { boldsymbol { varepsilon}} end {align}}} Геометрическое происхождение Рис. 1. Двумерная геометрическая деформация бесконечно малого материального элемента.
Рассмотрим двумерную деформацию бесконечно малого прямоугольного материального элемента с размерами d Икс { displaystyle dx} d у { displaystyle dy}
а б ¯ = ( d Икс + ∂ ты Икс ∂ Икс d Икс ) 2 + ( ∂ ты у ∂ Икс d Икс ) 2 = d Икс 1 + 2 ∂ ты Икс ∂ Икс + ( ∂ ты Икс ∂ Икс ) 2 + ( ∂ ты у ∂ Икс ) 2 { displaystyle { begin {align} { overline {ab}} & = { sqrt { left (dx + { frac { partial u_ {x}} { partial x}} dx right) ^ {2 } + left ({ frac { partial u_ {y}} { partial x}} dx right) ^ {2}}} & = dx { sqrt {1 + 2 { frac { partial u_ {x}} { partial x}} + left ({ frac { partial u_ {x}} { partial x}} right) ^ {2} + left ({ frac { partial u_ {y}} { partial x}} right) ^ {2}}} конец {выровнено}}} Для очень малых градиентов смещения, т. Е. ‖ ∇ ты ‖ ≪ 1 { Displaystyle | набла mathbf {и} | ll 1}
а б ¯ ≈ d Икс + ∂ ты Икс ∂ Икс d Икс { displaystyle { overline {ab}} приблизительно dx + { frac { partial u_ {x}} { partial x}} dx} В нормальное напряжение в Икс { displaystyle x}
ε Икс = а б ¯ − А B ¯ А B ¯ { displaystyle varepsilon _ {x} = { frac {{ overline {ab}} - { overline {AB}}} { overline {AB}}}} и зная, что А B ¯ = d Икс { displaystyle { overline {AB}} = dx}
ε Икс = ∂ ты Икс ∂ Икс { displaystyle varepsilon _ {x} = { frac { partial u_ {x}} { partial x}}} Точно так же нормальная деформация в у { displaystyle y} z { displaystyle z}
ε у = ∂ ты у ∂ у , ε z = ∂ ты z ∂ z { displaystyle varepsilon _ {y} = { frac { partial u_ {y}} { partial y}} quad, qquad varepsilon _ {z} = { frac { partial u_ {z}} { partial z}}} В инженерная деформация сдвига , или изменение угла между двумя исходно ортогональными линиями материала, в данном случае линия А C ¯ { displaystyle { overline {AC}}} А B ¯ { displaystyle { overline {AB}}}
γ Икс у = α + β { Displaystyle гамма _ {ху} = альфа + бета} Из геометрии рисунка 1 мы имеем
загар α = ∂ ты у ∂ Икс d Икс d Икс + ∂ ты Икс ∂ Икс d Икс = ∂ ты у ∂ Икс 1 + ∂ ты Икс ∂ Икс , загар β = ∂ ты Икс ∂ у d у d у + ∂ ты у ∂ у d у = ∂ ты Икс ∂ у 1 + ∂ ты у ∂ у { displaystyle tan alpha = { frac {{ dfrac { partial u_ {y}} { partial x}} dx} {dx + { dfrac { partial u_ {x}} { partial x}} dx}} = { frac { dfrac { partial u_ {y}} { partial x}} {1 + { dfrac { partial u_ {x}} { partial x}}}} quad, qquad tan beta = { frac {{ dfrac { partial u_ {x}} { partial y}} dy} {dy + { dfrac { partial u_ {y}} { partial y}} dy} } = { frac { dfrac { partial u_ {x}} { partial y}} {1 + { dfrac { partial u_ {y}} { partial y}}}}} Для небольших поворотов, т.е. α { displaystyle alpha} β { displaystyle beta} ≪ 1 { displaystyle ll 1}
загар α ≈ α , загар β ≈ β { Displaystyle загар альфа приблизительно альфа четырехугольник, qquad загар бета приблизительно бета} и, опять же, для малых градиентов смещения имеем
α = ∂ ты у ∂ Икс , β = ∂ ты Икс ∂ у { displaystyle alpha = { frac { partial u_ {y}} { partial x}} quad, qquad beta = { frac { partial u_ {x}} { partial y}}} таким образом
γ Икс у = α + β = ∂ ты у ∂ Икс + ∂ ты Икс ∂ у { displaystyle gamma _ {xy} = alpha + beta = { frac { partial u_ {y}} { partial x}} + { frac { partial u_ {x}} { partial y} }} Меняя местами Икс { displaystyle x} у { displaystyle y} ты Икс { displaystyle u_ {x}} ты у { displaystyle u_ {y}} γ Икс у = γ у Икс { displaystyle gamma _ {xy} = gamma _ {yx}}
Аналогично для у { displaystyle y} z { displaystyle z} Икс { displaystyle x} z { displaystyle z}
γ у z = γ z у = ∂ ты у ∂ z + ∂ ты z ∂ у , γ z Икс = γ Икс z = ∂ ты z ∂ Икс + ∂ ты Икс ∂ z { displaystyle gamma _ {yz} = gamma _ {zy} = { frac { partial u_ {y}} { partial z}} + { frac { partial u_ {z}} { partial y }} quad, qquad gamma _ {zx} = gamma _ {xz} = { frac { partial u_ {z}} { partial x}} + { frac { partial u_ {x}} { partial z}}} Можно видеть, что компоненты тензорной деформации сдвига тензора бесконечно малых деформаций могут быть затем выражены с использованием определения инженерной деформации: γ { displaystyle gamma}
[ ε Икс Икс ε Икс у ε Икс z ε у Икс ε у у ε у z ε z Икс ε z у ε z z ] = [ ε Икс Икс γ Икс у / 2 γ Икс z / 2 γ у Икс / 2 ε у у γ у z / 2 γ z Икс / 2 γ z у / 2 ε z z ] { displaystyle left [{ begin {matrix} varepsilon _ {xx} & varepsilon _ {xy} & varepsilon _ {xz} varepsilon _ {yx} & varepsilon _ {yy} & varepsilon _ {yz} varepsilon _ {zx} & varepsilon _ {zy} & varepsilon _ {zz} end {matrix}} right] = left [{ begin {matrix} varepsilon _ {xx} & gamma _ {xy} / 2 & gamma _ {xz} / 2 gamma _ {yx} / 2 & varepsilon _ {yy} & gamma _ {yz} / 2 gamma _ {zx} / 2 & gamma _ {zy} / 2 & varepsilon _ {zz} end {matrix}} right]}
Физическая интерпретация Из теория конечных деформаций у нас есть
d Икс 2 − d Икс 2 = d Икс ⋅ 2 E ⋅ d Икс или ( d Икс ) 2 − ( d Икс ) 2 = 2 E K L d Икс K d Икс L { displaystyle d mathbf {x} ^ {2} -d mathbf {X} ^ {2} = d mathbf {X} cdot 2 mathbf {E} cdot d mathbf {X} quad { text {или}} quad (dx) ^ {2} - (dX) ^ {2} = 2E_ {KL} , dX_ {K} , dX_ {L}} Для бесконечно малых деформаций имеем
d Икс 2 − d Икс 2 = d Икс ⋅ 2 ε ⋅ d Икс или ( d Икс ) 2 − ( d Икс ) 2 = 2 ε K L d Икс K d Икс L { displaystyle d mathbf {x} ^ {2} -d mathbf {X} ^ {2} = d mathbf {X} cdot 2 mathbf { boldsymbol { varepsilon}} cdot d mathbf { X} quad { text {или}} quad (dx) ^ {2} - (dX) ^ {2} = 2 varepsilon _ {KL} , dX_ {K} , dX_ {L}} Деление на ( d Икс ) 2 { displaystyle (dX) ^ {2}}
d Икс − d Икс d Икс d Икс + d Икс d Икс = 2 ε я j d Икс я d Икс d Икс j d Икс { displaystyle { frac {dx-dX} {dX}} { frac {dx + dX} {dX}} = 2 varepsilon _ {ij} { frac {dX_ {i}} {dX}} { гидроразрыв {dX_ {j}} {dX}}} При малых деформациях считаем, что d Икс ≈ d Икс { Displaystyle dx приблизительно dX} d Икс + d Икс d Икс ≈ 2 { displaystyle { frac {dx + dX} {dX}} приблизительно 2}
Тогда у нас есть
d Икс − d Икс d Икс = ε я j N я N j = N ⋅ ε ⋅ N { displaystyle { frac {dx-dX} {dX}} = varepsilon _ {ij} N_ {i} N_ {j} = mathbf {N} cdot { boldsymbol { varepsilon}} cdot mathbf {N}} где N я = d Икс я d Икс { displaystyle N_ {i} = { frac {dX_ {i}} {dX}}} d Икс { displaystyle d mathbf {X}} нормальное напряжение е ( N ) { Displaystyle е _ {( mathbf {N})}} N { displaystyle mathbf {N}} N { displaystyle mathbf {N}} Икс 1 { displaystyle X_ {1}} N = я 1 { Displaystyle mathbf {N} = mathbf {I} _ {1}}
е ( я 1 ) = я 1 ⋅ ε ⋅ я 1 = ε 11 { displaystyle e _ {( mathbf {I} _ {1})} = mathbf {I} _ {1} cdot { boldsymbol { varepsilon}} cdot mathbf {I} _ {1} = varepsilon _ {11}} Аналогично для N = я 2 { Displaystyle mathbf {N} = mathbf {I} _ {2}} N = я 3 { Displaystyle mathbf {N} = mathbf {I} _ {3}} ε 22 { displaystyle varepsilon _ {22}} ε 33 { displaystyle varepsilon _ {33}}
Правила трансформации штамма Если мы выберем ортонормированная система координат ( е 1 , е 2 , е 3 { displaystyle mathbf {e} _ {1}, mathbf {e} _ {2}, mathbf {e} _ {3}}
ε = ∑ я = 1 3 ∑ j = 1 3 ε я j е я ⊗ е j { displaystyle { boldsymbol { varepsilon}} = sum _ {i = 1} ^ {3} sum _ {j = 1} ^ {3} varepsilon _ {ij} mathbf {e} _ {i } otimes mathbf {e} _ {j}} В матричной форме
ε _ _ = [ ε 11 ε 12 ε 13 ε 12 ε 22 ε 23 ε 13 ε 23 ε 33 ] { displaystyle { underline { underline { boldsymbol { varepsilon}}}} = { begin {bmatrix} varepsilon _ {11} & varepsilon _ {12} & varepsilon _ {13} varepsilon _ {12} & varepsilon _ {22} & varepsilon _ {23} varepsilon _ {13} & varepsilon _ {23} & varepsilon _ {33} end {bmatrix}}} Мы можем легко выбрать другую ортонормированную систему координат ( е ^ 1 , е ^ 2 , е ^ 3 { displaystyle { hat { mathbf {e}}} _ {1}, { hat { mathbf {e}}} _ {2}, { hat { mathbf {e}}} _ {3} }
ε = ∑ я = 1 3 ∑ j = 1 3 ε ^ я j е ^ я ⊗ е ^ j ⟹ ε ^ _ _ = [ ε ^ 11 ε ^ 12 ε ^ 13 ε ^ 12 ε ^ 22 ε ^ 23 ε ^ 13 ε ^ 23 ε ^ 33 ] { displaystyle { boldsymbol { varepsilon}} = sum _ {i = 1} ^ {3} sum _ {j = 1} ^ {3} { hat { varepsilon}} _ {ij} { hat { mathbf {e}}} _ {i} otimes { hat { mathbf {e}}} _ {j} quad подразумевает quad { underline { underline { hat { boldsymbol { varepsilon}}}}} = { begin {bmatrix} { hat { varepsilon}} _ {11} & { hat { varepsilon}} _ {12} & { hat { varepsilon}} _ {13 } { hat { varepsilon}} _ {12} & { hat { varepsilon}} _ {22} & { hat { varepsilon}} _ {23} { hat { varepsilon} } _ {13} & { hat { varepsilon}} _ {23} & { hat { varepsilon}} _ {33} end {bmatrix}}} Компоненты деформации в двух системах координат связаны соотношением
ε ^ я j = ℓ я п ℓ j q ε п q { Displaystyle { hat { varepsilon}} _ {ij} = ell _ {ip} ~ ell _ {jq} ~ varepsilon _ {pq}} где Соглашение о суммировании Эйнштейна для повторных индексов использовался и ℓ я j = е ^ я ⋅ е j { displaystyle ell _ {ij} = { hat { mathbf {e}}} _ {i} cdot mathbf {e} _ {j}}
ε ^ _ _ = L _ _ ε _ _ L _ _ Т { displaystyle { underline { underline { hat { boldsymbol { varepsilon}}}}} = { underline { underline { mathbf {L}}}} ~ { underline { underline { boldsymbol { varepsilon}}}} ~ { underline { underline { mathbf {L}}}} ^ {T}} или
[ ε ^ 11 ε ^ 12 ε ^ 13 ε ^ 21 ε ^ 22 ε ^ 23 ε ^ 31 ε ^ 32 ε ^ 33 ] = [ ℓ 11 ℓ 12 ℓ 13 ℓ 21 ℓ 22 ℓ 23 ℓ 31 ℓ 32 ℓ 33 ] [ ε 11 ε 12 ε 13 ε 21 ε 22 ε 23 ε 31 ε 32 ε 33 ] [ ℓ 11 ℓ 12 ℓ 13 ℓ 21 ℓ 22 ℓ 23 ℓ 31 ℓ 32 ℓ 33 ] Т { displaystyle { begin {bmatrix} { hat { varepsilon}} _ {11} & { hat { varepsilon}} _ {12} & { hat { varepsilon}} _ {13} { hat { varepsilon}} _ {21} & { hat { varepsilon}} _ {22} & { hat { varepsilon}} _ {23} { hat { varepsilon}} _ {31 } & { hat { varepsilon}} _ {32} & { hat { varepsilon}} _ {33} end {bmatrix}} = { begin {bmatrix} ell _ {11} & ell _ {12} & ell _ {13} ell _ {21} & ell _ {22} & ell _ {23} ell _ {31} & ell _ {32} & ell _ {33} end {bmatrix}} { begin {bmatrix} varepsilon _ {11} & varepsilon _ {12} & varepsilon _ {13} varepsilon _ {21} & varepsilon _ {22 } & varepsilon _ {23} varepsilon _ {31} & varepsilon _ {32} & varepsilon _ {33} end {bmatrix}} { begin {bmatrix} ell _ {11} & ell _ {12} & ell _ {13} ell _ {21} & ell _ {22} & ell _ {23} ell _ {31} & ell _ {32} & ell _ {33} end {bmatrix}} ^ {T}} Инварианты деформации Некоторые операции с тензором деформации дают тот же результат независимо от того, какая ортонормированная система координат используется для представления компонентов деформации. Результаты этих операций называются инварианты деформации . Наиболее часто используемые инварианты деформации:
я 1 = т р ( ε ) я 2 = 1 2 { [ т р ( ε ) ] 2 − т р ( ε 2 ) } я 3 = Det ( ε ) { displaystyle { begin {align} I_ {1} & = mathrm {tr} ({ boldsymbol { varepsilon}}) I_ {2} & = { tfrac {1} {2}} { [ mathrm {tr} ({ boldsymbol { varepsilon}})] ^ {2} - mathrm {tr} ({ boldsymbol { varepsilon}} ^ {2}) } I_ {3} & = det ({ boldsymbol { varepsilon}}) end {align}}} Что касается компонентов
я 1 = ε 11 + ε 22 + ε 33 я 2 = ε 12 2 + ε 23 2 + ε 31 2 − ε 11 ε 22 − ε 22 ε 33 − ε 33 ε 11 я 3 = ε 11 ( ε 22 ε 33 − ε 23 2 ) − ε 12 ( ε 11 ε 33 − ε 23 ε 31 ) + ε 13 ( ε 21 ε 32 − ε 22 ε 31 ) { displaystyle { begin {align} I_ {1} & = varepsilon _ {11} + varepsilon _ {22} + varepsilon _ {33} I_ {2} & = varepsilon _ {12} ^ {2} + varepsilon _ {23} ^ {2} + varepsilon _ {31} ^ {2} - varepsilon _ {11} varepsilon _ {22} - varepsilon _ {22} varepsilon _ {33 } - varepsilon _ {33} varepsilon _ {11} I_ {3} & = varepsilon _ {11} ( varepsilon _ {22} varepsilon _ {33} - varepsilon _ {23} ^ { 2}) - varepsilon _ {12} ( varepsilon _ {11} varepsilon _ {33} - varepsilon _ {23} varepsilon _ {31}) + varepsilon _ {13} ( varepsilon _ {21 } varepsilon _ {32} - varepsilon _ {22} varepsilon _ {31}) end {align}}} Основные штаммы Можно показать, что можно найти систему координат ( п 1 , п 2 , п 3 { displaystyle mathbf {n} _ {1}, mathbf {n} _ {2}, mathbf {n} _ {3}}
ε _ _ = [ ε 1 0 0 0 ε 2 0 0 0 ε 3 ] ⟹ ε = ε 1 п 1 ⊗ п 1 + ε 2 п 2 ⊗ п 2 + ε 3 п 3 ⊗ п 3 { displaystyle { underline { underline { boldsymbol { varepsilon}}}} = { begin {bmatrix} varepsilon _ {1} & 0 & 0 0 & varepsilon _ {2} & 0 0 & 0 & varepsilon _ { 3} end {bmatrix}} quad implies quad { boldsymbol { varepsilon}} = varepsilon _ {1} mathbf {n} _ {1} otimes mathbf {n} _ {1} + varepsilon _ {2} mathbf {n} _ {2} otimes mathbf {n} _ {2} + varepsilon _ {3} mathbf {n} _ {3} otimes mathbf {n} _ {3}} Компоненты тензора деформаций в ( п 1 , п 2 , п 3 { displaystyle mathbf {n} _ {1}, mathbf {n} _ {2}, mathbf {n} _ {3}} основные штаммы и направления п я { Displaystyle mathbf {п} _ {я}}
Если нам заданы компоненты тензора деформаций в произвольной ортонормированной системе координат, мы можем найти главные деформации, используя разложение на собственные значения определяется решением системы уравнений
( ε _ _ − ε я я _ _ ) п я = 0 _ { displaystyle ({ underline { underline { boldsymbol { varepsilon}}}} - varepsilon _ {i} ~ { underline { underline { mathbf {I}}}}) ~ mathbf {n} _ {i} = { underline { mathbf {0}}}} Эта система уравнений эквивалентна нахождению вектора п я { Displaystyle mathbf {п} _ {я}}
Объемная деформация В расширение (относительное изменение объема) - след тензора:
δ = Δ V V 0 = ε 11 + ε 22 + ε 33 { displaystyle delta = { frac { Delta V} {V_ {0}}} = varepsilon _ {11} + varepsilon _ {22} + varepsilon _ {33}} На самом деле, если рассматривать куб с длиной ребра а , это квазикуб после деформации (изменение углов не меняет объем) с размерами а ⋅ ( 1 + ε 11 ) × а ⋅ ( 1 + ε 22 ) × а ⋅ ( 1 + ε 33 ) { displaystyle a cdot (1+ varepsilon _ {11}) times a cdot (1+ varepsilon _ {22}) times a cdot (1+ varepsilon _ {33})} V 0 = а 3 , таким образом
Δ V V 0 = ( 1 + ε 11 + ε 22 + ε 33 + ε 11 ⋅ ε 22 + ε 11 ⋅ ε 33 + ε 22 ⋅ ε 33 + ε 11 ⋅ ε 22 ⋅ ε 33 ) ⋅ а 3 − а 3 а 3 { displaystyle { frac { Delta V} {V_ {0}}} = { frac { left (1+ varepsilon _ {11} + varepsilon _ {22} + varepsilon _ {33} + varepsilon _ {11} cdot varepsilon _ {22} + varepsilon _ {11} cdot varepsilon _ {33} + varepsilon _ {22} cdot varepsilon _ {33} + varepsilon _ {11} cdot varepsilon _ {22} cdot varepsilon _ {33} right) cdot a ^ {3} -a ^ {3}} {a ^ {3}}}} поскольку мы рассматриваем небольшие деформации,
1 ≫ ε я я ≫ ε я я ⋅ ε j j ≫ ε 11 ⋅ ε 22 ⋅ ε 33 { displaystyle 1 gg varepsilon _ {ii} gg varepsilon _ {ii} cdot varepsilon _ {jj} gg varepsilon _ {11} cdot varepsilon _ {22} cdot varepsilon _ { 33}} поэтому формула.
Реальное изменение объема (вверху) и приблизительное (внизу): зеленый рисунок показывает расчетный объем, оранжевый рисунок - неучтенный объем
В случае чистого сдвига мы видим, что объем не изменяется.
Тензор девиатора деформации Тензор бесконечно малых деформаций ε я j { displaystyle varepsilon _ {ij}} Тензор напряжений Коши , можно выразить как сумму двух других тензоров:
а тензор средней деформации или тензор объемной деформации или тензор сферической деформации , ε M δ я j { displaystyle varepsilon _ {M} delta _ {ij}} девиаторный компонент, называемый тензор девиатора деформации , ε я j ′ { displaystyle varepsilon '_ {ij}} ε я j = ε я j ′ + ε M δ я j { displaystyle varepsilon _ {ij} = varepsilon '_ {ij} + varepsilon _ {M} delta _ {ij}} где ε M { displaystyle varepsilon _ {M}}
ε M = ε k k 3 = ε 11 + ε 22 + ε 33 3 = 1 3 я 1 е { displaystyle varepsilon _ {M} = { frac { varepsilon _ {kk}} {3}} = { frac { varepsilon _ {11} + varepsilon _ {22} + varepsilon _ {33} } {3}} = { tfrac {1} {3}} I_ {1} ^ {e}} Тензор девиаторных деформаций может быть получен путем вычитания тензора средней деформации из тензора бесконечно малых деформаций:
ε я j ′ = ε я j − ε k k 3 δ я j [ ε 11 ′ ε 12 ′ ε 13 ′ ε 21 ′ ε 22 ′ ε 23 ′ ε 31 ′ ε 32 ′ ε 33 ′ ] = [ ε 11 ε 12 ε 13 ε 21 ε 22 ε 23 ε 31 ε 32 ε 33 ] − [ ε M 0 0 0 ε M 0 0 0 ε M ] = [ ε 11 − ε M ε 12 ε 13 ε 21 ε 22 − ε M ε 23 ε 31 ε 32 ε 33 − ε M ] { displaystyle { begin {align} varepsilon '_ {ij} & = varepsilon _ {ij} - { frac { varepsilon _ {kk}} {3}} delta _ {ij} left [{ begin {matrix} varepsilon '_ {11} & varepsilon' _ {12} & varepsilon '_ {13} varepsilon' _ {21} & varepsilon '_ {22} & varepsilon '_ {23} varepsilon' _ {31} & varepsilon '_ {32} & varepsilon' _ {33} end {matrix}} right] & = left [{ begin {matrix} varepsilon _ {11} & varepsilon _ {12} & varepsilon _ {13} varepsilon _ {21} & varepsilon _ {22} & varepsilon _ {23} varepsilon _ {31} & varepsilon _ {32} & varepsilon _ {33} end {matrix}} right] - left [{ begin {matrix} varepsilon _ {M} & 0 & 0 0 & varepsilon _ {M} & 0 0 & 0 & varepsilon _ {M} end {matrix}} right] & = left [{ begin {matrix} varepsilon _ {11} - varepsilon _ {M } & varepsilon _ {12} & varepsilon _ {13} varepsilon _ {21} & varepsilon _ {22} - varepsilon _ {M} & varepsilon _ {23} varepsilon _ { 31} & varepsilon _ {32} & varepsilon _ {33} - varepsilon _ {M} end {matrix}} right] конец {выровнено}}} Октаэдрические деформации Позволять ( п 1 , п 2 , п 3 { displaystyle mathbf {n} _ {1}, mathbf {n} _ {2}, mathbf {n} _ {3}} октаэдрическая плоскость - это тот, нормаль которого составляет равные углы с тремя главными направлениями. Инженерия деформация сдвига на октаэдрической плоскости называется октаэдрическая деформация сдвига и дается
γ о c т = 2 3 ( ε 1 − ε 2 ) 2 + ( ε 2 − ε 3 ) 2 + ( ε 3 − ε 1 ) 2 { displaystyle gamma _ { mathrm {oct}} = { tfrac {2} {3}} { sqrt {( varepsilon _ {1} - varepsilon _ {2}) ^ {2} + ( varepsilon _ {2} - varepsilon _ {3}) ^ {2} + ( varepsilon _ {3} - varepsilon _ {1}) ^ {2}}}} где ε 1 , ε 2 , ε 3 { displaystyle varepsilon _ {1}, varepsilon _ {2}, varepsilon _ {3}} [нужна цитата
В нормальное напряжение на октаэдрической плоскости определяется выражением
ε о c т = 1 3 ( ε 1 + ε 2 + ε 3 ) { displaystyle varepsilon _ { mathrm {oct}} = { tfrac {1} {3}} ( varepsilon _ {1} + varepsilon _ {2} + varepsilon _ {3})} [нужна цитата Эквивалентная деформация Скалярная величина, называемая эквивалентная деформация , или фон Мизес эквивалентная деформация, часто используется для описания состояния деформации в твердых телах. В литературе можно найти несколько определений эквивалентной деформации. Определение, которое обычно используется в литературе по пластичность является
ε е q = 2 3 ε d е v : ε d е v = 2 3 ε я j d е v ε я j d е v ; ε d е v = ε − 1 3 т р ( ε ) я { displaystyle varepsilon _ { mathrm {eq}} = { sqrt {{ tfrac {2} {3}} { boldsymbol { varepsilon}} ^ { mathrm {dev}}: { boldsymbol { varepsilon}} ^ { mathrm {dev}}} = { sqrt {{ tfrac {2} {3}} varepsilon _ {ij} ^ { mathrm {dev}} varepsilon _ {ij} ^ { mathrm {dev}}} ~; ~~ { boldsymbol { varepsilon}} ^ { mathrm {dev}} = { boldsymbol { varepsilon}} - { tfrac {1} {3}} mathrm {tr} ({ boldsymbol { varepsilon}}) ~ { boldsymbol {I}}} Эта величина является работой, сопряженной с эквивалентным напряжением, определяемым как
σ е q = 3 2 σ d е v : σ d е v { displaystyle sigma _ { mathrm {eq}} = { sqrt {{ tfrac {3} {2}} { boldsymbol { sigma}} ^ { mathrm {dev}}: { boldsymbol { сигма}} ^ { mathrm {dev}}}}} Уравнения совместимости Для предписанных компонентов деформации ε я j { displaystyle varepsilon _ {ij}} ты я , j + ты j , я = 2 ε я j { displaystyle u_ {i, j} + u_ {j, i} = 2 varepsilon _ {ij}} ты я { displaystyle u_ {i}} уравнения совместимости , накладываются на компоненты деформации. С добавлением трех уравнений совместимости количество независимых уравнений сокращается до трех, что соответствует количеству неизвестных компонентов смещения. Эти ограничения на тензор деформации были обнаружены Сен-Венан , и называются "Уравнения совместимости Сен-Венана ".
Функции совместимости служат для обеспечения однозначной непрерывной функции смещения ты я { displaystyle u_ {i}}
В индексной записи уравнения совместимости выражаются как
ε я j , k м + ε k м , я j − ε я k , j м − ε j м , я k = 0 { displaystyle varepsilon _ {ij, km} + varepsilon _ {km, ij} - varepsilon _ {ik, jm} - varepsilon _ {jm, ik} = 0} Инженерная нотация ∂ 2 ϵ Икс ∂ у 2 + ∂ 2 ϵ у ∂ Икс 2 = 2 ∂ 2 ϵ Икс у ∂ Икс ∂ у { displaystyle { frac { partial ^ {2} epsilon _ {x}} { partial y ^ {2}}} + { frac { partial ^ {2} epsilon _ {y}} { частичный x ^ {2}}} = 2 { frac { partial ^ {2} epsilon _ {xy}} { partial x partial y}}} ∂ 2 ϵ у ∂ z 2 + ∂ 2 ϵ z ∂ у 2 = 2 ∂ 2 ϵ у z ∂ у ∂ z { displaystyle { frac { partial ^ {2} epsilon _ {y}} { partial z ^ {2}}} + { frac { partial ^ {2} epsilon _ {z}} { частичный y ^ {2}}} = 2 { frac { partial ^ {2} epsilon _ {yz}} { partial y partial z}}}
∂ 2 ϵ Икс ∂ z 2 + ∂ 2 ϵ z ∂ Икс 2 = 2 ∂ 2 ϵ z Икс ∂ z ∂ Икс { displaystyle { frac { partial ^ {2} epsilon _ {x}} { partial z ^ {2}}} + { frac { partial ^ {2} epsilon _ {z}} { частичный x ^ {2}}} = 2 { frac { partial ^ {2} epsilon _ {zx}} { partial z partial x}}}
∂ 2 ϵ Икс ∂ у ∂ z = ∂ ∂ Икс ( − ∂ ϵ у z ∂ Икс + ∂ ϵ z Икс ∂ у + ∂ ϵ Икс у ∂ z ) { displaystyle { frac { partial ^ {2} epsilon _ {x}} { partial y partial z}} = { frac { partial} { partial x}} left (- { frac { partial epsilon _ {yz}} { partial x}} + { frac { partial epsilon _ {zx}} { partial y}} + { frac { partial epsilon _ {xy}} { partial z}} right)}
∂ 2 ϵ у ∂ z ∂ Икс = ∂ ∂ у ( ∂ ϵ у z ∂ Икс − ∂ ϵ z Икс ∂ у + ∂ ϵ Икс у ∂ z ) { displaystyle { frac { partial ^ {2} epsilon _ {y}} { partial z partial x}} = { frac { partial} { partial y}} left ({ frac { partial epsilon _ {yz}} { partial x}} - { frac { partial epsilon _ {zx}} { partial y}} + { frac { partial epsilon _ {xy}} { partial z}} right)}
∂ 2 ϵ z ∂ Икс ∂ у = ∂ ∂ z ( ∂ ϵ у z ∂ Икс + ∂ ϵ z Икс ∂ у − ∂ ϵ Икс у ∂ z ) { displaystyle { frac { partial ^ {2} epsilon _ {z}} { partial x partial y}} = { frac { partial} { partial z}} left ({ frac { partial epsilon _ {yz}} { partial x}} + { frac { partial epsilon _ {zx}} { partial y}} - { frac { partial epsilon _ {xy}} { partial z}} right)}
Особые случаи Деформация самолета Плоское деформированное состояние в континууме.
В реальных инженерных компонентах, стресс (и деформация) 3-D тензоры но в призматических конструкциях, таких как длинная металлическая заготовка, длина конструкции намного больше двух других размеров. Деформации, связанные с длиной, т.е. нормальная деформация ε 33 { displaystyle varepsilon _ {33}} ε 13 { displaystyle varepsilon _ {13}} ε 23 { displaystyle varepsilon _ {23}} поперечные деформации . В таком случае плоская деформация является приемлемым приближением. В тензор деформации для плоской деформации записывается как:
ε _ _ = [ ε 11 ε 12 0 ε 21 ε 22 0 0 0 0 ] { displaystyle { underline { underline { boldsymbol { varepsilon}}}} = { begin {bmatrix} varepsilon _ {11} & varepsilon _ {12} & 0 varepsilon _ {21} & varepsilon _ {22} & 0 0 & 0 & 0 end {bmatrix}}} в котором двойное подчеркивание указывает на второй порядок тензор . Это деформированное состояние называется плоская деформация . Соответствующий тензор напряжений:
σ _ _ = [ σ 11 σ 12 0 σ 21 σ 22 0 0 0 σ 33 ] { displaystyle { underline { underline { boldsymbol { sigma}}}} = { begin {bmatrix} sigma _ {11} & sigma _ {12} & 0 sigma _ {21} & сигма _ {22} & 0 0 & 0 & sigma _ {33} end {bmatrix}}} в котором ненулевой σ 33 { displaystyle sigma _ {33}} ϵ 33 = 0 { displaystyle epsilon _ {33} = 0}
Антиплоскостное напряжение Антиплоская деформация - это еще одно особое состояние деформации, которое может возникнуть в теле, например, в области, близкой к винтовая дислокация . В тензор деформации для антиплоскостной деформации определяется выражением
ε _ _ = [ 0 0 ε 13 0 0 ε 23 ε 13 ε 23 0 ] { displaystyle { underline { underline { boldsymbol { varepsilon}}}} = { begin {bmatrix} 0 & 0 & varepsilon _ {13} 0 & 0 & varepsilon _ {23} varepsilon _ {13} & varepsilon _ {23} & 0 end {bmatrix}}} Тензор бесконечно малого вращения Тензор бесконечно малых деформаций определяется как
ε = 1 2 [ ∇ ты + ( ∇ ты ) Т ] { displaystyle { boldsymbol { varepsilon}} = { frac {1} {2}} [{ boldsymbol { nabla}} mathbf {u} + ({ boldsymbol { nabla}} mathbf {u }) ^ {T}]} Следовательно, градиент смещения может быть выражен как
∇ ты = ε + ω { displaystyle { boldsymbol { nabla}} mathbf {u} = { boldsymbol { varepsilon}} + { boldsymbol { omega}}} где
ω := 1 2 [ ∇ ты − ( ∇ ты ) Т ] { displaystyle { boldsymbol { omega}}: = { frac {1} {2}} [{ boldsymbol { nabla}} mathbf {u} - ({ boldsymbol { nabla}} mathbf { u}) ^ {T}]} Количество ω { displaystyle { boldsymbol { omega}}} тензор бесконечно малого вращения . Этот тензор кососимметричный . Для бесконечно малых деформаций скалярные компоненты ω { displaystyle { boldsymbol { omega}}} | ω я j | ≪ 1 { displaystyle | omega _ {ij} | ll 1} обе тензор деформации и тензор вращения бесконечно малы.
Осевой вектор Кососимметричный тензор второго порядка имеет три независимых скалярных компонента. Эти три компонента используются для определения осевой вектор , ш { displaystyle mathbf {w}}
ω я j = − ϵ я j k ш k ; ш я = − 1 2 ϵ я j k ω j k { displaystyle omega _ {ij} = - epsilon _ {ijk} ~ w_ {k} ~; ~~ w_ {i} = - { tfrac {1} {2}} ~ epsilon _ {ijk} ~ omega _ {jk}} где ϵ я j k { displaystyle epsilon _ {ijk}} символ перестановки . В матричной форме
ω _ _ = [ 0 − ш 3 ш 2 ш 3 0 − ш 1 − ш 2 ш 1 0 ] ; ш _ = [ ш 1 ш 2 ш 3 ] { displaystyle { underline { underline { boldsymbol { omega}}}} = { begin {bmatrix} 0 & -w_ {3} & w_ {2} w_ {3} & 0 & -w_ {1} -w_ {2} & w_ {1} & 0 end {bmatrix}} ~; ~~ { underline { mathbf {w}}} = { begin {bmatrix} w_ {1} w_ {2} ш_ {3} end {bmatrix}}} Осевой вектор также называют бесконечно малый вектор вращения . Вектор вращения связан с градиентом смещения соотношением
ш = 1 2 ∇ × ты { displaystyle mathbf {w} = { tfrac {1} {2}} ~ { boldsymbol { nabla}} times mathbf {u}} В индексной записи
ш я = 1 2 ϵ я j k ты k , j { displaystyle w_ {i} = { tfrac {1} {2}} ~ epsilon _ {ijk} ~ u_ {k, j}} Если ‖ ω ‖ ≪ 1 { displaystyle lVert { boldsymbol { omega}} rVert ll 1} ε = 0 { displaystyle { boldsymbol { varepsilon}} = { boldsymbol {0}}} | ш | { displaystyle | mathbf {w} |} ш { displaystyle mathbf {w}}
Связь тензора деформации и вектора вращения Учитывая непрерывное однозначное поле смещения ты { displaystyle mathbf {u}} ε { displaystyle { boldsymbol { varepsilon}}} Тензорная производная (механика сплошной среды) )
∇ × ε = е я j k ε л j , я е k ⊗ е л = 1 2 е я j k [ ты л , j я + ты j , л я ] е k ⊗ е л { displaystyle { boldsymbol { nabla}} times { boldsymbol { varepsilon}} = e_ {ijk} ~ varepsilon _ {lj, i} ~ mathbf {e} _ {k} otimes mathbf { e} _ {l} = { tfrac {1} {2}} ~ e_ {ijk} ~ [u_ {l, ji} + u_ {j, li}] ~ mathbf {e} _ {k} otimes mathbf {e} _ {l}} Поскольку изменение порядка дифференцирования не меняет результата, ты л , j я = ты л , я j { displaystyle u_ {l, ji} = u_ {l, ij}}
е я j k ты л , j я = ( е 12 k + е 21 k ) ты л , 12 + ( е 13 k + е 31 k ) ты л , 13 + ( е 23 k + е 32 k ) ты л , 32 = 0 { displaystyle , e_ {ijk} u_ {l, ji} = (e_ {12k} + e_ {21k}) u_ {l, 12} + (e_ {13k} + e_ {31k}) u_ {l, 13 } + (e_ {23k} + e_ {32k}) u_ {l, 32} = 0} Также
1 2 е я j k ты j , л я = ( 1 2 е я j k ты j , я ) , л = ( 1 2 е k я j ты j , я ) , л = ш k , л { displaystyle { tfrac {1} {2}} ~ e_ {ijk} ~ u_ {j, li} = left ({ tfrac {1} {2}} ~ e_ {ijk} ~ u_ {j, i) } right) _ {, l} = left ({ tfrac {1} {2}} ~ e_ {kij} ~ u_ {j, i} right) _ {, l} = w_ {k, l} } Следовательно
∇ × ε = ш k , л е k ⊗ е л = ∇ ш { displaystyle { boldsymbol { nabla}} times { boldsymbol { varepsilon}} = w_ {k, l} ~ mathbf {e} _ {k} otimes mathbf {e} _ {l} = { boldsymbol { nabla}} mathbf {w}} Связь между тензором вращения и вектором вращения От важной идентичности относительно локон тензора мы знаем, что для непрерывного однозначного поля смещения ты { displaystyle mathbf {u}}
∇ × ( ∇ ты ) = 0 . { displaystyle { boldsymbol { nabla}} times ({ boldsymbol { nabla}} mathbf {u}) = { boldsymbol {0}}.} С ∇ ты = ε + ω { displaystyle { boldsymbol { nabla}} mathbf {u} = { boldsymbol { varepsilon}} + { boldsymbol { omega}}} ∇ × ω = − ∇ × ε = − ∇ ш . { displaystyle { boldsymbol { nabla}} times { boldsymbol { omega}} = - { boldsymbol { nabla}} times { boldsymbol { varepsilon}} = - { boldsymbol { nabla} } mathbf {w}.}
Тензор деформации в цилиндрических координатах В цилиндрические полярные координаты ( р , θ , z { displaystyle r, theta, z}
ты = ты р е р + ты θ е θ + ты z е z { displaystyle mathbf {u} = u_ {r} ~ mathbf {e} _ {r} + u _ { theta} ~ mathbf {e} _ { theta} + u_ {z} ~ mathbf {e } _ {z}} Компоненты тензора деформации в цилиндрической системе координат задаются выражением:[2] ε р р = ∂ ты р ∂ р ε θ θ = 1 р ( ∂ ты θ ∂ θ + ты р ) ε z z = ∂ ты z ∂ z ε р θ = 1 2 ( 1 р ∂ ты р ∂ θ + ∂ ты θ ∂ р − ты θ р ) ε θ z = 1 2 ( ∂ ты θ ∂ z + 1 р ∂ ты z ∂ θ ) ε z р = 1 2 ( ∂ ты р ∂ z + ∂ ты z ∂ р ) { displaystyle { begin {align} varepsilon _ {rr} & = { cfrac { partial u_ {r}} { partial r}} varepsilon _ { theta theta} & = { cfrac {1} {r}} left ({ cfrac { partial u _ { theta}} { partial theta}} + u_ {r} right) varepsilon _ {zz} & = { cfrac { partial u_ {z}} { partial z}} varepsilon _ {r theta} & = { cfrac {1} {2}} left ({ cfrac {1} {r}} { cfrac { partial u_ {r}} { partial theta}} + { cfrac { partial u _ { theta}} { partial r}} - { cfrac {u _ { theta}} {r} } right) varepsilon _ { theta z} & = { cfrac {1} {2}} left ({ cfrac { partial u _ { theta}} { partial z}} + { cfrac {1} {r}} { cfrac { partial u_ {z}} { partial theta}} right) varepsilon _ {zr} & = { cfrac {1} {2}} слева ({ cfrac { partial u_ {r}} { partial z}} + { cfrac { partial u_ {z}} { partial r}} right) end {выравнивается}}}
Тензор деформации в сферических координатах В сферические координаты ( р , θ , ϕ { displaystyle r, theta, phi}
Сферические координаты (
р ,
θ ,
φ ) как обычно используется в
физика : радиальное расстояние
р , полярный угол
θ (
тета ) и азимутальный угол
φ (
фи ). Символ
ρ (
ро ) часто используется вместо
р .
ты = ты р е р + ты θ е θ + ты ϕ е ϕ { displaystyle mathbf {u} = u_ {r} ~ mathbf {e} _ {r} + u _ { theta} ~ mathbf {e} _ { theta} + u _ { phi} ~ mathbf { е} _ { phi}} Компоненты тензора деформации в сферической системе координат задаются выражениями [2]
ε р р = ∂ ты р ∂ р ε θ θ = 1 р ( ∂ ты θ ∂ θ + ты р ) ε ϕ ϕ = 1 р грех θ ( ∂ ты ϕ ∂ ϕ + ты р грех θ + ты θ потому что θ ) ε р θ = 1 2 ( 1 р ∂ ты р ∂ θ + ∂ ты θ ∂ р − ты θ р ) ε θ ϕ = 1 2 р ( 1 грех θ ∂ ты θ ∂ ϕ + ∂ ты ϕ ∂ θ − ты ϕ детская кроватка θ ) ε ϕ р = 1 2 ( 1 р грех θ ∂ ты р ∂ ϕ + ∂ ты ϕ ∂ р − ты ϕ р ) { displaystyle { begin {align} varepsilon _ {rr} & = { cfrac { partial u_ {r}} { partial r}} varepsilon _ { theta theta} & = { cfrac {1} {r}} left ({ cfrac { partial u _ { theta}} { partial theta}} + u_ {r} right) varepsilon _ { phi phi} & = { cfrac {1} {r sin theta}} left ({ cfrac { partial u _ { phi}} { partial phi}} + u_ {r} sin theta + u _ { theta } cos theta right) varepsilon _ {r theta} & = { cfrac {1} {2}} left ({ cfrac {1} {r}} { cfrac { partial u_ {r}} { partial theta}} + { cfrac { partial u _ { theta}} { partial r}} - { cfrac {u _ { theta}} {r}} right) varepsilon _ { theta phi} & = { cfrac {1} {2r}} left ({ cfrac {1} { sin theta}} { cfrac { partial u _ { theta}} { partial phi}} + { cfrac { partial u _ { phi}} { partial theta}} - u _ { phi} cot theta right) varepsilon _ { phi r} & = { cfrac {1} {2}} left ({ cfrac {1} {r sin theta}} { cfrac { partial u_ {r}} { partial phi}} + { cfrac { partial u _ { phi}} { partial r}} - { cfrac {u _ { phi}} {r}} right) end {выравнивается}}} Смотрите также Рекомендации ^ Борези, Артур П. (Артур Питер), 1924- (2003). Продвинутая механика материалов . Шмидт, Ричард Дж. (Ричард Джозеф), 1954- (6-е изд.). Нью-Йорк: Джон Вили и сыновья. п. 62. ISBN 1601199228 OCLC 430194205 . CS1 maint: несколько имен: список авторов (ссылка на сайт) ^ а б Слотер, Уильям С. (2002). Линеаризованная теория упругости . Нью-Йорк: Springer Science + Business Media. Дои :10.1007/978-1-4612-0093-2 . ISBN 9781461266082 внешняя ссылка История Связанные отрасли Формализации Индивидуальные концепции Математики Учебники











![{ begin {align} varepsilon _ {{ij}} & = { frac {1} {2}} left (u _ {{i, j}} + u _ {{j, i}} right) & = left [{ begin {matrix} varepsilon _ {{11}} & varepsilon _ {{12}} & varepsilon _ {{13}} varepsilon _ {{21}} & varepsilon _ {{22}} & varepsilon _ {{23}} varepsilon _ {{31}} & varepsilon _ {{32}} & varepsilon _ {{33}} end {матрица }} right] & = left [{ begin {matrix} { frac { partial u_ {1}} { partial x_ {1}}} & { frac {1} {2}} влево ({ frac { partial u_ {1}} { partial x_ {2}}} + { frac { partial u_ {2}} { partial x_ {1}}} right) & { frac {1} {2}} left ({ frac { partial u_ {1}} { partial x_ {3}}} + { frac { partial u_ {3}} { partial x_ {1}}) } right) { frac {1} {2}} left ({ frac { partial u_ {2}} { partial x_ {1}}} + { frac { partial u_ {1}) } { partial x_ {2}}} right) & { frac { partial u_ {2}} { partial x_ {2}}} & { frac {1} {2}} left ({ frac { partial u_ {2}} { partial x_ {3}}} + { frac { partial u_ {3}} { partial x_ {2}}} right) { frac {1} {2}} left ({ frac { partial u_ {3}} { partial x_ {1}}} + { frac { partial u_ {1}} { partial x_ {3}}} right ) & { frac {1} {2}} l eft ({ frac { partial u_ {3}} { partial x_ {2}}} + { frac { partial u_ {2}} { partial x_ {3}}} right) & { frac { partial u_ {3}} { partial x_ {3}}} end {matrix}} right] end {выравнивается}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bb0dec1ef6797c51a0f0c4181deccd53618a3fe0)
![{ displaystyle left [{ begin {matrix} varepsilon _ {xx} & varepsilon _ {xy} & varepsilon _ {xz} varepsilon _ {yx} & varepsilon _ {yy} & varepsilon _ {yz} varepsilon _ {zx} & varepsilon _ {zy} & varepsilon _ {zz} end {matrix}} right] = left [{ begin {matrix} { frac { partial u_ {x}} { partial x}} & { frac {1} {2}} left ({ frac { partial u_ {x}} { partial y}} + { frac { partial u_ {y}} { partial x}} right) & { frac {1} {2}} left ({ frac { partial u_ {x}} { partial z}} + { frac { partial u_ {z}} { partial x}} right) { frac {1} {2}} left ({ frac { partial u_ {y}} { partial x}} + { frac { partial u_ {x}} { partial y}} right) & { frac { partial u_ {y}} { partial y}} & { frac {1} {2}} left ({ frac { partial u_ {y}} { partial z}} + { frac { partial u_ {z}} { partial y}} right) { frac {1} { 2}} left ({ frac { partial u_ {z}} { partial x}} + { frac { partial u_ {x}} { partial z}} right) & { frac {1 } {2}} left ({ frac { partial u_ {z}} { partial y}} + { frac { partial u_ {y}} { partial z}} right) & { frac { partial u_ {z}} { partial z}} end {matrix}} right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/39dcad2454a2afad8148dbad6cdd8cd60014ca2d)



![{ begin {align} { mathbf E} _ {{(m)}} & = { frac {1} {2m}} ({ mathbf U} ^ {{2m}} - { boldsymbol {I}) }) = { frac {1} {2m}} [({ boldsymbol {F}} ^ {T} { boldsymbol {F}}) ^ {m} - { boldsymbol {I}}] приблизительно { frac {1} {2m}} [ {{ boldsymbol { nabla}} { mathbf {u}} + ({ boldsymbol { nabla}} { mathbf {u}}) ^ {T} + { boldsymbol {I}} } ^ {m} - { boldsymbol {I}}] приблизительно { boldsymbol { varepsilon}} { mathbf e} _ {{(m)}} & = { frac {1} {2m}} ({ mathbf V} ^ {{2m}} - { boldsymbol {I}}) = { frac {1} {2m}} [({ boldsymbol {F}} { boldsymbol {F}} ^ {T}) ^ {m} - { boldsymbol {I}}] приблизительно { boldsymbol { varepsilon}} end {align}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3f23afe38e5f63d74050dbaf5d362b65b4da1ca0)



























![{ displaystyle left [{ begin {matrix} varepsilon _ {xx} & varepsilon _ {xy} & varepsilon _ {xz} varepsilon _ {yx} & varepsilon _ {yy} & varepsilon _ {yz} varepsilon _ {zx} & varepsilon _ {zy} & varepsilon _ {zz} end {matrix}} right] = left [{ begin {matrix} varepsilon _ {xx} & gamma _ {xy} / 2 & gamma _ {xz} / 2 gamma _ {yx} / 2 & varepsilon _ {yy} & gamma _ {yz} / 2 gamma _ {zx} / 2 & gamma _ {zy} / 2 & varepsilon _ {zz} end {matrix}} right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5cd420e9f68d44f0849d0453048377abd2d7f20e)



























![{ displaystyle { begin {align} I_ {1} & = mathrm {tr} ({ boldsymbol { varepsilon}}) I_ {2} & = { tfrac {1} {2}} { [ mathrm {tr} ({ boldsymbol { varepsilon}})] ^ {2} - mathrm {tr} ({ boldsymbol { varepsilon}} ^ {2}) } I_ {3} & = det ({ boldsymbol { varepsilon}}) end {align}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cdc12c6f3d7e5049f74857861c3178c3f6728d99)















![{ displaystyle { begin {align} varepsilon '_ {ij} & = varepsilon _ {ij} - { frac { varepsilon _ {kk}} {3}} delta _ {ij} left [{ begin {matrix} varepsilon '_ {11} & varepsilon' _ {12} & varepsilon '_ {13} varepsilon' _ {21} & varepsilon '_ {22} & varepsilon '_ {23} varepsilon' _ {31} & varepsilon '_ {32} & varepsilon' _ {33} end {matrix}} right] & = left [{ begin {matrix} varepsilon _ {11} & varepsilon _ {12} & varepsilon _ {13} varepsilon _ {21} & varepsilon _ {22} & varepsilon _ {23} varepsilon _ {31} & varepsilon _ {32} & varepsilon _ {33} end {matrix}} right] - left [{ begin {matrix} varepsilon _ {M} & 0 & 0 0 & varepsilon _ {M} & 0 0 & 0 & varepsilon _ {M} end {matrix}} right] & = left [{ begin {matrix} varepsilon _ {11} - varepsilon _ {M } & varepsilon _ {12} & varepsilon _ {13} varepsilon _ {21} & varepsilon _ {22} - varepsilon _ {M} & varepsilon _ {23} varepsilon _ { 31} & varepsilon _ {32} & varepsilon _ {33} - varepsilon _ {M} end {matrix}} right] конец {выровнено}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6a45a5c7b7b098ea36d3e9abd244afe070e3cb5d)





















![{ boldsymbol { varepsilon}} = { frac {1} {2}} [{ boldsymbol { nabla}} { mathbf {u}} + ({ boldsymbol { nabla}} { mathbf {u }}) ^ {T}]](https://wikimedia.org/api/rest_v1/media/math/render/svg/a120dd47853fdf623ed080096e75e2069e84c220)

![{ boldsymbol { omega}}: = { frac {1} {2}} [{ boldsymbol { nabla}} { mathbf {u}} - ({ boldsymbol { nabla}} { mathbf { u}}) ^ {T}]](https://wikimedia.org/api/rest_v1/media/math/render/svg/dcf990ac8f37393cf1f0835349a51872f9476ce7)












![{ boldsymbol { nabla}} times { boldsymbol { varepsilon}} = e _ {{ijk}} ~ varepsilon _ {{lj, i}} ~ { mathbf {e}} _ {k} otimes { mathbf {e}} _ {l} = { tfrac {1} {2}} ~ e _ {{ijk}} ~ [u _ {{l, ji}} + u _ {{j, li}}] ~ { mathbf {e}} _ {k} otimes { mathbf {e}} _ {l}](https://wikimedia.org/api/rest_v1/media/math/render/svg/13fbd0b77f6478a70d04b0f31759e5076ca30028)













