Кинематическая цепь - Википедия - Kinematic chain



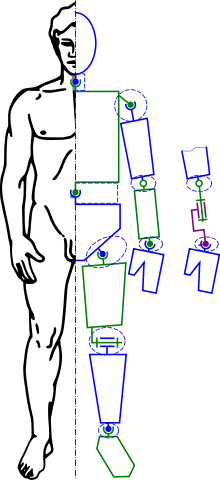
В машиностроении кинематическая цепь это собрание твердые тела связаны суставы обеспечить ограниченное (или желаемое) движение, которое является математическая модель для механическая система.[1] Как в привычном употреблении слова цепь, твердые тела или звенья ограничены своими соединениями с другими звеньями. Примером может служить простая открытая цепь, образованная последовательно соединенными звеньями, как и обычная цепь, которая является кинематический модель типичного робота манипулятор.[2]
Математические модели соединений или соединений между двумя звеньями называются кинематические пары. Кинематические пары моделируют шарнирные и скользящие соединения, лежащие в основе робототехника, часто называют нижние пары и контактные поверхности, важные для кулачки и передача, называется высшие пары. Эти суставы обычно моделируются как голономные ограничения. А кинематическая диаграмма схематическое изображение механической системы, показывающей кинематическую цепь.
Современное использование кинематических цепей включает податливость, возникающую в результате изгиба соединений в прецизионных механизмах, податливость звеньев в совместимые механизмы и микро-электромеханические системы, а также соответствие кабеля в кабельных роботах и тенсегрити системы.[3][4]
Формула мобильности
В степени свободы, или же мобильность, кинематической цепи - это количество параметров, определяющих конфигурацию цепи.[2][5]Система п твердые тела, движущиеся в пространстве, 6n степени свободы, измеренные относительно неподвижной рамы. Этот фрейм включается в подсчет тел, поэтому мобильность не зависит от связи, образующей фиксированный фрейм. Это означает, что степень свободы этой системы равна M = 6(N - 1), где N = п +1 - количество движущихся тел плюс неподвижное тело.
Соединения, соединяющие тела, накладывают ограничения. В частности, петли и ползунки накладывают пять ограничений и, следовательно, устраняют пять степеней свободы. Количество ограничений удобно определить c что сустав навязывает с точки зрения свободы сустава ж, куда c = 6 − ж. В случае шарнира или каретки, которые являются шарнирами с одной степенью свободы, имеют ж = 1 и, следовательно, c = 6 − 1 = 5.
В результате подвижность кинематической цепи, образованной п движущиеся ссылки и j соединяет каждый со свободой жя, я = 1, ..., j, дан кем-то

Напомним, что N включает фиксированную ссылку.
Анализ кинематических цепей
Уравнения связи кинематической цепи связывают диапазон перемещений, разрешенный в каждом сочленении, с размерами звеньев цепи и образуют алгебраические уравнения решаемые для определения конфигурации цепочки, связанной с конкретными значениями входных параметров, называемых степени свободы.
Уравнения связи для кинематической цепи получены с использованием жесткие преобразования [Z] для характеристики относительного перемещения, разрешенного в каждом соединении, и отдельные жесткие преобразования [X] для определения размеров каждого звена. В случае последовательной открытой цепи результатом является последовательность жестких преобразований, чередующихся преобразований суставов и звеньев от основания цепи к ее концевому звену, которое приравнивается к заданному положению концевого звена. Цепочка п последовательно соединенные звенья имеют кинематические уравнения,
![{ displaystyle [T] = [Z_ {1}] [X_ {1}] [Z_ {2}] [X_ {2}] cdots [X_ {n-1}] [Z_ {n}], ! }](https://wikimedia.org/api/rest_v1/media/math/render/svg/fc9b6ca53890471c968bd37375f4b48b38c97d51)
куда [Т] - это преобразование, определяющее положение конечного звена - обратите внимание, что цепочка включает в себя «нулевое» звено, состоящее из основного фрейма, к которому оно прикреплено. Эти уравнения называются передняя кинематика уравнения последовательной цепи.[6]
Кинематические цепи широкого диапазона сложности анализируются путем приравнивания кинематических уравнений последовательных цепей, образующих петли внутри кинематической цепи. Эти уравнения часто называют петлевые уравнения.
Сложность (с точки зрения расчета вперед и обратная кинематика ) цепи определяется следующими факторами:
- Его топология: последовательная цепочка, параллельный манипулятор, а дерево структура, или график.
- Его геометрический форма: как соседние суставы пространственно связаны друг с другом?
Объяснение
Два или более твердых тела в пространстве вместе называются системой твердых тел. Мы можем препятствовать движению этих независимых твердых тел кинематическими ограничениями. Кинематические ограничения - это ограничения между твердыми телами, которые приводят к уменьшению степеней свободы системы твердых тел.[5]
Синтез кинематических цепей
Уравнения связи кинематической цепи могут использоваться в обратном порядке для определения размеров звеньев из спецификации желаемого движения системы. Это называется кинематический синтез.[7]
Возможно, наиболее развитая формулировка кинематического синтеза предназначена для четырехзвенные рычаги, который известен как Теория бурместеров.[8][9][10]
Фердинанд Фройденштейн часто называют отцом современной кинематики за его вклад в кинематический синтез связи начиная с 1950-х гг. Его использование недавно разработанного компьютера для решения Уравнение Фрейденштейна стал прототипом системы автоматизированного проектирования системы.[7]
Эта работа была обобщена на синтез сферических и пространственных механизмов.[2]
Смотрите также
- Группа Ассур
- Параметры Денавита – Хартенберга
- Критерий Чебышева – Грюблера – Куцбаха.
- Пространство конфигурации
- Машина (механическая)
- Механизм (инженерия)
- Шестиконечная навеска
- Простые машины
- Шесть степеней свободы
- Принцип суперпозиции
Рекомендации
- ^ Рило, Ф., 1876 Кинематика машин, (пер. и аннотированный А. Б. Кеннеди), перепечатано Дувром, Нью-Йорк (1963)
- ^ а б c Дж. М. Маккарти и Г. С. Со, 2010 г., Геометрический дизайн связей, Спрингер, Нью-Йорк.
- ^ Ларри Л. Хауэлл, 2001, Совместимые механизмы, Джон Уайли и сыновья.
- ^ Александр Слокум, 1992 г., Прецизионная конструкция машины, МСБ
- ^ а б Дж. Дж. Уикер, Г. Р. Пеннок и Дж. Э. Шигли, 2003 г., Теория машин и механизмов, Издательство Оксфордского университета, Нью-Йорк.
- ^ Дж. М. Маккарти, 1990 г., Введение в теоретическую кинематику, MIT Press, Кембридж, Массачусетс.
- ^ а б Р. С. Хартенберг и Дж. Денавит, 1964 г., Кинематический синтез связей, Макгроу-Хилл, Нью-Йорк.
- ^ Сух, К. Х., и Рэдклифф, К. В., Кинематика и конструкция механизмов, Джон Вили и сыновья, Нью-Йорк, 1978.
- ^ Сандор, Г. Н., Эрдман, А. Г., 1984, AdvancedMechanismDesign: AnalysisandSynthesis, Vol. 2. Прентис-Холл, Энглвуд-Клиффс, Нью-Джерси.
- ^ Хант, К. Х., Кинематическая геометрия механизмов, Oxford Engineering Science Series, 1979 г.