Планирующий полет - Gliding flight
Планирующий полет тяжелее воздуха полет без использования толкать; период, термин волпланирование также относится к этому способу полета животных.[1] Он используется планирующие животные и самолетами, такими как планеры. Этот режим полета включает в себя полет на значительное расстояние по горизонтали по сравнению с его спуском, и поэтому его можно отличить от в основном прямого снижения вниз, как с круглым парашютом.
Хотя человеческое применение планирующего полета обычно относится к самолетам, предназначенным для этой цели, большинство самолетов с двигателями способны планировать без использования двигателя. Как и в случае с продолжительным полетом, планирование обычно требует применения профиль, такой как крылья на самолетах или птицах, или скользящая мембрана из скользящий опоссум. Однако скольжения можно добиться с помощью плоского (незащищенный ) крыло, как и у простого бумажный самолетик,[2] или даже с бросание карт. Однако некоторые самолеты с подъемные тела и животные, такие как летающая змея может достичь планирующего полета без крыльев, создав ровную поверхность под ними.
Самолет ("планеры")
Большинство крылатых самолетов могут до некоторой степени планировать, но есть несколько типов самолетов, предназначенных для планирования:
- Планер, также известный как планер
- Дельтаплан
- Параплан
- Скоростной планер
- Рам-воздушный парашют
- Роторный змей, если он не привязан, известен как роторный планер или гироглайдер.
- Военный планер
- Бумажный самолетик
- Радиоуправляемый планер
- Ракетный планер
- Вингсьют
Основное применение человеком в настоящее время является развлекательным, хотя во время Вторая мировая война военные планеры использовались для перевозки войск и техники в бой. Типы самолетов, которые используются для спорта и отдыха, классифицируются как планеры (планеры), дельтапланы и парапланы. Эти два последних типа часто запускаются с ног. Конструкция всех трех типов позволяет им многократно подниматься, используя восходящий поток воздуха, а затем скользить, прежде чем найти следующий источник подъемной силы. Когда это делается на планерах (планерах), этот вид спорта известен как скольжение а иногда как парящий. Для самолетов, запускаемых с ног, он известен как дельтапланеризм и парапланеризм. Радиоуправляемые планеры с неподвижными крыльями тоже взлетают энтузиасты.
В добавление к моторные планеры некоторые летательные аппараты с двигателем предназначены для обычного планирования во время части полета; обычно при посадке после периода полета с двигателем. К ним относятся:
- Экспериментальный самолет такой как Североамериканский X-15, которые скользили назад, использовав свое топливо
- Космический корабль такой как Шаттлы, SpaceShipOne и русский Буран
Некоторые летательные аппараты не предназначены для планирования, за исключением чрезвычайных ситуаций, таких как отказ двигателя или выработка топлива. Видеть список рейсов авиакомпании, на которых требовался планерный полет. Планирование на вертолете называется Автоматический поворот.
Планирующие животные
Птицы
Номер животные имеют отдельно развивались много раз скользит без единого предка. В частности, птицы используют планирующий полет, чтобы свести к минимуму потребление энергии. Большие птицы особенно хорошо умеют летать, в том числе:
Подобно прогулочным самолетам, птицы могут чередовать периоды полета с периодами полета в воздухе. поднимающийся воздух, и поэтому проводят значительное время в воздухе с минимальными затратами энергии. В большой фрегат в частности способен к непрерывным полетам до нескольких недель.[3]
Млекопитающие

Чтобы облегчить скольжение, некоторые млекопитающие развили структуру, называемую патагиум. Это перепончатая структура, растянутая между различными частями тела. Наиболее развито у летучих мышей. По тем же причинам, что и птицы, летучие мыши может эффективно скользить. У летучих мышей кожа образующая поверхность крыла - это продолжение кожи живота, которое идет до кончика каждого пальца, соединяя переднюю конечность с телом. Патагиум летучей мыши состоит из четырех отдельных частей:
- Пропатагий: патагий от шеи до первого пальца.
- Дактилопатагиум: часть, находящаяся в пределах пальцев
- Плагиопатагиум: участок между последним пальцем и задними конечностями.
- Уропатагиум: задняя часть тела между двумя задними конечностями
Другие млекопитающие, такие как скользящие опоссумы и белки-летяги также летают с использованием патагиума, но с гораздо меньшей эффективностью, чем летучие мыши. Они не могут набрать высоту. Животное запускается с дерева, раздвигая конечности, чтобы обнажить скользящие мембраны, обычно чтобы перебраться с дерева на дерево в тропические леса как эффективное средство как для поиска пищи, так и для уклонения от хищников. Эта форма древесное движение, распространено в тропических регионах, таких как Борнео и Австралия, где деревья высокие и широко расставленные.
У белок-летягов патагий тянется от передних до задних конечностей по длине каждой стороны туловища. в сахарный планер, патагия проходит от пятого пальца каждой руки до первого пальца каждой стопы. Это создает крыло позволяя им скользить на 50 метров и более.[4] Этот скользящий полет регулируется изменением кривизны мембраны или перемещением ног и хвоста.[5]
Рыбы, рептилии, амфибии и другие планирующие животные
Помимо млекопитающих и птиц, другие животные, особенно летучая рыба, летающие змеи, летающие лягушки и летающий кальмар также скользят.

Полет летучей рыбы обычно составляет около 50 метров (160 футов),[6] хотя они могут использовать восходящие потоки на переднем крае волн, чтобы преодолевать расстояния до 400 м (1300 футов).[6][7] Чтобы выскользнуть из воды, летучая рыба перемещает хвост до 70 раз в секунду.[8] Затем он распространяет грудные плавники и слегка наклоняет их вверх, чтобы обеспечить подъем.[9] В конце полета он складывает грудные плавники, чтобы снова войти в море, или опускает хвост в воду, чтобы оттолкнуться от воды, чтобы подняться для следующего полета, возможно, меняя направление.[8][9] Изогнутый профиль «крыла» сравним по аэродинамической форме с птичьим крылом.[10] Рыба способна увеличивать время пребывания в воздухе, летя прямо или под углом к направлению восходящие потоки созданный комбинацией воздуха и Океанские течения.[8][9]
Змеи из рода Chrysopelea также известны под общим названием «летающая змея». Перед тем как взлететь с ветки, змея делает J-образный изгиб. Оттолкнув свое тело от дерева, он втягивает его брюшко и раздувает ребра, превращая свое тело в «псевдовогнутое крыло»,[11] все время делая постоянный змеевик движение боковая волнистость[12] параллельно земле[13] чтобы стабилизировать его направление в воздухе и безопасно приземлиться.[14] Летающие змеи умеют скользить лучше, чем белки-летяги и другие планирующие животные Несмотря на отсутствие конечностей, крыльев или каких-либо других крыльевидных выступов, он скользит по лесу и джунглям на расстоянии до 100 м.[13][15] Их пункт назначения в основном предсказывается баллистика; однако они могут потренироваться в полете отношение управление "скольжением" в воздухе.[16]
Планерный полет эволюционировал независимо среди 3400 видов лягушек.[17] от обоих Новый мир (Hylidae ) и Старый мир (Ракофориды ) семьи.[18] Этот параллельная эволюция рассматривается как приспособление к их жизни на деревьях, высоко над землей. Характеристики Старый мир виды включают «увеличенные руки и ноги, полную перепонку между пальцами рук и ног, боковые кожные лоскуты на руках и ногах.
Силы

При планировании на летательные аппараты и животных действуют три основные силы:[19]
- вес - сила тяжести действует в направлении вниз
- лифт - действует перпендикулярно к вектор представляющий воздушную скорость
- сопротивление - действует параллельно вектору, представляющему воздушную скорость
Когда самолет или животное спускается, воздух, движущийся над крыльями, создает поднимать. Подъемная сила действует немного вперед по сравнению с вертикальной, потому что она создается под прямым углом к воздушному потоку, который исходит чуть ниже при спуске планера, см. угол атаки. Этой горизонтальной составляющей подъемной силы достаточно, чтобы преодолеть тащить и позволяет планеру ускоряться вперед. Даже если вес заставляет самолет снижаться, если воздух поднимается быстрее, чем скорость снижения, будет наблюдаться набор высоты.
Отношение подъемной силы к лобовому сопротивлению
Отношение подъемной силы к лобовому сопротивлению, или L / D соотношение, это количество поднимать созданный крыло или транспортное средство, разделенное на тащить он создает, перемещаясь по воздуху. Более высокое или более благоприятное отношение L / D обычно является одной из основных целей при проектировании самолетов; поскольку необходимая подъемная сила конкретного самолета определяется его весом, обеспечение этой подъемной силы с меньшим сопротивлением напрямую ведет к лучшей экономии топлива и характеристикам набора высоты.
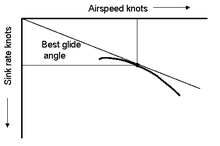
Эффект скорость полета по скорости спуска может быть изображена полярная кривая. Эти кривые показывают воздушную скорость, при которой можно достичь минимального снижения, и воздушную скорость с наилучшим соотношением L / D. Кривая представляет собой перевернутую U-образную форму. По мере уменьшения скорости подъемная сила быстро падает примерно до скорости сваливания. Пик буквы U соответствует минимальному сопротивлению.
Поскольку подъемная сила и сопротивление пропорциональны коэффициенту подъемной силы и сопротивления, соответственно, умноженным на один и тот же коэффициент (1/2 ρвоздуха v2S), отношение L / D можно упростить до коэффициента подъемной силы, деленного на коэффициент лобового сопротивления или Cl / Cd, и, поскольку оба они пропорциональны воздушной скорости, соотношение L / D или Cl / Cd обычно наносится на график. против угла атаки.
Тащить
Индуцированное сопротивление вызвано созданием подъемной силы крылом. Подъемная сила, создаваемая крылом, перпендикулярна относительному ветру, но поскольку крылья обычно летают с небольшой скоростью угол атаки, это означает, что составляющая силы направлена назад. Задний компонент этой силы (параллельный относительному ветру) рассматривается как сопротивление. На малых скоростях самолет должен создавать подъемную силу с большим углом атаки, что приводит к большему индуцированному сопротивлению. Этот член доминирует на низкоскоростной стороне графика сопротивления, левой стороне буквы U.
Перетаскивание профиля вызвано попаданием воздуха в крыло и другие части самолета. Эта форма сопротивления, также известная как сопротивление ветра, изменяется в зависимости от квадрата скорости (см. уравнение сопротивления ). По этой причине сопротивление профиля более выражено на более высоких скоростях, образуя правую часть U-образной формы графика сопротивления. Сопротивление профиля снижается в первую очередь за счет уменьшения поперечного сечения и обтекаемости.

Поскольку подъемная сила неуклонно увеличивается до критического угла, обычно это точка, в которой совокупное сопротивление является минимальным, и крыло или самолет демонстрируют наилучшие характеристики L / D.
Дизайнеры обычно выбирают такую конструкцию крыла, которая дает пик L / D на выбранном уровне. крейсерская скорость для самолета с двигателем с неподвижным крылом, что обеспечивает максимальную экономию. Как и все в авиационная техника, отношение подъемной силы к лобовому сопротивлению - не единственный фактор, который учитывается при проектировании крыла. Производительность на высоком уровне угол атаки и нежный ларек также важны.
Уменьшение лобового сопротивления представляет особый интерес при проектировании и эксплуатации высокопроизводительных устройств. планер (планер) с, самые большие из которых могут иметь коэффициент скольжения, приближающийся к 60: 1, хотя многие другие имеют более низкие характеристики; 25: 1 считается подходящим для тренировочного использования.
Коэффициент скольжения
При полете с постоянной скоростью в неподвижном воздухе планер движется на определенное расстояние вперед на определенное расстояние вниз. Отношение расстояния вперед к расстоянию вниз называется качество скольжения. Степень скольжения (E) численно равна подъемная сила и лобовое сопротивление в этих условиях; но не обязательно равняется во время других маневров, особенно если скорость не постоянна. Коэффициент глиссирования планера зависит от скорости полета, но часто указывается его максимальное значение. Качество скольжения обычно мало меняется в зависимости от загрузки автомобиля; более тяжелый автомобиль скользит быстрее, но почти сохраняет его качество.[20]

Коэффициент скольжения (или «тонкость») - это котангенс нисходящего угла угол скольжения (γ). В качестве альтернативы это также скорость движения вперед, деленная на скорость снижения (без двигателя):

Номер скольжения (ε) - величина, обратная коэффициенту скольжения, но иногда это сбивает с толку.
Примеры
| Статья о полете | Сценарий | L / D соотношение / качество скольжения |
|---|---|---|
| Эта (планер) | Скольжение | 70[21] |
| Большой фрегат | Парящий над океаном | 15-22 на типичных скоростях[22] |
| Дельтаплан | Скольжение | 15 |
| Рейс 143 авиакомпании Air Canada (Гимли Планер ) | а Боинг 767-200 со всеми двигателями вышли из строя по причине истощение топлива | ~12 |
| British Airways, рейс 9 | а Боинг 747-200Б со всеми двигателями вышли из строя по причине вулканический пепел | ~15 |
| Рейс 1549 US Airways | ан Airbus A320-214 со всеми двигателями вышли из строя по причине удар птицы | ~17 |
| Параплан | Модель с высокими характеристиками | 11 |
| Вертолет | Автоматический поворот | 4 |
| Парашют с приводом | Прямоугольный / эллиптический парашют | 3.6/5.6 |
| Космический шатл | Подход | 4.5[23] |
| Вингсьют | Скольжение | 3 |
| Автомобиль с гиперзвуковыми технологиями 2 | Оценка равновесного гиперзвукового планирования[24] | 2.6 |
| Северная летяга | Скольжение | 1.98 |
| Сахарный планер | Скольжение | 1.82[25] |
| Космический шатл | Гиперзвуковой | 1[23] |
| Аполлон СМ | Возвращение | 0.368[26] |
Важность качества планирования в планирующем полете
Хотя наилучшее качество планирования важно при измерении характеристик планирующего самолета, его качество планирования в диапазоне скоростей также определяет его успех (см. скольжение ).
Пилоты иногда летают с наилучшим L / D, точно контролируя воздушную скорость и плавно управляя средствами управления, чтобы уменьшить сопротивление. Однако сила вероятного следующего подъема, минимизация времени, проведенного в сильно опускающемся воздухе, и сила ветра также влияют на оптимальный скорость, чтобы летать. Пилоты летают быстрее, чтобы быстрее пройти через тонущий воздух, а при движении против ветра - оптимизировать угол планирования относительно земли. Чтобы достичь более высокой скорости по стране, планеры (планеры) часто наполнены водой балласт чтобы увеличить скорость полета и быстрее достичь следующей зоны подъема. Это мало влияет на угол планирования, поскольку увеличение скорости снижения и воздушной скорости остается пропорциональным, и, таким образом, более тяжелый самолет достигает оптимального L / D при более высокой воздушной скорости. Если в день подъемы сильные, преимущества балласта перевешивают более медленную скорость подъема.
Если воздух поднимается быстрее, чем скорость опускания, самолет будет набирать высоту. На более низких скоростях самолет может иметь худшее качество планирования, но также и меньшую скорость снижения. Низкая скорость также улучшает его способность круто поворачиваться в центре поднимающийся воздух где скорость подъема наибольшая. Скорость снижения примерно 1,0 м / с - это максимум, который может иметь практический дельтаплан или параплан, прежде чем он ограничит случаи, когда набор высоты возможен только при сильном подъеме воздуха. Планеры (планеры) имеют минимальную скорость снижения от 0,4 до 0,6 м / с в зависимости от учебный класс. Летательные аппараты, такие как авиалайнеры, могут иметь лучшую качество планирования, чем дельтаплан, но редко будут иметь возможность термообразования из-за их гораздо более высокой скорости движения и гораздо более высокой скорости снижения. (Обратите внимание, что Боинг 767 в Гимли Планер инцидент достигал качества скольжения всего 12: 1).
Потери высоты можно измерить на нескольких скоростях и нанести на график "полярная кривая «для расчета наилучшей скорости для полета в различных условиях, например, при полете против ветра или при опускании воздуха. Другие полярные кривые можно измерить после загрузки планера водяным балластом. По мере увеличения массы наилучшее качество планирования достигается при более высоких скоростей (Качество скольжения не увеличено).
Парящий
Парящие животные и самолеты могут чередовать планирование с периодами полета в воздухе. поднимающийся воздух. Используются пять основных типов подъемников:[27] термики, коньковый подъемник, подветренные волны, конвергенции и динамическое парение. Динамическое парение используется преимущественно птицами и некоторыми моделями самолетов, хотя в редких случаях оно также достигается пилотируемыми самолетами.[28]
Примеры парящего полета птиц:
- Термики и конвергенции по рапторы Такие как стервятники
- Ridge lift - пользователем чайки возле скал
- Подъем волн перелетными птицами[29]
- Динамические эффекты у поверхности моря альбатросы
Для человека парение - основа трех воздушный спорт: скольжение, дельтапланеризм и парапланеризм.
Смотрите также
- Дельтаплан с ножным пуском
- Соревнования по планеру
- Список рейсов авиакомпаний, на которых требовалось планирование
- Подводный планер
Рекомендации
- ^ самолет. Бесплатный словарь.
- ^ Блэкберн, Кен. "Аэродинамика бумажного самолета". Бумажные самолетики Кена Блэкберна. Архивировано из оригинал 1 октября 2012 г.. Получено 8 октября 2012.
Раздел 4.3
- ^ "Беспосадочный полет: как фрегат может парить в течение нескольких недель без остановки". Получено 2016-07-02.
- ^ Страхан, Австралийский музей (1983). Рональд (ред.). Полная книга австралийских млекопитающих: Национальный фотографический индекс дикой природы Австралии (1-е изд.). Сидней: Ангус и Робертсон. ISBN 0207144540.
- ^ "Интересные факты о сахарном планере". Drsfostersmith.com. Получено 22 июн 2010.
- ^ а б Росс Пайпер (2007), Необычные животные: энциклопедия любопытных и необычных животных, Гринвуд Пресс.
- ^ Летучая рыба, Exocoetidae Национальная география. Проверено 10 августа 2014.
- ^ а б c Кучера, У. (2005). «Управляемая хищниками макроэволюция летучих рыб, выведенная из поведенческих исследований: исторические споры и гипотеза» (PDF). Анналы истории и философии биологии. 10: 59–77. Архивировано из оригинал (PDF) на 2007-08-20.
- ^ а б c Рыба, Ф. Э. (1990). «Конструкция крыла и масштабирование летучей рыбы с учетом летных характеристик» (PDF). Журнал зоологии. 221 (3): 391–403. Дои:10.1111 / j.1469-7998.1990.tb04009.x. Архивировано из оригинал (PDF) 2013-10-20.
- ^ Fish, F. (1991). «О плавнике и молитве» (PDF). Ученые. 3 (1): 4–7. Архивировано из оригинал (PDF) на 2013-11-02.
- ^ Гарланд, Т, младший; Лосос, Дж. Б. (1994). «10. Экологическая морфология исполнения опорно-двигательного аппарата в чешуйчатый рептилий». Экологическая морфология: интегративная биология организма (PDF). Чикаго, Иллинойс: Издательство Чикагского университета. стр. 240–302. Получено 2009-07-14.
- ^ Джейн, Британская Колумбия (Декабрь 1986 г.). «Кинематика передвижения земной змеи» (PDF). Копея. 1986 (4): 915–927. Дои:10.2307/1445288. JSTOR 1445288. Архивировано из оригинал (PDF) 30 октября 2006 г.. Получено 2009-07-15.
- ^ а б Socha, J.J. (Август 2002 г.). «Кинематика - Планирующий полет в райской древесной змее» (PDF). Природа. 418 (6898): 603–604. Bibcode:2002Натура.418..603С. Дои:10.1038 / 418603a. PMID 12167849. S2CID 4424131. Получено 2009-07-14.[мертвая ссылка ]
- ^ Вэй, К. (май 2005 г.). "Внутри JEB - змеи бегут". Журнал экспериментальной биологии. 208 (10): i – ii. Дои:10.1242 / jeb.01644.
- ^ Ernst, C.H .; Цуг, Г. Р. (1996). Змеи в вопросе: Смитсоновская книга ответов. Пресса Смитсоновского института. стр.14–15.
- ^ «Исследователи раскрывают секреты полета змеи». 2005-05-12. Получено 2007-11-27.
- ^ Эмерсон, С.Б., и Кёль, М.А.Р. (1990). «Взаимодействие поведенческих и морфологических изменений в эволюции нового локомоторного типа:« Летающие »лягушки». Эволюция, 44(8), 1931-1946.
- ^ Эмерсон, С.Б., Трэвис, Дж., И Кёль, М.А.Р. (1990). «Функциональные комплексы и аддитивность в исполнении: тестовый пример с« летающими »лягушками». Эволюция, 44(8), 2153-2157.
- ^ НАСА: три силы на планере или планирующем животном
- ^ Руководство по полетам на планере, Публикация FAA 8083-13, стр. 3-2
- ^ Самолет Eta Графики летно-технических характеристик самолетов Eta - по состоянию на 11 апреля 2004 г.
- ^ Летно-технические характеристики самой крупной летучей птицы
- ^ а б Техническая конференция "Спейс шаттл" стр. 258
- ^ http://scienceandglobalsecurity.org/archive/2015/09/hypersonic_boost-glide_weapons.html
- ^ Джексон, Стивен М. (2000). «Угол скольжения у представителей рода Petaurus и обзор скольжения у млекопитающих». Обзор млекопитающих. 30 (1): 9–30. Дои:10.1046 / j.1365-2907.2000.00056.x. ISSN 1365-2907.
- ^ Хиллье, Эрнест Р., "Аэродинамика входа в условиях возвращения к Луне, полученная во время полета Аполлона 4 (AS-501)", NASA TN D-5399, (1969).
- ^ Уэлч, Джон (1999). Современное летное мастерство Ван Сикла. Город: McGraw-Hill Professional. С. 856–858. ISBN 0-07-069633-0.
Есть четыре основных типа подъемника, которые может использовать парящий пилот ...
- ^ Райхманн, Гельмут (2005). Streckensegelflug. Motorbuch Verlag. ISBN 3-613-02479-9.
- ^ [Отчет Нидерландского института экологии об использовании птицами подъемной силы волн]