Векторное управление (мотор) - Википедия - Vector control (motor)
Векторное управление, также называемый полевой контроль (FOC), является частотно-регулируемый привод (VFD) метод управления, в котором статор токи трехфазный Электродвигатель переменного тока идентифицируются как два ортогональных компонента, которые можно визуализировать с помощью вектора. Один компонент определяет магнитный поток двигателя, другой - крутящий момент. Система управления привода вычисляет соответствующие задания компонентов тока на основе заданий магнитного потока и крутящего момента, заданных системой управления скоростью привода. Обычно пропорционально-интегральные (ПИ) регуляторы используются для сохранения эталонных значений измеренных компонентов тока. В широтно-импульсная модуляция частотно-регулируемого привода определяет транзистор переключение в соответствии с заданными значениями напряжения статора, которые являются выходом ПИ-регуляторов тока.[1]
ВОК используется для управления AC синхронный и асинхронные двигатели.[2] Первоначально он был разработан для применения в двигателях с высокими рабочими характеристиками, которые должны обеспечивать бесперебойную работу на всем протяжении скорость диапазон, генерировать полный крутящий момент на нулевой скорости и обладают высокими динамическими характеристиками, в том числе быстрыми ускорение и замедление. Тем не менее, он становится все более привлекательным для приложений с более низкой производительностью, а также из-за размера двигателя FOC, стоимости и потребляемая мощность уменьшение превосходства.[3][4] Ожидается, что с увеличением вычислительной мощности микропроцессоров он в конечном итоге почти повсеместно вытеснит одну переменную скаляр вольт -пер-Герц (V / f) контроль.[5][6]
История развития

К. Хассе из Дармштадского технического университета и Ф. Блашке из Сименса вектор управление двигателями переменного тока, начиная с 1968 г. и в начале 1970-х гг. Хассе с точки зрения предложения косвенной борьбы с переносчиками, Блашке с точки зрения предложения прямой борьбы с переносчиками.[7][8] Вернер Леонхард из Технического университета Брауншвейга продолжил разработку методов FOC и сыграл важную роль в открытии возможностей для Приводы переменного тока быть конкурентоспособной альтернативой Приводы постоянного тока.[9][10]
Однако только после того, как коммерциализация микропроцессоры, то есть в начале 1980-х годов стали доступны приводы переменного тока общего назначения.[11][12] Препятствия на пути использования ВОП для приводов переменного тока включали более высокую стоимость и сложность, а также более низкую ремонтопригодность по сравнению с приводами постоянного тока, поскольку до того момента для ВОП требовалось множество электронных компонентов в виде датчиков, усилителей и т.[13]
В Преобразование парка давно широко используется при анализе и изучении синхронный и индукционные машины. Преобразование, безусловно, является единственной наиболее важной концепцией, необходимой для понимания того, как работает FOC; эта концепция была впервые концептуализирована в статье 1929 года, автором которой является Роберт Х. Парк.[14] Статья Пака заняла второе место по значимости среди всех работ по энергетике, когда-либо опубликованных в двадцатом веке. Новизна работы Парка заключается в его способности трансформировать линейную дифференциальное уравнение устанавливается от одного с изменяющимися во времени коэффициентами до другого со временем инвариантный коэффициенты.[15]
Технический обзор
Обзор основных конкурирующих платформ управления VFD:
| ЧРП, с датчиком или без датчика |
| |||||||||||||||||||||||||||
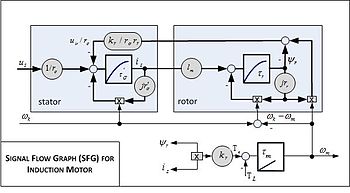



Хотя анализ элементов управления приводом переменного тока может быть технически весьма сложным (см. Также раздел), такой анализ неизменно начинается с моделирования цепи приводного двигателя в соответствии с прилагаемыми график потока сигналов и уравнения.[19]
При векторном управлении асинхронный или синхронный двигатель переменного тока управляется во всех рабочих условиях, как отдельный в восторге Двигатель постоянного тока.[21] То есть двигатель переменного тока ведет себя как двигатель постоянного тока, в котором магнитная связь поля и арматура потокосцепление, создаваемое соответствующими токами поля и якоря (или составляющей крутящего момента), ортогонально выровнены таким образом, что при управлении крутящим моментом магнитная связь поля не затрагивается, что обеспечивает динамический отклик крутящего момента.
Соответственно, векторное управление создает трехфазную ШИМ выходное напряжение двигателя, полученное из сложный вектор напряжения для управления комплексным вектором тока, полученным от входного трехфазного тока статора двигателя через прогнозы или вращения назад и вперед между трехфазной системой, зависящей от скорости и времени, и вращающейся системой отсчета этих векторов.координировать инвариантная во времени система.[22]
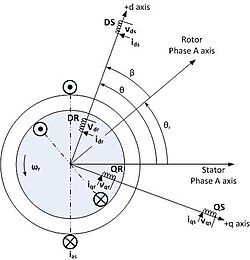
Такой сложный статор вектор текущего пространства может быть определен в системе координат (d, q) с ортогональными компонентами вдоль осей d (прямая) и q (квадратурная), так что компонент магнитной связи поля тока выровнен вдоль оси d, а компонент крутящего момента тока выровнен по оси q.[21] Система координат асинхронного двигателя (d, q) может быть наложена на мгновенную (a, b, c) трехфазную систему двигателя. синусоидальный систему, как показано на сопроводительном изображении (фазы b и c не показаны для ясности). Компоненты вектора тока системы (d, q) допускают обычное управление, такое как пропорциональное и интегральное, или PI, контроль, как с двигателем постоянного тока.
Проекции, связанные с системой координат (d, q), обычно включают:[19][22][23]
- Прямая проекция от мгновенных токов на (а, б, в) комплексный статор текущее пространственное векторное представление трехфазного синусоидальный система.
- Вперед три-в-две фазы, (a, b, c) -to- (,) проекции с использованием Кларк трансформация. Реализации векторного управления обычно предполагают наличие незаземленного двигателя со сбалансированными трехфазными токами, так что необходимо измерять только две фазы тока двигателя. Кроме того, обратная фаза с двух на три, (,) -to- (a, b, c) проекция использует пространственно-векторный ШИМ-модулятор или обратное преобразование Кларка и один из других ШИМ-модуляторов.
- Прямая и обратная двухфазная, (,) -к (d, q) и (d, q) -to- (,) проекции с использованием преобразования Парка и обратного преобразования Парка соответственно.


Однако источники нередко используют проекции типа «три к двум», (a, b, c) -to (d, q) и обратные проекции.
Хотя вращение системы координат (d, q) может быть произвольно установлено на любую скорость, существует три предпочтительных скорости или системы отсчета:[16]
- Стационарная система отсчета, в которой система координат (d, q) не вращается;
- Синхронно вращающаяся система отсчета, в которой система координат (d, q) вращается с синхронной скоростью;
- Система отсчета ротора, в которой система координат (d, q) вращается со скоростью ротора.
Развязанный Таким образом, крутящий момент и ток возбуждения могут быть получены из исходных токов статора для разработки алгоритма управления.[24]
В то время как компоненты магнитного поля и крутящего момента в двигателях постоянного тока могут управляться относительно просто за счет отдельного управления соответствующими токами поля и якоря, экономичное управление двигателями переменного тока в приложениях с регулируемой скоростью потребовало разработки микропроцессорных средств управления.[24] все приводы переменного тока теперь используют мощный DSP (цифровая обработка сигналов ) технологии.[25]
Инверторы могут быть реализованы как открытый цикл FOC без датчиков или с обратной связью, ключевым ограничением работы с обратной связью является минимальная скорость, возможная при 100% крутящем моменте, а именно около 0,8 Гц по сравнению с остановкой для работы с обратной связью.[9]
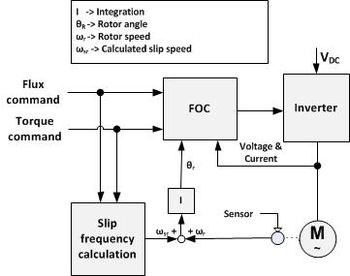
Существует два метода векторного контроля: прямой и Обратная связь борьба с переносчиками болезней (DFOC) и косвенная или прямая связь векторное управление (IFOC), IFOC используется чаще, потому что в режиме замкнутого контура такие приводы более легко работают во всем диапазоне скоростей от нулевой скорости до высокоскоростного с ослаблением поля.[26] В DFOC сигналы обратной связи по величине магнитного потока и углу вычисляются напрямую с использованием так называемых моделей напряжения или тока. В IFOC сигналы прямой связи угла пространства магнитного потока и величины магнитного потока сначала измеряют токи статора и ротор скорости для получения потока, то угол пространства собственно путем суммирования угла ротора, соответствующей скорости вращения ротора и расчетное опорное значение поскользнуться угол, соответствующий частоте скольжения.[27][28]
Бессенсорное управление приводами переменного тока (см. Блок-схему FOC без датчика) привлекательно с точки зрения стоимости и надежности. Бездатчиковое управление требует получения информации о скорости вращения ротора из измеренных напряжений и токов статора в сочетании с оценочными устройствами без обратной связи или наблюдателями с обратной связью.[19][20]
Заявление
1. Фазные токи статора измеряются, преобразуются в комплексный пространственный вектор в системе координат (a, b, c).
2. Ток преобразуется в (, ) система координат. Преобразовано в систему координат вращающийся в ротор система отсчета, положение ротора определяется интеграция скорость с помощью измерение скорости датчик.
3. Ротор потокосцепление вектор оценивается путем умножения вектора тока статора на индуктивность намагничивания Lм и фильтрация нижних частот результат с ротором без нагрузки постоянная времени Lр/Рр, а именно отношение индуктивности ротора к сопротивлению ротора.
4. Текущий вектор конвертируется в систему координат (d, q).
5. Компонент оси d вектора тока статора используется для управления потокосцеплением ротора, а мнимая компонента оси q используется для управления крутящим моментом двигателя. Хотя контроллеры PI могут использоваться для управления этими токами, ПИФ-паф Тип управления током обеспечивает лучшую динамическую производительность.
6. ПИ-регуляторы обеспечивают (d, q) компоненты напряжения координат. К выходному сигналу контроллера иногда добавляют элемент развязки, чтобы улучшить характеристики управления, чтобы уменьшить перекрестную связь или большие и быстрые изменения скорости, тока и магнитной связи. ПИ-регулятор тоже иногда нужен фильтрация нижних частот на входе или выходе, чтобы предотвратить чрезмерное усиление пульсаций тока из-за переключения транзисторов и дестабилизацию управления. Однако такая фильтрация также ограничивает производительность системы динамического управления. Высокая частота переключения (обычно более 10 кГц) обычно требуется для минимизации требований к фильтрации для высокопроизводительных приводов, таких как сервоприводы.
7. Компоненты напряжения преобразуются из системы координат (d, q) в (, ) система координат.
8. Составляющие напряжения преобразуются из (, ) систему координат в (a, b, c) систему координат или введенную в Широтно-импульсная модуляция (ШИМ) модулятор, или оба, для передачи сигналов в секцию инвертора мощности.
Важные аспекты применения борьбы с переносчиками болезней:
- Требуется измерение скорости или местоположения или какая-то оценка.
- Крутящий момент и поток можно изменить достаточно быстро, менее чем за 5-10 миллисекунд, путем изменения заданий.
- В пошаговая реакция есть некоторые превышение если используется ПИ-регулирование.
- Частота переключения транзисторов обычно постоянная и устанавливается модулятором.
- Точность крутящего момента зависит от точности параметров двигателя, используемых в управлении. Таким образом, часто встречаются большие ошибки из-за, например, изменений температуры ротора.
- Требуется разумная производительность процессора; обычно алгоритм управления вычисляется каждый цикл ШИМ.
Хотя алгоритм векторного управления сложнее, чем Прямое управление крутящим моментом (DTC) алгоритм не нужно рассчитывать так часто, как алгоритм DTC. Также датчики тока не обязательно должны быть лучшими на рынке. Таким образом, стоимость процессора и другого управляющего оборудования ниже, что делает его подходящим для приложений, где не требуется максимальная производительность DTC.
Смотрите также
- преобразовать
- Адаптивное управление
- Техника управления
- Теория управления
- Преобразование dqo
- Собственные значения и собственные векторы
- Расширенный фильтр Калмана
- Фильтр (обработка сигнала)
- Частотный отклик
- Преобразование Гильберта
- Импульсивный ответ
- Фильтр Калмана
- Надежный контроль
- Корневой локус
- Теория возмущений
- График потока сигналов
- Модель слабого сигнала
- Управление скользящим режимом
- Государственный наблюдатель
- Представление в пространстве состояний
- Симметричные компоненты
- Системный анализ
- Переходный ответ
- Функция передачи

Рекомендации
- ^ Замбада, Хорхе (8 ноября 2007 г.). «Полевое управление двигателями». MachineDesign.com. Архивировано из оригинал 16 февраля 2013 г.
- ^ Левин, Чак (10 апреля 2006 г.). «Новые разработки в технологиях коммутации и управления двигателем». DesignNews.com. Архивировано из оригинал 21 июня 2007 г.. Получено 22 апреля, 2012.
- ^ а б 568000 DSP Manual (2007). «Трехфазный индукционный привод переменного тока с векторным управлением с одним шунтирующим датчиком тока» (PDF). Freescale. п. 25, в т.ч. особенно экв. 2–37. Получено 16 мая, 2012.
- ^ Годболе, Кедар (23 сентября 2006 г.). «Управление, ориентированное на поле, снижает размер двигателя, стоимость и потребление энергии в промышленных приложениях». Инструменты Техаса.
- ^ Бозе, Бимал К. (июнь 2009 г.). «Прошлое, настоящее и будущее силовой электроники». Журнал IEEE Industrial Electronics Magazine. 3 (2): 11. Дои:10.1109 / MIE.2009.932709.
- ^ Мюррей, Энгус (27 сентября 2007 г.). «Преобразование движения: управление двигателями переменного тока с ориентацией на поле». EDN. Получено 9 мая 2017.
- ^ Яно, Масао; и другие. «История силовой электроники для двигателей в Японии» (PDF). п. 6, Рис 13. Получено 18 апреля 2012.
- ^ Рафик, Мд Абдур (2006). «Быстродействующее управление ориентацией поля привода асинхронного двигателя с адаптивным нейронным интегратором». Журнал по электротехнике и электронике Стамбульского университета. 6 (2): 229.
- ^ а б c Друри, Билл (2009). Справочник по методам управления приводами и средствами управления (2-е изд.). Стивенидж, Хертс, Великобритания: Институт инженерии и технологий. п. ххх. ISBN 978-1-84919-101-2.
- ^ Бозе, Бимал К. (2006). Силовая электроника и моторные приводы: достижения и тенденции. Амстердам: Академ. п. 22. ISBN 978-0-12-088405-6.
- ^ «Развитие векторного управления приводом».
- ^ Бозе (2006), стр. 605
- ^ Габриэль, Р .; Leonhard, W .; Нордби, Си-Джей (март – апрель 1980 г.). "Ориентированное на поле управление стандартными двигателями переменного тока с помощью микропроцессоров". Пер. По отраслевым приложениям. ИА-16 (2): 188. Дои:10.1109 / tia.1980.4503770. S2CID 14562471.
- ^ Парк, Роберт (1929). «Теория двух реакций синхронных машин». Пер. AIEE. 48: 716–730. Дои:10.1109 / t-aiee.1929.5055275. S2CID 51643456.
- ^ Heydt, G.T .; Venkata, S. S .; Балиджепалли, Н. (23–24 октября 2000 г.). "Высококачественные документы в энергетике 1900-1999 гг." (PDF). Североамериканский энергетический симпозиум (NAPS) 2000 г.: С-1 до С-7. Получено 23 мая, 2012.
- ^ а б Lee, R.J .; Pillay, P .; Харли Р. Г. (1984). «Справочные кадры D, Q для моделирования асинхронных двигателей» (PDF). Исследование электроэнергетических систем. EPR. 8: 15–26. Дои:10.1016/0378-7796(84)90030-0.
- ^ Росс, Дэйв; и другие. (2004). «Использование dsPIC30F для векторного управления ACIM» (PDF). Микрочип. Получено 16 мая, 2012.
- ^ Попеску, Мирча (2000). Моделирование асинхронных двигателей для целей векторного управления (PDF). Эспоо: Технологический университет Хельсинки. С. 13–14. ISBN 951-22-5219-8.
- ^ а б c d Хольц, Дж. (Август 2002 г.). «Бездатчиковое управление приводами асинхронных двигателей» (PDF). Труды IEEE. 90 (8): 1359–1394. Дои:10.1109 / jproc.2002.800726. Получено 3 июня, 2012.
- ^ а б Замбада, Хорхе. «Преимущества бессенсорного управления двигателем FOC». Журнал Appliance. Получено 3 июня, 2012.
- ^ а б Бозе (2006), стр. 429
- ^ а б Т.И. (1997). "Полевое управление трехфазными двигателями переменного тока" (PDF). TI.
- ^ Дидье, Жан-Луи. "Transformation des systèmes triphasés Fortescue, Clarke, Park et Ku". Архивировано из оригинал 7 апреля 2014 г.. Получено 4 июня, 2012.
- ^ а б Синха, Нареш Кумар (1986). Системы управления на базе микропроцессоров. Д. Рейдел Паблишинг. С. 161 и 175. ISBN 90-277-2287-0.
- ^ Бозе (2006), стр. 474
- ^ Bose (2006), стр. 419, 474
- ^ Бозе (2006), стр. 423-425
- ^ Донг, Ган (декабрь 2007 г.). «Бездатчиковое и оптимизированное по эффективности управление индукционной машиной с соответствующими схемами модуляции ШИМ преобразователя» (PDF). Технологический университет Теннесси. п. 10. Получено 16 мая, 2012.