Шаговый двигатель - Stepper motor

Кадр 1: Включается верхний электромагнит (1), притягивая ближайшие зубья зубчатого железного ротора. Если зубцы выровнены по отношению к электромагниту 1, они будут немного смещены относительно правого электромагнита (2).
Кадр 2: Верхний электромагнит (1) выключен, а правый электромагнит (2) находится под напряжением, подтягивая зубья к совмещению с ним. В этом примере это приводит к повороту на 3,6 °.
Кадр 3: Нижний электромагнит (3) находится под напряжением; происходит еще одно вращение на 3,6 °.
Кадр 4: На левый электромагнит (4) подается напряжение, и он снова поворачивается на 3,6 °. Когда верхний электромагнит (1) снова будет включен, ротор повернется на одно положение зуба; поскольку имеется 25 зубцов, в этом примере для полного вращения потребуется 100 шагов.
А шаговый двигатель, также известен как шаговый двигатель или шаговый двигатель, это бесщеточный электродвигатель постоянного тока который делит полный оборот на ряд равных шагов. Затем можно дать команду двигателю двигаться и удерживаться на одном из этих шагов без каких-либо датчик положения за Обратная связь (ан контроллер без обратной связи ), при условии, что двигатель точно подобран для применения с учетом крутящий момент и скорость.
Импульсные реактивные двигатели очень большие шаговые двигатели с уменьшенным числом полюсов и, как правило, с обратной связью. коммутируемый.
Основы работы

Щеточные двигатели постоянного тока вращаться непрерывно, когда Напряжение постоянного тока применяется к их клеммам. Шаговый двигатель известен своим свойством преобразовывать последовательность входных импульсов (обычно прямоугольных волн) в точно определенное приращение вращательного положения вала. Каждый импульс вращает вал на фиксированный угол.
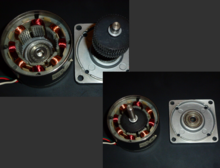
Шаговые двигатели, по сути, имеют несколько «зубчатых» электромагнитов, расположенных в виде статора вокруг центрального ротора, металлического зубчатого колеса. Электромагниты получают питание от внешнего схема драйвера или микроконтроллер. Чтобы вал двигателя вращался, сначала на один электромагнит подается мощность, которая магнитно притягивает зубья шестерни. Когда зубья шестерни совмещены с первым электромагнитом, они немного смещены относительно следующего электромагнита. Это означает, что когда следующий электромагнит включается, а первый выключается, шестерня слегка поворачивается, чтобы выровняться со следующей. Оттуда процесс повторяется. Каждый из этих вращений называется «шагом» с целое число шагов, совершающих полный оборот. Таким образом, двигатель можно повернуть на точный угол.
Круговое расположение электромагнитов разделено на группы, каждая группа называется фазой, и в каждой группе имеется равное количество электромагнитов. Количество групп выбирается конструктором шагового двигателя. Электромагниты каждой группы чередуются с электромагнитами других групп, чтобы сформировать однородный образец расположения. Например, если у шагового двигателя есть две группы, обозначенные как A или B, и всего десять электромагнитов, то шаблон группировки будет ABABABABAB.
Электромагниты в одной группе находятся под напряжением вместе. Из-за этого шаговые двигатели с большим количеством фаз обычно имеют больше проводов (или выводов) для управления двигателем.
Типы
Существует три основных типа шаговых двигателей:[1]
- Шаговый двигатель с постоянным магнитом
- Шаговый двигатель с переменным сопротивлением
- Гибридный синхронный шаговый двигатель
Двигатели с постоянными магнитами использовать постоянный магнит (PM) в роторе и работают на притяжении или отталкивании между PM ротора и статор электромагниты.
Импульсы перемещают ротор дискретными шагами, по часовой или против часовой стрелки. Если оставить включенным на последнем этапе, сильный фиксатор остается в этом месте вала. Этот фиксатор имеет предсказуемую жесткость пружины и заданный предел крутящего момента; проскальзывание происходит при превышении лимита. Если текущий удаляется, меньшее фиксатор все еще остается, поэтому удерживает положение вала против пружины или других влияний крутящего момента. После этого шаг может быть возобновлен при надежной синхронизации с управляющей электроникой.
Переменное сопротивление (VR) моторы имеют простой утюг ротор и работают по принципу минимального нежелание происходит с минимальным зазором, поэтому точки ротора притягиваются к статору полюса магнита. В то время как гибридные синхронные представляют собой комбинацию типов постоянного магнита и переменного магнитного сопротивления, чтобы максимизировать мощность при небольшом размере.[2]
Двигатели VR не имеют фиксаторов отключения питания.
Двухфазные шаговые двигатели
Есть две основные схемы намотки для электромагнитные катушки в двухфазном шаговом двигателе: биполярном и униполярном.
Униполярные двигатели

Униполярный шаговый двигатель имеет одну обмотку с центральный кран на фазу. Каждая секция обмоток включается для каждого направления магнитного поля. Поскольку в этом устройстве магнитный полюс можно перевернуть без переключения направления тока, коммутация схему можно сделать очень простой (например, один транзистор) для каждой обмотки. Обычно для данной фазы центральный ответвитель каждой обмотки делается общим: это дает три вывода на фазу и шесть выводов для типичного двухфазного двигателя. Часто эти две общие фазы соединены внутри, поэтому у двигателя всего пять выводов.
А микроконтроллер или контроллер шагового двигателя может использоваться для активации привода транзисторы в правильном порядке, и эта простота в эксплуатации делает униполярные двигатели популярными среди любителей; они, вероятно, являются самым дешевым способом получения точных угловых перемещений. Для экспериментатора обмотки могут быть идентифицированы путем соприкосновения клеммных проводов в двигателях с постоянными магнитами. Если выводы катушки соединены, вал поворачивать становится труднее. Один из способов отличить центральный отвод (общий провод) от провода на конце катушки - это измерить сопротивление. Сопротивление между общим проводом и проводом на конце катушки всегда равно половине сопротивления между проводами на конце катушки. Это связано с тем, что длина катушки между концами в два раза больше, а от центра (общий провод) до конца - только половина. Быстрый способ определить, работает ли шаговый двигатель, - это закоротить каждые две пары и попробовать провернуть вал. Всякий раз, когда сопротивление превышает нормальное, это означает, что цепь конкретной обмотки замкнута и фаза исправна.


Биполярные двигатели

Биполярные двигатели имеют по одной обмотке на фазу. Ток в обмотке необходимо реверсировать, чтобы перевернуть магнитный полюс, поэтому схема управления должна быть более сложной, обычно с H-мост компоновка (однако есть несколько готовых микросхем драйверов, чтобы упростить эту задачу). На каждую фазу приходится два вывода, ни один из них не является общим.
Типичная схема управления двухкатушечным биполярным шаговым двигателем будет: A + B + A− B−. Т.е. запустить катушку A с положительным током, затем снять ток с катушки A; затем запустить катушку B с положительным током, затем снять ток с катушки B; затем запустить катушку A с отрицательным током (переключение полярности путем переключения проводов, например, с помощью моста H), затем снять ток с катушки A; затем подайте катушку B отрицательным током (снова меняя полярность, как в катушке A); цикл завершается и начинается заново.
Эффекты статического трения при использовании H-образного моста наблюдались с некоторыми топологиями привода.[3]
Сглаживание шагового сигнала на более высокой частоте, на которую двигатель не может реагировать, уменьшит этот эффект «статического трения».

Поскольку обмотки используются лучше, они более мощные, чем униполярный двигатель того же веса. Это связано с физическим пространством, занимаемым обмотками. У униполярного двигателя вдвое больше проводов в одном и том же пространстве, но в любой момент времени используется только половина, следовательно, его КПД составляет 50% (или примерно 70% доступного крутящего момента). Хотя биполярным шаговым двигателем управлять сложнее, обилие микросхем драйверов означает, что этого добиться гораздо проще.
Шаговый двигатель с 8 выводами похож на униполярный шаговый двигатель, но выводы не имеют общего внутреннего соединения с двигателем. Этот двигатель может быть подключен в нескольких конфигурациях:
- Униполярный.
- Биполярный с последовательными обмотками. Это дает более высокую индуктивность, но меньший ток на обмотку.
- Биполярный с параллельными обмотками. Это требует более высокого тока, но может работать лучше, поскольку индуктивность обмотки уменьшается.
- Биполярный с одной обмоткой на фазу. Этот метод запустит двигатель только на половине имеющихся обмоток, что уменьшит доступный крутящий момент на низкой скорости, но потребует меньшего тока.
Шаговые двигатели с большим числом фаз
Многофазные шаговые двигатели с большим количеством фаз обычно имеют гораздо более низкий уровень вибрации.[4] Хотя они дороже, но имеют более высокую удельная мощность и с соответствующей приводной электроникой часто лучше подходят для применения[нужна цитата ].
Схемы драйверов
Производительность шагового двигателя сильно зависит от схема драйвера. Кривые крутящего момента может быть увеличена до более высоких скоростей, если полюса статора можно будет реверсировать быстрее, ограничивающим фактором является комбинация индуктивности обмотки. Чтобы преодолеть индуктивность и быстро переключить обмотки, необходимо увеличить напряжение привода. Это дополнительно ведет к необходимости ограничения тока, который в противном случае может вызвать такое высокое напряжение.
Дополнительным ограничением, часто сравнимым с влиянием индуктивности, является обратная ЭДС двигателя. Когда ротор двигателя вращается, генерируется синусоидальное напряжение, пропорциональное скорости (скорости шага). Это переменное напряжение вычитается из имеющейся формы волны напряжения, чтобы вызвать изменение тока.
Схемы драйверов L / R
Цепи драйвера L / R также упоминаются как постоянное напряжение приводы, потому что к каждой обмотке прикладывается постоянное положительное или отрицательное напряжение для задания положений шага. Однако именно ток обмотки, а не напряжение, передает крутящий момент на вал шагового двигателя. Ток I в каждой обмотке связан с приложенным напряжением V индуктивностью L и сопротивлением обмотки R. Сопротивление R определяет максимальный ток в соответствии с Закон Ома I = V / R. Индуктивность L определяет максимальную скорость изменения тока в обмотке по формуле для индуктор dI / dt = V / L. Результирующий ток для импульса напряжения представляет собой быстро увеличивающийся ток в зависимости от индуктивности. Это достигает значения V / R и сохраняется до конца импульса. Таким образом, при управлении от привода постоянного напряжения максимальная скорость шагового двигателя ограничена его индуктивностью, поскольку на некоторой скорости напряжение U будет изменяться быстрее, чем ток I. Проще говоря, скорость изменения тока равна L / R (например, для индуктивности 10 мГн с сопротивлением 2 Ом потребуется 5 мс для достижения примерно 2/3 максимального крутящего момента или примерно 24 мс для достижения 99% максимального крутящего момента). Для получения высокого крутящего момента на высоких скоростях требуется большое напряжение привода с низким сопротивлением и низкой индуктивностью.
С приводом L / R можно управлять резистивным двигателем низкого напряжения с приводом более высокого напряжения, просто добавляя внешний резистор последовательно с каждой обмоткой. Это приведет к потере мощности резисторов и выделению тепла. Поэтому это считается малоэффективным вариантом, хотя и простым и дешевым.
Современные драйверы режима напряжения преодолевают некоторые из этих ограничений, приближая синусоидальную форму волны напряжения к фазам двигателя. Амплитуда формы волны напряжения должна увеличиваться с увеличением скорости шага. При правильной настройке это компенсирует влияние индуктивности и обратной ЭДС, обеспечивая приличную производительность по сравнению с драйверами токового режима, но за счет конструктивных усилий (процедур настройки), которые проще для драйверов токового режима.
Цепи привода прерывателя
Цепи привода прерывателя называются приводами с регулируемым током, потому что они генерируют контролируемый ток в каждой обмотке, а не прикладывают постоянное напряжение. Цепи привода прерывателя чаще всего используются с двухобмоточными биполярными двигателями, при этом две обмотки приводятся в движение независимо для обеспечения определенного крутящего момента двигателя по часовой или против часовой стрелки. На каждую обмотку подается «питающее» напряжение в виде прямоугольной волны; пример 8 кГц .. Индуктивность обмотки сглаживает ток, который достигает уровня в соответствии с прямоугольной волной. рабочий цикл. Чаще всего на контроллер подаются биполярные (+ и -) напряжения питания относительно возврата обмотки. Таким образом, 50% рабочего цикла приводит к нулевому току. 0% приводит к полному U / R току в одном направлении. 100% приводит к полному току в обратном направлении. Этот уровень тока контролируется контроллером путем измерения напряжения на небольшом измерительном резисторе, включенном последовательно с обмоткой. Для этого требуется дополнительная электроника для определения токов обмоток и управления переключением, но это позволяет шаговым двигателям приводить в действие более высокий крутящий момент на более высоких скоростях, чем приводы L / R. Это также позволяет контроллеру выводить заранее определенные уровни тока, а не фиксированные. Встроенная электроника для этой цели широко доступна.
Формы сигналов фазного тока

Шаговый двигатель - многофазный Синхронный двигатель переменного тока (см. Теорию ниже), и в идеале он управляется синусоидальным током. Форма волны полного шага является грубым приближением к синусоиде и является причиной того, что двигатель демонстрирует такую сильную вибрацию. Для лучшего приближения синусоидальной формы волны возбуждения были разработаны различные методы возбуждения: это полушаговый и микрошаговый.
Волновой привод (одна фаза включена)
В этом методе привода одновременно активируется только одна фаза. У него такое же количество ступеней, что и у полношагового привода, но двигатель будет иметь значительно меньший крутящий момент, чем номинальный. Используется редко. Анимированный рисунок, показанный выше, представляет собой волновой приводной двигатель. На анимации у ротора 25 зубцов, и требуется 4 шага, чтобы повернуться на одно положение зуба. Таким образом, на полный оборот будет 25 × 4 = 100 шагов, и каждый шаг будет составлять 360/100 = 3,6 градуса.
Полный шаг (две фазы включены)
Это обычный метод для полного шага двигателя. Две фазы всегда включены, поэтому двигатель обеспечивает максимальный номинальный крутящий момент. Как только одна фаза отключается, включается другая. Волновой привод и однофазный полный шаг - это одно и то же, с одинаковым числом шагов, но с разницей в крутящем моменте.
Полушаг
В полушаговом режиме привод чередует две фазы и одну. Это увеличивает угловое разрешение. Двигатель также имеет меньший крутящий момент (около 70%) в положении полного шага (когда включена только одна фаза). Это может быть уменьшено путем увеличения тока в активной обмотке для компенсации. Преимущество полушагового режима состоит в том, что электроника привода не требует изменений, чтобы поддерживать его. На анимированном рисунке, показанном выше, если мы изменим его на полушаг, то для поворота на 1 положение зубца потребуется 8 шагов. Таким образом, на полный оборот будет 25 × 8 = 200 шагов, и каждый шаг будет составлять 360/200 = 1,8 °. Его угол на шаг составляет половину полного шага.
Микрошаг
То, что обычно называют микрошагом, часто бывает синус-косинусный микрошаг в котором ток в обмотке приближается к синусоидальной форме волны переменного тока. Обычный способ достижения синусо-косинусного тока - использование цепей управления прерывателем. Синусо-косинусный микрошаг является наиболее распространенной формой, но могут использоваться и другие формы сигналов.[5] Независимо от используемой формы сигнала, когда микрошаги становятся меньше, работа двигателя становится более плавной, что значительно снижает резонанс в любых частях, к которым двигатель может быть подключен, а также в самом двигателе. Разрешение будет ограничено механическим прикол, люфт, и другие источники ошибок между двигателем и конечным устройством. Редукторы могут использоваться для увеличения разрешения позиционирования.
Уменьшение размера шага - важная особенность шаговых двигателей и основная причина их использования при позиционировании.
Пример: многие современные гибридные шаговые двигатели рассчитаны таким образом, что ход каждого полного шага (например, 1,8 градуса на полный шаг или 200 полных шагов за оборот) будет в пределах 3% или 5% хода каждого второго полного шага, пока поскольку двигатель работает в заданных рабочих диапазонах. Некоторые производители показывают, что их двигатели могут легко поддерживать 3% или 5% равенство размера шага, поскольку размер шага уменьшается с полного шага до 1/10 шага. Затем, когда число делителя микрошага увеличивается, повторяемость размера шага ухудшается. При большом уменьшении размера шага можно выдать множество команд микрошага до того, как вообще произойдет какое-либо движение, и тогда движение может быть «прыжком» в новую позицию.[6] Некоторые ИС шагового контроллера используют увеличенный ток, чтобы минимизировать такие пропущенные шаги, особенно когда импульсы пикового тока в одной фазе в противном случае были бы очень короткими.
Теория
Шаговый двигатель можно рассматривать как синхронный двигатель переменного тока с увеличенным числом полюсов (как на роторе, так и на статоре), при этом следует учитывать, что у них нет общего знаменателя. Кроме того, магнитомягкий материал с множеством зубцов на роторе и статоре позволяет дешево увеличить количество полюсов (реактивный двигатель). Современные степперы имеют гибридную конструкцию, имеют как постоянные магниты, так и сердечники из мягкого железа.
Для достижения полного номинального крутящего момента катушки в шаговом двигателе должны достичь своего полного номинального значения. текущий на каждом шаге. Индуктивность обмотки и противо-ЭДС, создаваемые движущимся ротором, имеют тенденцию сопротивляться изменениям тока возбуждения, так что по мере увеличения скорости двигателя все меньше и меньше времени тратится на полный ток, что снижает крутящий момент двигателя. При дальнейшем увеличении скорости ток не достигнет номинального значения, и в конечном итоге двигатель перестанет создавать крутящий момент.
Момент втягивания
Это мера крутящего момента, создаваемого шаговым двигателем, когда он работает без состояния ускорения. На низких скоростях шаговый двигатель может синхронизироваться с приложенной частотой шага, и этот момент втягивания должен преодолевать трение и инерцию. Важно убедиться, что нагрузка на двигатель фрикционная, а не инерционная, поскольку трение снижает любые нежелательные колебания.
Кривая втягивания определяет область, называемую областью запуска / остановки. В этой области двигатель может быть запущен / остановлен мгновенно с приложенной нагрузкой и без потери синхронизма.
Вытягивающий момент
Вытягивающий момент шагового двигателя измеряется путем разгона двигателя до желаемой скорости и последующего увеличения крутящего момента до тех пор, пока двигатель не остановится или не пропустит шаги. Это измерение проводится в широком диапазоне скоростей, и результаты используются для генерации мощности шагового двигателя. кривая динамических характеристик. Как отмечено ниже, на эту кривую влияют напряжение возбуждения, ток возбуждения и методы переключения тока. Разработчик может включить коэффициент безопасности между номинальным крутящим моментом и расчетным крутящим моментом при полной нагрузке, необходимым для данного приложения.
Момент фиксации
Синхронные электродвигатели использование постоянных магнитов имеет резонансный момент удержания положения (называемый фиксирующий момент или зубцы, а иногда и включается в спецификации) без электрического привода. Магнитные сердечники из мягкого железа не проявляют такого поведения.
Звон и резонанс
Когда двигатель перемещается на один шаг, он выходит за пределы конечной точки покоя и колеблется вокруг этой точки, когда он останавливается. Этот нежелательный звон проявляется как вибрация ротора двигателя и более выражен в ненагруженных двигателях. Незагруженный или недогруженный двигатель может и часто будет останавливаться, если испытываемая вибрация достаточна для потери синхронизации.
Шаговые двигатели имеют собственная частота операции. Когда частота возбуждения соответствует этому резонансу, звон становится более выраженным, шаги могут быть пропущены, а остановка более вероятна. Резонансную частоту двигателя можно рассчитать по формуле:

- Mчас
- Удерживающий момент Н · м
- п
- Количество пар полюсов
- Jр
- Инерция ротора кг · м²
Величина нежелательного звонка зависит от обратная ЭДС в результате скорости ротора. Результирующий ток способствует демпфированию, поэтому важны характеристики схемы возбуждения. Звон ротора можно описать в терминах коэффициент демпфирования.
Рейтинги и характеристики
На паспортных табличках шаговых двигателей обычно указывается только ток обмотки, а иногда и напряжение и сопротивление обмотки. По рейтингу Напряжение будет производить номинальный ток обмотки при постоянном токе: но в большинстве случаев это бессмысленный рейтинг, поскольку все современные драйверы ограничивают ток, а напряжения привода значительно превышают номинальное напряжение двигателя.
В даташитах от производителя часто указывается индуктивность. Обратная ЭДС также важна, но редко указывается (ее легко измерить с помощью осциллографа). Эти цифры могут быть полезны для более детального проектирования электроники, отклонения от стандартных напряжений питания, адаптации электроники драйвера сторонних производителей или получения информации при выборе между моделями двигателей с аналогичными характеристиками размера, напряжения и крутящего момента.
Крутящий момент на низкой скорости шагового двигателя будет напрямую зависеть от тока. Скорость падения крутящего момента на более высоких скоростях зависит от индуктивности обмотки и схемы возбуждения, к которой она подключена, особенно от управляющего напряжения.
Степперы должны иметь размер в соответствии с опубликованными кривая крутящего момента, которое указывается производителем при определенных напряжениях привода или с использованием собственной схемы привода. Провалы на кривой крутящего момента указывают на возможные резонансы, влияние которых на применение следует понимать разработчикам.
Шаговые двигатели, адаптированные к суровым условиям окружающей среды, часто называют IP65 оценен.[7]
Национальная ассоциация производителей электрооборудования США (NEMA) стандартизирует различные аспекты шаговых двигателей. Обычно их называют NEMA DD, где DD - это диаметр лицевой панели в дюймах, умноженный на 10 (например, NEMA 17 имеет диаметр 1,7 дюйма). Существуют дополнительные спецификации для описания шаговых двигателей, и такие подробности можно найти в ICS 16-2001 стандарт (раздел 4.3.1.1). Есть также полезные резюме и дополнительная информация о Reprap сайт.
Приложения
Шаговые двигатели с компьютерным управлением являются одним из управления движением система позиционирования. Как правило, они управляются цифровым способом как часть открытый цикл система для использования в приложениях для удержания или позиционирования.
В области лазеры и оптика они часто используются в оборудовании для точного позиционирования, таком как линейные приводы, линейные ступени, ступени вращения, гониометры, и крепления для зеркал. Другое использование - в упаковочном оборудовании и позиционировании пилот клапана этапы для системы контроля жидкости.
В коммерческих целях шаговые двигатели используются в дисководы для гибких дисков, планшетные сканеры, компьютерные принтеры, заговорщики, игровые автоматы, сканеры изображений, компакт-диск диски, интеллектуальное освещение, объективы камеры, Станки с ЧПУ, и 3D принтеры.
Система шагового двигателя
Система шагового двигателя состоит из трех основных элементов, часто в сочетании с некоторым типом пользовательского интерфейса (главный компьютер, ПЛК или немой терминал):
- Индексаторы
- Индексатор (или контроллер) - это микропроцессор способен генерировать пошаговые импульсы и сигналы направления для драйвера. Кроме того, индексатор обычно требуется для выполнения многих других сложных командных функций.
- Драйверы
- Драйвер (или усилитель) преобразует командные сигналы индексатора в мощность, необходимую для питания обмоток двигателя. Существует множество типов драйверов с разным номинальным напряжением и током и конструкцией. Не все драйверы подходят для запуска всех двигателей, поэтому при разработке системы управления движением процесс выбора драйвера имеет решающее значение.
- Шаговые двигатели
- Шаговый двигатель - это электромагнитное устройство, преобразующее цифровые импульсы в механическое вращение вала. Преимуществами шаговых двигателей являются низкая стоимость, высокая надежность, высокий крутящий момент на низких скоростях и простая прочная конструкция, которая работает практически в любых условиях. Основными недостатками использования шагового двигателя являются резонансный эффект, который часто проявляется на низких скоростях, и уменьшение крутящего момента с увеличением скорости.[8]
Преимущества
- Достигнута низкая стоимость контроля
- Высокий крутящий момент при запуске и низких скоростях
- Прочность
- Простота конструкции
- Может работать в системе управления без обратной связи
- Низкие расходы
- Меньше шансов заглохнуть или поскользнуться
- Работает в любых условиях
- Может широко использоваться в робототехнике.
- Высокая надежность
- Угол поворота двигателя пропорционален входному импульсу.
- Двигатель имеет полный крутящий момент в состоянии покоя (если обмотки находятся под напряжением)
- Точное позиционирование и повторяемость движения, так как хорошие шаговые двигатели имеют точность 3–5% шага, и эта ошибка не суммируется от одного шага к другому.
- Отличная реакция на пуск / остановку / движение задним ходом.
- Очень надежен, так как в моторе нет контактных щеток. Следовательно, срок службы двигателя просто зависит от срока службы подшипника.
- Реакция двигателей на цифровые входные импульсы обеспечивает управление без обратной связи, что упрощает управление двигателем и снижает его стоимость.
- Можно достичь очень низкоскоростного синхронного вращения с нагрузкой, непосредственно связанной с валом.
- Может быть реализован широкий диапазон скоростей вращения, поскольку скорость пропорциональна частоте входных импульсов.
Смотрите также
использованная литература
- ^ Липтак, Бела Г. (2005). Справочник инженеров по КИП: управление процессами и оптимизация. CRC Press. п. 2464. ISBN 978-0-8493-1081-2.
- ^ Тарун, Агарвал. «Шаговый двигатель - типы, преимущества и применение».
- ^ См. «Трение и мертвая зона» Дугласа Джонса. https://homepage.divms.uiowa.edu/~jones/step/physics.html#friction
- ^ "electricmotors.machinedesign.com".
- ^ zaber.com, микрошаг
- ^ «Микрошаг: мифы и реалии - МИКРОМО». www.micromo.com.
- ^ Подробнее о том, что такое шаговый двигатель IP65: http://www.applied-motion.com/videos/intro-amps-ip65-rated-motors-motordrives
- ^ «Advanced Micro Systems - Stepper 101». www.stepcontrol.com.
внешняя ссылка
- Анимация шагового двигателя
- Управление шаговым двигателем без микроконтроллера
- Учебное пособие по Zaber Microstepping. Проверено 15 ноября 2007.
- Обзор шаговой системы. Проверено 1 марта 2012 г.
- Анимация шагового двигателя от Nanotec.
- Управление шаговыми двигателями - Учебное пособие – Дуглас В. Джонс, Университет Айовы
- Шаг 101
- Двигатель NEMA, RepRapWiki
- Направляющая привода шагового двигателя от Dover Motion
- Шаговые двигатели IP65
- Шаговые двигатели IP68
- Взрывобезопасный двигатель