GL Mk. III радар - GL Mk. III radar
 GL Mk. III (B), с МКФ | |
| Страна происхождения | Великобритания |
|---|---|
| Введено | конец 1942 г. |
| Нет. построен | 876 B, 667 C |
| Тип | Направление АА |
| Частота | 2.750–2.855 ГГц |
| PRF | 420 |
| Ширина луча | ~ 8 градусов |
| Классифицировать | Максимум 32000 ярдов, 27000 ярдов против легкого бомбардировщика |
| Точность | ± 25 ярдов, ± 1/6 градус на 32000 ярдов |
| Другие имена | Радиолокационная станция ПВО, № 3 |
Радар, наводка, Mark III, или же GL Mk. III короче, был радар система, используемая Британская армия непосредственно направлять, или класть, зенитная артиллерия (AA). Модель GL Mk. III был не отдельным радаром, а целым семейством связанных конструкций, которые постоянно улучшались во время и после Вторая Мировая Война. Они были переименованы вскоре после их появления в конце 1942 года и стали Радар, АА, №3, и часто в паре с радар раннего предупреждения, АА № 4, который также выпускался в нескольких моделях.
Модель Mk. III началась разработка вскоре после появления резонаторный магнетрон в начале 1940 г. Магнетрон позволил радиолокационным системам работать на микроволновая печь частоты, что значительно уменьшило размер их антенн и сделало их более мобильными и точными. Первоначально начав работу над магнетроном в составе AI Mk. VIII радар класса "воздух-воздух", команде сказали бросить все и как можно скорее разработать радар для использования ПВО. Это обернулось фиаско; к концу года был достигнут очень небольшой прогресс, и группа вернулась к работе над бортовыми радиолокаторами.
Магнетрон также был продемонстрирован канадцам и США как часть Миссия Тизарда осенью 1940 года. Сразу после визита Национальный исследовательский совет Канады приступили к разработке радара GL на основе конструкции Великобритании. Первые примеры этих GL Mk. III (C) (для канадца) прибыл в Великобританию в ноябре 1942 года. Британские подразделения немного более совершенной конструкции, GL Mk. III (В) (для британцев) прибыл в декабре. Было произведено 667 канадских моделей, около 250 из них обслуживались в Великобритании, в то время как большинство других были отправлены на континент или остались в Канаде. Было выпущено 876 британских моделей, получивших широкое распространение. Пятьдесят Mk. III были поставлены на Советский союз.
Несколько улучшенных версий Mk. III (B) экспериментировали, но ни один из них не получил широкого распространения из-за введения в 1944 г. SCR-584 из США, которые обеспечивали сканирование и отслеживание в одном полуприцепе. Mk. III подразделения оказались отнесены к второстепенным ролям, столь же разнообразным, как обнаружение артиллерии, прибрежное наблюдение и метеозонд наблюдение. Для этих ролей было выполнено несколько модернизаций, и модифицированные погодные единицы использовались примерно до 1957/58 гг. Более радикальное развитие конструкции привело к значительному улучшению послевоенного РЛС ЗА №3 Мк.7, который служил в качестве основного радара ПВО до снятия с вооружения зенитных орудий в конце 1950-х годов.
Разработка
Более ранние системы
Армия начала серьезные исследования в области радиолокационных систем в 1937 году после ознакомления с разработками, сделанными Министерство авиации на их экспериментальной станции в Усадьба Боудси. Среди нескольких возможных применений радара армия увидела в нем способ удовлетворить насущную потребность в точном измерении дальности до воздушных целей. Это решалось с помощью оптических средств, которые были сложными, трудоемкими и подверженными ошибкам, и радиолокационная система могла значительно улучшить эту задачу. Перед командой разработчиков, получившей прозвище «Армейская ячейка», была поставлена задача создать систему, которая обеспечила бы наклонный диапазон измерения с точностью 50 ярдов (46 м) или лучше.[1]
В результате появилась громоздкая система, известная как GL Mk. Я радар. Модель Mk. Я люблю Сеть Главная Технология, на которой она была основана, использовала отдельные передающие и приемные антенны, которые необходимо было перемещать синхронно для отслеживания целей. Система не обеспечивала точного измерения пеленга и не предусматривала измерения высоты. Тем не менее, он отвечал требованиям к точности в 50 ярдов по дальности, мерой, которая автоматически вводилась в аналоговые компьютеры который занимался баллистика расчеты. Характеристики орудия сразу улучшились; до прибытия Mk. Было подсчитано, что для уничтожения одного самолета потребовалось выпустить 41 000 снарядов; использование Mk. Я вместе с улучшенной подготовкой сократил это количество до 18500 к концу 1940 года.[2]
Планируется добавить измерения пеленга и высоты для Mk. II, который должен был быть готов где-то в 1941 году. Когда стало ясно, что потребность в нем более острая, Лесли Бедфорд из А.С. Коссор предложил добавить на Mk. Я должен как можно скорее выпустить его на поле боя. Это стало системой GL / EF, которая поступила на вооружение в начале 1941 года и привела к огромному снижению количества выстрелов на убийство до 4100, что впервые сделало зенитный огонь эффективным. Mk. II, который предлагал немного более высокую точность, уменьшил это количество до 2750 выстрелов на убийство, когда он начал поступать в 1942 году.[2]
Микроволны
Основной причиной громоздкости ранних систем GL был побочный эффект используемых ими радиочастот. GL был разработан в эпоху, когда единственная доступная электроника была адаптирована из коммерческих коротковолновый радиосистемы и работали на длинах волн порядка 5-50 м. Основным результатом радиофизики является то, что антенны должны иметь размер, примерно равный используемой длине волны, что в данном случае требует антенн длиной в несколько метров.[а]
В Адмиралтейство был назначен ответственным за вакуумная труба (клапан) разработка для военных нужд.[3] Их особенно интересовал переход на гораздо более короткие длины волн как способ обнаружения более мелких объектов, особенно боевые рубки и перископы из Подводные лодки. Воздушно-десантная группа Министерства авиации во главе с Эдвард Джордж Боуэн У него была противоположная проблема - антенны, достаточно маленькие, чтобы их можно было установить в носовой части двухмоторного самолета. Им удалось приспособить экспериментальный телевизионный приемник к 1,5 м, но для этого по-прежнему требовались большие антенны, которые приходилось устанавливать на крыльях. На встрече Боуэна с сотрудниками экспериментального отдела Адмиралтейства. Чарльз Райт, они нашли много причин, чтобы согласиться с необходимостью системы с длиной волны 10 см.[4]
Учитывая поддержку развития микроволнового излучения обоими службами, Генри Тизард посетил General Electric Company's (GEC) Исследовательский центр Херста в Уэмбли в ноябре 1939 г. для обсуждения вопроса. Некоторое время спустя Ватт нанес личный визит, что привело к заключению 29 декабря 1939 года контракта на поставку микроволнового ИИ-радара, использующего обычную ламповую электронику. Тем временем Комитет по развитию коммуникационных клапанов (CVD) Адмиралтейства обратился к Бирмингемский университет разработать совершенно новые конструкции трубок, которые могут привести к лучшим результатам.[5]
Магнетроны

Бирмингема Марк Олифант Первоначально атаковал проблему, пытаясь развить клистрон, довоенное изобретение, которое было одной из первых успешных ламп СВЧ. Несмотря на многочисленные попытки, к концу 1939 года их лучшие клистроны вырабатывали всего 400 Вт, что намного ниже того, что необходимо для использования в радарах.[5]
Два второстепенных члена команды, Джон Рэндалл и Гарри Бут, попросили взглянуть на другую концепцию, которая также не созрела. Оставшись без дела, они начинают рассматривать альтернативные решения. Они пришли к идее использования нескольких резонансных полостей, расположенных по кругу за пределами общего центрального ядра, в отличие от линейного расположения клистрона. Их самый первый резонаторный магнетрон произвел 400 Вт, а в течение недели был увеличен до 1 кВт. Через несколько месяцев у GEC появились модели, генерирующие импульсы мощностью 10 кВт. Вскоре они были использованы при разработке новой бортовой радиолокационной системы, первоначально известной как AIS, для воздушного перехвата, Sentimetric [sic].[6]
Тем временем армия несколько раз посещала GEC в течение 1940 года и наблюдала за их успехами, используя обычную ламповую электронику на более коротких волнах. Путем ряда шагов компании GEC удалось уменьшить рабочие длины волн своих систем с 1,5 м, исходной частоты бортового радара, до 50 см, а затем и до 25 см. Их можно использовать в направленной системе с антенной размером в метр или меньше. В отличие от воздушно-десантной группы, которой требовались даже более короткие длины волн для создания очень маленьких антенн, которые могли бы поместиться в носовой части самолета, или военно-морского флота, которым требовалась система с достаточным разрешением для приема перископов, армия искала только практическое улучшение точности и меньших размеров антенн. Этого можно добиться с помощью решения GEC.[7]
В августе 1940 г.[8] армия выпустила спецификацию на новый радар GL, который сочетал в себе УКВ-набор, такой как Mk. II с системой слежения за СВЧ-частотами с высокой точностью. Требовалось:
- начальный захват для раннего предупреждения с расстояния 30 000 ярдов
- пикап для наведения на 22000 ярдов
- точная дальность до любой цели между 2000 и 17000 ярдов, хотя более короткий максимум 14000 ярдов был приемлемым
- ширина луча в идеале 10 градусов, но максимум 14 градусов
- возвышения от 10 до 90 градусов над горизонтом, с возможностью сопровождения до 70 градусов
П. Э. Поллард из Научно-исследовательский центр ПВО в Крайстчерч, Дорсет был одним из первых, кто рассмотрел радар еще в 1930 году, и работал с "Армейской ячейкой" в Экспериментальная станция Министерства авиации некоторое время, прежде чем присоединиться к другим армейским исследователям в Крайстчерч, Дорсет. Они выбрали Британский Томсон-Хьюстон (BTH), который построил более ранние 5-метровые наборы GL, чтобы построить прототип.[7] Поллард переехал на заводы BTH в Регби, Уорикшир работать по новой системе.[8]
Клистрон отказ
Когда Альберт Персиваль Роу Директор радиолокационных групп Министерства авиации, узнав об усилиях армии в сентябре 1940 года, он приступил к созданию собственной разработки GL с использованием магнетрона. После встречи 22 сентября с Филип Жубер де ла Ферте, старший командующий ВВС Великобритании, Роу построил группу GL под руководством Д. М. Робинсона, используя нескольких членов команды AIS, сказав им, что им придется сосредоточиться на проблеме GL в течение следующих месяцев или двух.[7]
Это привело к увеличению трения между Филип Ди, который руководил работой группы ИИ по магнетрону, и Роу, который руководил исследователями Министерства авиации. Ди утверждал, что Роу «воспользовался этой возможностью, чтобы попытаться украсть проблему GL из ADEE» (армейской ячейки), и что «только Ходжкин спокойно работает с AIS, а Ловелл и Уорд, к счастью, заняты основной работой с антеннами и приемники и поэтому их относительно не беспокоит эта новая заслонка ".[7] По словам Ловелла, это не было таким серьезным потрясением, как полагал Ди. Более того, до некоторой степени работа клистрона в Бирмингеме продолжалась благодаря усилиям армии GL.[9]
Основной проблемой для адаптации концепций AI к проблеме GL была угловая точность. В случае с искусственным интеллектом оператор радара мог отслеживать цель с точностью около 3 градусов, улучшаясь до 1 градуса на близком расстоянии.[10] Этого было более чем достаточно для пилота, чтобы увидеть цель близко к цели, как только они приблизились на расстояние около 1000 футов (300 м). При наведении орудия на большие расстояния операторы могут никогда не увидеть цели, поэтому точность должна быть не ниже1⁄2 степень, и1⁄10 позволил бы наводить орудия исключительно радаром.[11]
Решение для обеспечения гораздо более высокой угловой точности было уже известно, метод, известный как коническое сканирование. Вскоре после того, как Ловелл начал работать над такой системой, Эдгар Ладлоу-Хьюитт Генеральный инспектор Королевских ВВС посетил Роу. После визита Роу сказал команде, что полный набор GL должен быть готов для установки на оружие в течение двух недель.[9] К 6 ноября Робинсон собрал прототип системы, но к 25 ноября он отправил записку Роу и Льюису (помощнику Роу), в котором говорилось, что за последние 19 дней система работала только 2 дня из-за большого количества проблем. В декабре ему сказали передать выполненную работу в BTH для разработки в развертываемую систему. 30 декабря 1940 года Ди заметил в своем дневнике:
Фиаско GL закончилось тем, что все предприятие было перемещено целиком в BTH, включая двух сотрудников AMRE. У Лисона никогда ничего не работало должным образом, и Робинсон считает, что для Льюиса было очень полезно узнать, насколько на самом деле все основные техники ошибочны.[9]
Магнетрон GL
В рамках Миссия Тизарда в августе 1940 г. первый магнетрон был продемонстрирован представителям обеих стран. Национальный комитет оборонных исследований (NDRC), а также канадский Национальный исследовательский совет (NRC). Команды из США и Канады вскоре установили постоянные контакты и разделили свои усилия, чтобы избежать дублирования работы. Штат из шести канадцев, предоставленных на правах аренды от NRC, остался в Радиационная лаборатория через войну.[12]
23 октября 1940 года группа NRC получила телеграмму из Англии с просьбой начать работу над системой GL с использованием магнетрона.[12] Требования требовали дальности слежения до 14 000 ярдов (13 000 м) с точностью дальности 50 ярдов (46 м), хотя они хотели, чтобы она составляла 25. Они также хотели режим поиска с неопределенной дальностью с точностью дальности. 250 ярдов (230 м). Угловая точность должна быть не менее1⁄4 градусов по обеим осям, но1⁄6 было желанным. Все выходы должны были напрямую управлять журналами.[11]
Как ни странно, учитывая зачаточное состояние разработки радаров в NRC в то время, Великобритания в значительной степени не участвовала в дальнейшей разработке. Хотя информация о развитии системы GL продолжала поступать в Канаду, мало экономической или научной поддержки оказывалось до 1943 года, когда NRC значительно расширило свой офис связи в Лондоне. Такое отсутствие координации серьезно задержит канадское производство многих радиолокационных систем.[13] Напротив, канадско-американская группа связи уже согласилась с тем, что США должны сосредоточиться на более сложной системе, в то время как канадцы работали над своей базовой конструкцией.
Кроме того, к январю 1941 г. Министерство снабжения отказался от продолжающихся усилий армии в Великобритании и выпустил новую спецификацию для GL на основе магнетрона.[9] Это означало, что предыдущие усилия по разработке обычного передатчика были напрасны. С другой стороны, к этому времени поставки магнетронов улучшались, и использование одного из них позволило бы создать радар, работающий на еще более коротких длинах волн и гораздо более высокую мощность, улучшая как дальность, так и точность. В конце концов, 31 мая 1941 года БТН поставил экспериментальную маломощную «модель А».[b] хотя это была далеко не готовая к эксплуатации система.[8]
GL Mk. III (C) конструкция



Канадский дизайн стал известен как Accurate Position Finder, сокращенно APF. В то время решение быстрого переключения микроволнового сигнала между двумя антенными выводами не было решено. В результате не было возможности использовать одну антенну как для передачи, так и для приема, и команда первоначально рассматривала системы с одним передатчиком и одним приемником или одним передатчиком и четырьмя приемниками. Изобилие антенн не было большой проблемой для роли GL; отражатели были около метра в поперечнике, что было не слишком большим для наземной системы, особенно с учетом многометровых антенн GL Mk. Я бы заменил.[14]
В то время никто не знал, «как спроектировать волновод с вращающейся точкой с низкими потерями»,[15] поэтому проблема подачи микроволновой энергии от магнетрона к вращающимся антеннам не имела очевидного решения. Вместо этого они решили принять решение, используемое для предыдущих наборов GL, и смонтировать всю свою электронику ван на опорной плите и указать его в нужном направлении. Это сильно усложнило трейлер, а хрупкость плохо спроектированных трейлеров стала серьезной проблемой для австралийских пользователей.[16]
Ключевое отличие Mk. IIIc и более ранние Mk. II возник из-за отсутствия ЭЛТ для дисплеев. Модель Mk. II имел три ЭЛТ, по одному для дальности, азимута и высоты. Дисплеи высоты и азимута отображали только одну выбранную цель, выбранную оператором дальности, а затем отображали сигналы от восходящей и нижней антенн на одном дисплее и слева и справа на другом. Операторы сравнили длину вспышки чтобы определить, какой из них длиннее, и повернуть кабину в том же направлении. В IIIc индикация высоты и азимута была заменена механическими указателями, управляемыми электрической разницей в двух сигналах.[17]
Отсутствие подходящего радар раннего предупреждения Подобно MRU британской армии, NRC также разработала вторую радиолокационную систему, известную как индикатор положения в зоне (ZPI). Это было быстро разработано с использованием базового дизайна, скопированного с ASV Mk. II радар который был поставлен в рамках попытки начать производство радаров ASV для ВМС США и Береговая охрана. Наборы ASV были основаны на обычной ламповой электронике и работали в диапазоне 1,5 метра, который был обычным для британских радаров в начале войны. Поскольку APF действовал на расстоянии 10 см, две установки не мешали друг другу и могли работать на расстоянии всего метра. В процессе работы ZPI будет передавать информацию в APF, который будет использовать эту информацию для поиска целей. ZPI был первым радаром полностью канадской конструкции.[18]
Несмотря на отсутствие тесной координации со своими британскими коллегами, NRC завершила разработку своей версии системы GL в июне 1941 года.[12] Первая полная демонстрация всей системы была проведена для канадских официальных лиц 27 июня и снова для официальных лиц США, прибывших 23 июля. В то время главный инженер Westinghouse оказался чрезвычайно впечатлен и отметил члену NRC, «что его компания не поверила бы, что то, что мы сделали за девять месяцев, можно было сделать за два года».[18]
GL Mk. III (C) производство
Несмотря на отличный старт с точки зрения дизайна, производство блоков вскоре столкнулось со специфической канадской проблемой военного времени. Сразу после начала боевых действий генерал Эндрю Макнотон, командующий канадскими войсками в Европе, призвал правительство создать компанию для снабжения канадских войск различным оптическим оборудованием, таким как бинокль. Их не хватало во время Первая Мировая Война, и Макнотон пытался предотвратить повторение той же проблемы. CD. Хау, то Министр всего, создайте новый Crown Corporation, Research Enterprises Limited (REL), чтобы заполнить эту потребность.[19] Когда потребность в электронике привела к необходимости создания аналогичной компании, Хоу решил расширить REL. REL доказал свою эффективность в области оптики, но когда они расширились до электроники, начались проблемы.[20]
Первый заказ на 40 комплектов GL был размещен в январе 1941 года, до того, как NRC завершила разработку. За этим заказом последовало несколько дополнительных заказов из Канады, Великобритании, Австралии, Южной Африки и других стран. Сроки поставки неоднократно переносились, поскольку у REL были проблемы с выполнением нескольких ранее заключенных контрактов на другие радарные системы. Первый серийный образец не сошел с конвейера REL до июля 1942 года, когда стало ясно, что проблема существует, и на подразделение электроники было оказано давление, чтобы ускорить поставки.[20]
К этому моменту единственный прототип прибыл в Великобританию в январе 1942 года. Он был отправлен в канадскую армию и был замечен британскими специалистами по радиолокации лишь некоторое время спустя. Когда это произошло, система отображения с использованием механических указателей оказалась проблемой. Теоретически это было проще и дешевле, но он также заменял систему, которая уже была хорошо известна Mk. II операторов, требующих переподготовки. Другая проблема заключалась в том, что канадские конструкторы добавили систему «скоростной прокладки», которая сглаживала входные сигналы на управляющие колеса, что позволило более точно отслеживать, но это было еще одним изменением, к которому нужно было привыкнуть. Несмотря на эти проблемы, для версий для Великобритании по-прежнему не было даты поставки, и, вероятно, из-за давления со стороны Lindemann был размещен заказ на дополнительные 560 экземпляров, в результате чего общее количество в Великобритании достигло 600.[17]
Первая партия комплектов GL прибыла в Великобританию в ноябре 1942 года.[20] Когда они прибыли, агрегаты оказались совершенно ненадежными. Это привело к раунду споров между командой NRC и REL. REL пожаловался на то, что NRC обработало более 300 заказов на изменение конструкции, пока производство было налажено.[18] заполнение связующим. NRC, с другой стороны, было убеждено, что проблема полностью связана с Р.А. Хакбуш, директор отдела электроники REL. Макнотон лично участвовал в этом, и ему пришлось вызвать подполковника. У. Э. Филлипсу, директору REL, за личное интервью о проблемах. Он отметил в своем дневнике, что Филипс заявил:
... и сказал, что в эти дни наблюдается общее ухудшение нервной системы, люди устали, и было много потери контроля ... Это было очень интересное интервью.[21]
Пытаясь разобраться в ситуации, Маккензи из NRC организовала для полковника Уоллеса посещение REL 11 ноября 1942 года. Уоллес начал разговаривать с людьми в цехе, и в конце концов один суперинтендант сказал ему, что Хакебуш лично приказал ему сосредоточиться на количестве, а не на качестве, чтобы системы не тестировались перед доставкой. Также стало ясно, что Хакебуш скрыл это от Филлипса в предыдущих сообщениях.[21]
Несмотря на это и продолжающиеся отказы на местах, никаких действий по устранению проблемы не было немедленно предпринято. Во время визита в Оттаву в марте 1943 года Филлипс встретился с Маккензи и Уоллесом и согласился с тем, что проблема реальна, признав «все слабые стороны Хакбуша и [сказал], что они собираются внести фундаментальные изменения, которые, как мы все знаем, назрели по крайней мере два года."[21] Но по-прежнему ничего не было сделано. Только 2 сентября Филипс был «вынужден принять отставку [Хэкбуша]». Неделю спустя Уоллес получил эту работу, хотя он также оставался директором радиовещания в NRC. Когда Маккензи посетил REL 30 марта 1944 года, он сообщил, что компания была полностью реорганизована.[22]
В дополнение к их проблемам, REL постоянно не хватало магнетронов, которые были построены General Electric в США, ЭЛТ для дисплеев или множества других обычных электронных ламп, которые использовались в системе. Затем, в разгар разработки, Великобритания потребовала обновить систему для поддержки МКФ использовать.[15] Не имея собственного блока IFF, использовались британские аппараты, которые, как оказалось, мешали ZPI, работавшим на аналогичных частотах.[23]
Несмотря на все эти проблемы, к концу 1942 года REL поставила 314 комплектов, которые быстро заменили старые Mk. II устанавливается на огневых позициях AA по всей Великобритании. Базирующиеся в Великобритании НПФ составляли основу лондонского направления AA во время Операция Steinbock в начале 1944 года были предприняты последние согласованные немецкие бомбардировки с использованием пилотируемых самолетов.[24] Одним из первых применений III (C) в Канаде была поисковая система на поверхности для обнаружения подводных лодок в Река Святого Лаврентия.
К 1943 году потребность в Mk. III иссяк с неизбежным прибытием единиц SCR-584 из США. Великобритания отменила свой заказ в январе 1944 года, что стало серьезным ударом для REL.[25] Из 667 Mk. III (C) были в конечном итоге завершены, 600 были отправлены в Великобританию, при этом около половины из них были использованы в полевых условиях в Европе в качестве мобильных единиц, а другая половина - на статических огневых позициях в Великобритании. Небольшое количество Mk. III (C), отправленные в Австралию, оказались практически непригодными для использования в доставленном виде, и их пришлось тщательно перестраивать, чтобы они могли работать.[26]
GL Mk. III (B) производство

После того, как в апреле 1941 года была поставлена первая экспериментальная установка магнетрона, BTH продолжили разработку своей Mk. III, представив модель B в июле 1941 года. Это привело к заказу на 28 прототипов ручной сборки, пять из которых были поставлены в период с декабря по апрель 1942 года, а к концу года осталось только восемь. Наряду с заказом на прототип, в июле 1941 года был размещен заказ еще на 900 серийных моделей. Этот последний заказ был позже увеличен до 1500, по 500 каждый от BTH, Стандартные телефоны и кабели и Ферранти. Первая из этих моделей прибыла в декабре 1942 года.[8]
Поскольку BTH's Mk. Конструкция III (B) была заморожена позже, чем у канадской модели. В нее был внесен ряд улучшений, сделавших ее более практичной. Основным среди этих отличий было крепление антенн на большой металлической опоре. ротор, который спускался через крышу на пол трейлера, где он находился в опоре. Вместо того, чтобы пытаться повернуть микроволновую подачу, III (B) установил радиочастота компоненты на мачте, а затем подавали на них питание через обычные щеточные устройства. Это позволило антеннам, расположенным наверху мачты, легко вращаться под контролем оператора, вращающего большой маховик. Это избавило от необходимости поворачивать всю кабину и значительно упростило тележку.[27]
Также изменился ряд других деталей, в частности, устранена электроника, необходимая для сравнения сигналов влево / вправо и вверх / вниз, а также отсутствует система "наведения скорости". Это уменьшило количество клапанов со 120 до 60, что было серьезной проблемой в ту эпоху, что сделало получившуюся конструкцию меньше, более мобильной и примерно вдвое дешевле.[28] Незначительным изменением было использование тканевых покрытий, натянутых на антенну и прикрепленных к внешнему краю параболических отражателей. С установленными крышками сборки выглядят как два плоских диска, что позволяет легко отличить их от канадской версии.
Именно в этот момент Фредрик Линдманн Он не был впечатлен зенитным огнем и заявил, что в результате бомбардировок домов людей, которые их производили, будет уничтожено больше немецких бомбардировщиков, чем может рассчитывать любое количество орудий с радарным наведением. Он предложил отменить производственный заказ, чтобы британские фирмы могли сосредоточиться на H2S радар это дало бы британским бомбардировщикам возможность беспрепятственно работать над Германией, и низвести радары ПВО к канадской модели, которая в любом случае казалась доступной быстрее.[8]
В этот момент возникла нехватка электронных клапанов ("трубок"), поскольку все службы в Великобритании требовали новых радарных систем. Фредерик Альфред Пайл генерал, отвечающий за AA, не питал иллюзий относительно того, где армия вписывается в график приоритетов. Задержки затягивались, и только в конце 1943 года было достаточно запасов для запуска полномасштабного производства.[28]
На этом этапе был размещен второй заказ на 2000 единиц. Однако общее производство в 1944 году составило всего 548 единиц. К этому времени начали поступать американские SCR-584, которые были значительно лучше Mk. III (B), поэтому производство было намеренно замедлено. Когда производство закончилось в апреле 1945 года, всего было поставлено 876 машин.[29] Некоторые из них также включали допросы для МКФ Марк III, который можно отличить по двум большим штыревые антенны простирается от крыши задней кабины.
В полевых условиях было замечено, что III (B) может подбирать ступка выстреливает на расстоянии около 5000 ярдов (4600 м). Зная положение снаряда в нескольких точках во время полета, можно было рассчитать, откуда он был запущен.
GL Mk. III (B) версии
Mk. III (B) несколько раз модернизировался в процессе производства, хотя эти более поздние версии широко известны более поздним AA No. 3 Mk. 2, модель Mk. 1 - это III (C).[c]
Модель Mk. В версии 2/1 добавлено автоматическое отслеживание, что позволило оператору зафиксировать на к цели, а затем электроника будет автоматически следовать за ней без дальнейшего ручного вмешательства. / 2 была двухрежимной системой, дисплеи которой можно было использовать для противовоздушной обороны или в качестве береговой обороны. / 3 также имел следование за замком, но использовала модель, разработанную командованием ПВО, а не армейским Центр исследований и разработок радаров (RRDE). / 5 был / 2 с той же привязкой, что и / 3. Самолет AA No. 3 Mk. 2 (F) был немодифицированным № 3, используемым полевой армией в качестве радар обнаружения миномета.
Это был AA No. 3 Mk. 2/4, что позволило использовать оригинальный Mk. III дизайн. Это был AA No. 3 Mk. 2 с дополнительной схемой, которая позволяла смещать временной интервал на эквивалент 30 000 ярдов (27 000 м) или 60 000 ярдов (55 000 м). Это обеспечило три набора диапазонов: от 0 до 32 000, от 30 000 до 62 000 и от 60 000 до 92 000 ярдов. Эта версия использовалась в качестве метеорологической системы для измерения ветра на высоте путем запуска метеорологические шары с отражатели радаров это позволяло отслеживать их в течение длительного времени. Mk.2 / 4 широко использовался в этой роли до конца 1950-х годов.
Другие радары GL
При разработке Mk. III затянулась, армия начала экстренную программу по разработке промежуточной системы, использующей ту же электронику диапазона 1,5 м, которая широко используется в других радарах. Известный как «Малышка Мэгги», неясно, был ли ему присвоен номер в оригинальной серии GL, хотя он был назван с использованием новой номенклатуры как AA No. 3 Mk. 3.[31]
В Королевская артиллерия Историк отмечает, что «Малышка Мэгги» возникла в средиземноморском театре с 62-я зенитная бригада, который командовал частями ПВО в Союзное вторжение на Сицилию (Операция Хаски). Он был задуман как легкая альтернатива громоздким двухкабинным комплектам GL, способным приземляться на открытых пляжах. Импровизирован из существующих Радар управления прожектором (SLC), а его передатчик, приемник, антенная решетка и рабочий дисплей были размещены в одном двухколесном прицепе, буксируемом 3-тонным грузовиком. Он имел максимальную дальность обнаружения 20 000 ярдов (18 000 м) в зависимости от местоположения, а для целей артиллерийской стрельбы мог отслеживать с 14 000 ярдов (13 000 м) внутрь. Двенадцать комплектов были выданы тяжелым войскам ПВО, развернутым на первом этапе высадки хаски, и снова использовались для высадки в Салерно (Операция Лавина ). Показатели Малышки Мэгги в действии были разочаровывающими не из-за каких-либо дефектов радара, а из-за механической неисправности, вызванной грубым движением. Шасси прицепа было перегружено, и на крутых склонах верх кабины задел тягач, что привело к повреждению. Он был заброшен после Салерно.[32]
Ряд источников утверждает, что в СССР было отправлено 50 бэби-Мэгги. Совпадают ли они с сообщениями о 50 GL Mk. III, или если 50 Baby Maggie и еще 50 Mk. III (B) были отправлены, остается неясным. Некоторые подразделения в послевоенное время использовались в Индии для слежения за метеозондом.[33]
Развитие танка Mk. III продолжалась в течение всего периода развертывания SCR-584. Это привело к появлению в 1944 году новой модели - AA No.3 Mk. 4, кодовое название «Glaxo». На последних этапах войны было произведено всего несколько Glaxos.
Дальнейшее развитие того же дизайна под кодовое имя радуги "Blue Cedar" произвела чрезвычайно удачную конструкцию, которая поступила на вооружение как AA No. 3 Mk. 7. Mk. 7 оставался в использовании в качестве основного радара наводки орудий Великобритании до тех пор, пока большие зенитные орудия не были сняты с вооружения в конце 1950-х годов. Модель Mk. 7 также использовался в качестве осветителя для раннего движения луча. ракета земля-воздух, Тормозная мина.[34]
Описание
Это описание основано на британском Mk. III (B) модель. В целом Mk. III (C) будет аналогичным, за исключением деталей механического устройства прицепа и кабины.
Схема оборудования
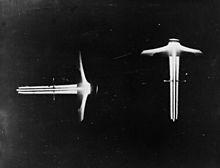
Модель Mk. III был построен на пятитонном четырехколесном прицепе производства Таскеры Андовера. Кабина построена Метро Каммелл, строитель железнодорожных вагонов. Палуба фронта1⁄4 Прицеп был высотой по пояс, что давало возможность управлять передней осью во время буксировки. Сразу за колесами шасси ступило вниз, при этом задняя часть была ближе к земле. Основная каюта была расположена наверху этой нижней секции, с крылья обеспечение зазора вокруг задних колес.
Антенны радара были установлены на большом металлическом столбе, выходящем из верхней части кабины. Сложный каркас прямо над крышей позволял антеннам поворачиваться по вертикали под управлением рычага, установленного за правым параболическим отражателем (блюдо). Две тарелки были установлены по обе стороны от столба с зазором между ними. IFF antennas, if mounted, extended from the two upper rear corners of the cabin. The higher front area of the trailer mounted a generator as well as wooden boxes for storage of spares and tools.
To set up for operation, the trailer was parked on suitably flat land and the brakes were locked. Three levelling jacks were then swung out from the trailer, one on either side at the front where the step in the chassis met the cabin, and another from the rear of the cabin. The jacks were then used to level the cabin using уровни духа. The radar dishes were then raised, the generator started, and operations could begin. The entire setup took about 20 minutes, with 3 minutes required to warm up the electronics.
The entire system, including trailer, weighed over 9 long tons (9,100 kg), was 14 feet (4.3 m) high with the antennas raised or 12.5 feet (3.8 m) with them lowered for transport, was just over 22 feet (6.7 m) long and 9.5 feet (2.9 m) wide, extending to 15.5 feet (4.7 m) wide with the levelling jacks deployed.
Signal details
The system was driven by a 440 Hz motor driven генератор mounted on the front of the cabin.[27] This powered the electronics, as well as a motor in the receiver dish that spun the antenna at 440 rpm. The same motor also drove a small two-phase alternator whose relative phases rotated in synchronicity with the receiver antenna.[35]
The transmitter consisted of a single magnetron, initially 100 kW but up to 350 kW in later versions. It produced a 1 microsecond pulse at the same 440 Hz rate as the main alternator. Это произвело pulse repetition frequency (PRF) of 440 Hz, very low for a radar of this type.[36] For comparison, the German Вюрцбургский радар, the Mk. III's counterpart, had a PRF of 3,750, which provides a much better signal on reception.[37]
The receiver consisted of two супергетеродинный единицы. The first used a tunable клистрон и кристаллический детектор to produce an промежуточная частота (IF) of 65 MHz which then went through a two-stage amplifier. The result was then mixed down to a new IF of 10 MHz and into a three-stage amplifier. Заключительный выпрямитель produced a signal that was fed directly into the Y-axis deflection plates of the CRTs.[27]
Which CRT to feed the signal two was controlled by the phase of the smaller alternator. The output was sent into a switchbox that compared the relative phase of the two signals, sending it out one of four outputs, rotating from up to right, bottom and left. The right and up channels were passed through delays.[35]
Дисплеи и интерпретация

The Mk. III used a somewhat complex multi-электронно-лучевая трубка (CRT) display system known as the Presentation Unit, построен Граммофонная Компания (EMI ).
Typical radar displays of the era measured range by comparing the вспышка of the return against its position on the CRT face. Measuring against a scale might offer range accuracy on the order of 200 to 400 yards (180–370 m) on the Mk. III's 6 inches (15 cm) CRTs, far less accuracy than needed for the gun laying role. To solve this problem, the Mk. III used two range displays, coarse and fine. The coarse display, placed about eye level in the console, was a classic A-scope display, showing all the blips within the range of the radar, normally 32,000 yards (29,000 m).[35]
A large handwheel projecting from the console about knee level rotated a large потенциометр whose output was sent into a large конденсатор. When the capacitor reached a pre-selected voltage, it triggered a second timebase generator set to 6 microseconds, or in the case of the radar's there-and-back round trip, 1,000 yards (910 m). The output of this time base was inverted and mixed into the signal on the coarse display, causing an bright extended line to appear along the bottom of the baseline, known as the стробоскоп. As the operator turned the handwheel, the strobe moved back and forth along the display, allowing the selection a particular target by centring it within the strobe.[35]
Moving the strobe allowed the range operator to select targets within the 1,000 yard "window". This window filled the fine range display; this was also a 6 inch display so on this display every inch represented about 50 metres (160 ft), offering much greater accuracy. In operation, the operator would continually turn the handwheel in an effort to keep the blip exactly centred in the display, as measured against a fine metal wire stretched over the face of the tube. This allowed continual range output with an accuracy on the order of 25 yards (23 m), more than accurate enough for the gun laying role. To the right of the fine display was a mechanical dial with a large pointer that displayed the current range as selected by the handwheel.[35]
An even faster timebase, 4 microseconds long, was triggered at the center of the strobe. Only those signals in this 650 yards (590 m) window were sent to the elevation and bearing displays, so their displays showed only the single blip selected in the strobe. This eliminated the need for them to have a course display. Instead, their stations had only the equivalent of the fine display, repositioned at eye level to make reading easier. The vacant display location in the lower panel where the fine display would normally be was instead used to hold the mechanical dials that displayed the current bearing or altitude. The bearing operator sat to the left of the range operator, and the altitude operator to his left. This allowed a single operator at the range display to reach the bearing handwheel with ease, although the altitude wheel was somewhat of a reach.[35]
Although this method of scanning allowed accurate measurement of the angle of the target, it did not directly indicate which direction to turn the antenna to center it – this could be seen in the rising and falling blip strength, but in practice, this was far too fast to follow visually. This is where the electrical delays on the switchbox came into play. By delaying the right signal compared to the left, the resulting display shows two peaks separated horizontally. These would be roughly centered depending on the accuracy of the range operator. The higher blip was in the direction to turn; if the left blip was larger, the operator needed to turn the antenna to the left. the up/down display worked the same, although the operator had to "rotate" the image in their head.[35][d]
Operational technique
Given the limited angle that the Mk. III scanned, 10 degrees at most, the system was normally paired with a second radar with a much wider scanning pattern. In the case of the AA No. 4, this provided a complete 360 degree scan that was displayed on a plan-position indicator.[38] The operators of this second radar would call out contacts to the Mk. III operators, who would spin their antenna to the indicated bearing and then move the antenna vertically to find the target. When a blip was seen on the coarse range display, the range operator would move the strobe into position, and from then on all of the operators would move their controls continuously to create smooth tracking.[35]
The range control was connected to a potentiometer and measured range electronically. The elevation and azimuth was measured via the physical position of the antenna. Turning the handwheels at these positions drove the ротор assembly through selsyn motors, and the current position was fed back to the operator display using magslips, better known today as synchros. The output of the magslips was also amplified and sent to external connectors, where they could be used to create additional displays at remote locations. These were normally sent into the inputs of the gunnery аналоговые компьютеры, известный как предсказатели.[36]
Использование IFF
As early as 1940 some British aircraft were equipped with the IFF Mk. II system, and by the time the Mk. III radars were being introduced in 1943, many aircraft were equipped with IFF Mk. III. Они состояли из транспондер installed on the aircraft that was tuned to a pre-selected frequency, and when it heard a signal on this frequency, sent out a short signal of its own on a different pre-selected frequency.[39]
GL Mk. III was optionally equipped with the corresponding следователь. When the radar operator pressed a button, the interrogator would send out periodic signals on the selected frequency via a large штыревая антенна mounted at the rear corner of the cabin. The responding signal from the transponder was received on a second antenna on the opposite rear corner of the cabin, amplified, and sent into the displays. This signal mixed with the radar's own receiver, causing the new signal to be displayed directly behind the blip. Instead of a sharp кривая колокола like shape, a signal responding to the IFF challenge would have a rectangular extension behind it, allowing the operator to easily see which aircraft were friendly.[40][41] In practice, IFF selection was often handled by the search radar before they handed off to the GL, and the IFF fittings on GL were not universal.
Meteorological use
The Mk. III's longest lasting use was for meteorological measurements of winds aloft by tracking отражатели радаров hung from weather balloons. To measure speed, a секундомер was mounted near the range display and readings were made every minute.
As the balloons often blew out of the radar's nominal 32,000 yard range, these versions were equipped with a Range Extender device. This was a monostable multivibrator, known as a One-Shot or Kipp Relay, that triggered the coarse time base, offsetting its starting point so it did not trigger immediately after the transmission, but a selected time after that. The Extender had settings for 30,000 or 60,000 yards, so the system could track the balloons in three general windows, 0 to 32,000 yards, 30,000 to 62,000, and 60,000 to 92,000.
These units were produced after the naming had been changed, and were universally known as AA No. 3 Mk. 2/4.
Примечания
- ^ Finding a single reference that clearly states this well known fact is difficult, although the physics involved can be understood in the Уравнение передачи Фрииса и Chu–Harrington limit. A complete development is found in The ARRL Antenna Book.
- ^ Other sources, including Wilcox, put the date in April.
- ^ The nomenclature appears to have been changed in the autumn of 1943 or 1944. The only reference to the renaming is a passing one in the histories of the No. 1 Canadian Radio Location Unit, which describes the unit being active for some time before being told their Mk. IIIC's "would be replaced during December". Поскольку Mk. III(C) was introduced operationally in 1943 and replaced by the SCR-584 in early 1945, this suggests the renaming took place in late 1944.[30]
- ^ Why they didn't rotate the elevation display so the blips appeared above and below instead of left and right is not mentioned. This is trivial to do and was common in other radars.
Рекомендации
Цитаты
- ^ Bedford 1946, п. 1115.
- ^ а б Austin 2001, п. 211.
- ^ Белый 2007, п. 125.
- ^ Bowen 1998, п. 143.
- ^ а б Ловелл 1991, п. 35.
- ^ Белый 2007, п. 130.
- ^ а б c d Ловелл 1991, п. 48.
- ^ а б c d е Wilcox 2014, п. 54.
- ^ а б c d Ловелл 1991, п. 49.
- ^ AP1093D 1946 г., Chapter 1, para 54.
- ^ а б Middleton 1981, п. 129.
- ^ а б c Dzuiban 1959, п. 285.
- ^ Zimmerman 1996, п. 202.
- ^ Middleton 1981, п. 130.
- ^ а б Avery 1998, п. 90.
- ^ Blackwell 1994, п. 86.
- ^ а б Wilcox 2014, п. 57.
- ^ а б c Mendes 2012, п. 9.
- ^ Middleton 1979, п. 42.
- ^ а б c Middleton 1979, п. 43.
- ^ а б c Middleton 1981, п. 44.
- ^ Middleton 1981, п. 45.
- ^ Middleton 1981, п. 81.
- ^ Dobinson 2001, п. 394.
- ^ Avery 1998, п. 91.
- ^ Blackwell 1994 С. 84–88.
- ^ а б c Wilcox 2014, п. 205.
- ^ а б Wilcox 2014, п. 55.
- ^ Бернс 2000, п. 398.
- ^ "No. 1 CRLU Radar History" (PDF). Canadian Army. п. 1.
- ^ Austin 2001, п. 268.
- ^ Routledge 1994, pp. 101–102, 259–61, 274.
- ^ Raghavan 2003, п. 3.
- ^ Даксфорд.
- ^ а б c d е ж грамм час Wilcox 2014, п. 206.
- ^ а б Wilcox 2014, п. 207.
- ^ Wilcox 2014, п. 208.
- ^ Wilcox 2014 С. 58-59.
- ^ AP1093D 1946 г., Глава 6, п.11.
- ^ AP1093D 1946 г., Глава 6, абзац 12.
- ^ AP1093D 1946 г., Глава 1, параграф 37.
Библиография
- "Radar Anti-Aircraft No. 3 MK. 7 – Blue Cedar (UK)". Duxford Radio Society.
- AP1093D: Обзор радара, часть II (PDF). Министерство авиации. 1946 г.
- Austin, Brian (2001). Schonland: Scientist and Soldier. CRC Press. ISBN 9781420033571.
- Avery, Donald (1998). The Science of War: Canadian Scientists and Allied Military Technology During the Second World War. Университет Торонто Пресс. ISBN 9780802059963.
- Bedford, Leslie (July 1946). "The development of gun-laying radar receivers type G.L. Mk.I, G.L. Mk.I* and G.L./E.F." Журнал Института инженеров-электриков. 93 (6): 1115–1122. Дои:10.1049/ji-3a-1.1946.0199.
- Blackwell, John (1994). Choco to A.I.F. Издательский дом GeneralStore. ISBN 9780919431836.
- Боуэн, Эдвард Джордж (1998). Radar Days. CRC Press. ISBN 978-0-7503-0586-0.
- Burns, Russel (2000). The Life and Times of A D Blumlein. ИЭПП. ISBN 9780852967737.
- Dobinson, Colin (2001). AA Command: Britain's Anti-aircraft Defences of World War II. Метуэн. ISBN 9780413765406.
- Dzuiban, Stanley (1959). Military Relations Between the United States and Canada, 1939–1945. Департамент армии.
- Ловелл, Бернард (1991). Эхо войны: история радара H2S. CRC Press. ISBN 9780852743171.
- Mendes, Brian (Fall 2012). "Последний выживший" (PDF). IEEE Canadian Review. 8–10 (6): 1115–1122.
- Middleton, William Edgar Knowles (1979). Physics at the National Research Council of Canada, 1929–1952. Уилфрид Лорье Пресс. ISBN 9780889200722.
- Middleton, William Edgar Knowles (1981). Radar Development in Canada: The Radio Branch of the National Research Council. Уилфрид Лорье Пресс. ISBN 9780889201064.
- Raghavan, S. (2003). Radar Meteorology. Springer.
- Routledge, N.W. (1994). История Королевского артиллерийского полка: зенитная артиллерия 1914–55. London: Royal Artillery Institution/Brassey's. ISBN 1-85753-099-3.
- Белый, Ян (2007). История радиолокатора воздушного перехвата (AI) и британского ночного истребителя 1935–1959 гг.. Ручка и меч. ISBN 978-1-84415-532-3.
- Wilcox, David (2014). Army Radar. Reveille Press.
- Zimmerman, David (1996). Top Secret Exchange: The Tizard Mission and the Scientific War. McGill-Queen's Press. ISBN 9780773565975.
внешняя ссылка
- The use of GL3 Radar in the Met Office by Bill Wallace, explains the use of No.3 Mk.2/4 as a weather instrument.
- The Restoration of a Radar, AA, No3 Mk2, two derelict Mk. 2's are being turned into one restored version.
- Radiolocation (Radar) Unit GL III(c) contains a number of wartime images of a Canadian unit training on the Mk. III.
- This letter provides a complete outline of a GL Mk. III-equipped AA site.