Индукционный двигатель - Induction motor


An Индукционный двигатель или же асинхронный двигатель является Электродвигатель переменного тока в которой электрический ток в ротор необходимый для создания крутящего момента получается электромагнитная индукция от магнитное поле из статор обмотка.[1] Следовательно, асинхронный двигатель может быть изготовлен без электрических соединений с ротором.[а] Ротор асинхронного двигателя может быть либо тип раны или же беличьего типа.
Трехфазный Беличья клетка Асинхронные двигатели широко используются в качестве промышленных приводов, поскольку они самозапускаются, надежны и экономичны. Однофазные асинхронные двигатели широко используются для небольших нагрузок, таких как бытовые приборы, такие как вентиляторы. Хотя асинхронные двигатели традиционно используются для работы с фиксированной скоростью, они все чаще используются с частотно-регулируемые приводы (VFD) в режиме переменной скорости. ЧРП предлагают особенно важные возможности экономии энергии для существующих и будущих асинхронных двигателей с регулируемым крутящим моментом. центробежный применения с вентиляторами, насосами и компрессорами. Асинхронные двигатели с короткозамкнутым ротором очень широко используются как в приводах с фиксированной скоростью, так и в приводах с регулируемой частотой.
История


В 1824 г. французский физик Франсуа Араго сформулировал существование вращающиеся магнитные поля, названный Повороты Араго. Включая и выключая переключатели вручную, Уолтер Бейли продемонстрировал это в 1879 году, фактически создав первый примитивный асинхронный двигатель.[2][3][4][5][6][7][8]
Первый коммутатор -бесплатный однофазный асинхронный двигатель переменного тока был изобретен Венгерский инженер Отто Блати; он использовал однофазный двигатель, чтобы продвигать свое изобретение, электрический счетчик.[9][10]
Первые трехфазные асинхронные двигатели переменного тока без коммутатора были независимо изобретены Галилео Феррарис и Никола Тесла, работающая модель двигателя была продемонстрирована первым в 1885 году, а вторым в 1887 году. Тесла подал заявку на Патенты США в октябре и ноябре 1887 г. и получил некоторые из этих патентов в мае 1888 г. В апреле 1888 г. Королевская академия наук Турина опубликовал исследование Феррариса о его многофазном двигателе переменного тока, в котором подробно описаны основы работы двигателя.[5][11] В мае 1888 года Тесла представил технический доклад Новая система для двигателей и трансформаторов переменного тока к Американский институт инженеров-электриков (AIEE)[12][13][14][15][16] описание трех типов четырехполюсных двигателей: один с четырехполюсным ротором, образующим несамозапускающийся реактивный двигатель, другой с заведенным ротором, образующим самозапускающийся асинхронный двигатель, а третий - истинным синхронный двигатель с отдельно возбужденным постоянным током на обмотку ротора.
Джордж Вестингауз, который разрабатывал мощность переменного тока Система в то время лицензировала патенты Tesla в 1888 году и приобрела опцион на патент США на концепцию асинхронного двигателя Ferraris.[17] Тесла также работал в течение одного года в качестве консультанта. Сотрудник Westinghouse К. Ф. Скотт был назначен помогать Tesla, а позже занялся разработкой асинхронного двигателя в Westinghouse.[12][18][19][20] Настойчивый в продвижении трехэтапного развития, Михаил Доливо-Добровольский изобрел асинхронный двигатель с клеточным ротором в 1889 году и трехлепестковый трансформатор в 1890 году.[21][22] Кроме того, он утверждал, что двигатель Теслы был непрактичным из-за двухфазных пульсаций, которые побудили его продолжать свою трехфазную работу.[23] Хотя Westinghouse выпустила свой первый асинхронный двигатель в 1892 году и разработала линейку многофазных двигателей 60 герц асинхронные двигатели в 1893 году, эти ранние двигатели Westinghouse были двухфазные двигатели с намотанными роторами до Б. Г. Ламме разработан вращающийся стержень намотки ротора.[12]
В Компания General Electric (GE) начала разработку трехфазных асинхронных двигателей в 1891 году.[12] К 1896 году General Electric и Westinghouse подписали соглашение о перекрестном лицензировании конструкции стержневой обмотки и ротора, позже названной ротором с короткозамкнутым ротором.[12] Артур Э. Кеннелли был первым, кто полностью раскрыл значение сложные числа (с помощью j для представления квадратного корня из минус единицы) для обозначения 90º вращение оператор при анализе проблем переменного тока.[24] GE Чарльз Протеус Штайнмец сильно развитое приложение сложных величин переменного тока, включая модель анализа, теперь широко известную как асинхронный двигатель Эквивалентная схема Штейнмеца.[12][25][26][27]
Усовершенствования асинхронных двигателей, проистекающие из этих изобретений и инноваций, были такими, что 100-Лошадиные силы Асинхронный двигатель в настоящее время имеет те же установочные размеры, что и двигатель мощностью 7,5 лошадиных сил в 1897 году.[12]
Принцип действия


Как в индукции, так и в синхронные двигатели, мощность переменного тока, подаваемая на двигатель статор создает магнитное поле который вращается синхронно с колебаниями переменного тока. В то время как ротор синхронного двигателя вращается с той же скоростью, что и поле статора, ротор асинхронного двигателя вращается с несколько меньшей скоростью, чем поле статора. Следовательно, магнитное поле статора асинхронного двигателя изменяется или вращается относительно ротора. Это индуцирует встречный ток в роторе асинхронного двигателя, фактически во вторичной обмотке двигателя, когда последняя замкнута накоротко или замкнута из-за внешнего импеданса.[28] Вращающийся магнитный поток наводит токи в обмотках ротора,[29] аналогично токам, индуцированным в трансформатор вторичная обмотка (и).
Индуцированные токи в обмотках ротора, в свою очередь, создают магнитные поля в роторе, которые противодействуют полю статора. Направление создаваемого магнитного поля должно быть таким, чтобы противодействовать изменению тока через обмотки ротора, в соответствии с Закон Ленца. Причиной наведенного тока в обмотках ротора является вращающееся магнитное поле статора, поэтому, чтобы противодействовать изменению токов обмотки ротора, ротор начинает вращаться в направлении вращающегося магнитного поля статора. Ротор ускоряется до тех пор, пока величина индуцированного тока ротора и крутящего момента не уравновесит приложенную механическую нагрузку на вращение ротора. Поскольку вращение с синхронной скоростью не приведет к возникновению индуцированного тока ротора, асинхронный двигатель всегда работает немного медленнее, чем синхронная скорость. Разница или «проскальзывание» между фактической и синхронной скоростью варьируется от 0,5% до 5,0% для стандартных асинхронных двигателей с кривой крутящего момента конструкции B.[30] Существенный характер асинхронного двигателя заключается в том, что он создается исключительно за счет индукции, а не отдельно возбуждается, как в синхронных машинах или машинах постоянного тока, или самонамагничивается, как в двигатели с постоянными магнитами.[28]
Для индуцирования токов ротора скорость физического ротора должна быть ниже, чем скорость вращающегося магнитного поля статора (); в противном случае магнитное поле не перемещалось бы относительно проводников ротора и не возникало бы тока. Когда скорость ротора падает ниже синхронной скорости, скорость вращения магнитного поля в роторе увеличивается, вызывая больший ток в обмотках и создавая больший крутящий момент. Соотношение между скоростью вращения магнитного поля, индуцированного в роторе, и скоростью вращения вращающегося поля статора называется «скольжением». Под нагрузкой скорость падает, а скольжение увеличивается настолько, чтобы создать достаточный крутящий момент для поворота нагрузки. По этой причине асинхронные двигатели иногда называют «асинхронными двигателями».[31]

Асинхронный двигатель можно использовать как индукционный генератор, или его можно развернуть, чтобы сформировать линейный асинхронный двигатель который может напрямую генерировать линейное движение. Генераторный режим для асинхронных двигателей усложняется необходимостью возбуждать ротор, который начинается только с остаточного намагничивания. В некоторых случаях этой остаточной намагниченности достаточно для самовозбуждения двигателя под нагрузкой. Следовательно, необходимо либо защелкнуть двигатель и на мгновение подключить его к сети, находящейся под напряжением, либо добавить конденсаторы, первоначально заряженные остаточным магнетизмом и обеспечивающие требуемую реактивную мощность во время работы. Аналогичным образом работает асинхронный двигатель параллельно с синхронным двигателем, служащим компенсатором коэффициента мощности. Особенностью режима генератора параллельно сети является то, что частота вращения ротора выше, чем в режиме движения. Затем в сеть передается активная энергия.[2] Еще одним недостатком асинхронного двигателя-генератора является то, что он потребляет значительный ток намагничивания. я0 = (20-35)%.
Синхронная скорость
Синхронная скорость двигателя переменного тока, , - скорость вращения магнитного поля статора,

- ,

куда частота источника питания, - количество магнитных полюсов, а - синхронная скорость машины. За в герц и синхронная скорость в Об / мин, формула принимает следующий вид:



Например, для четырехполюсного трехфазного двигателя = 4 и = 1500 об / мин (для = 50 Гц) и 1800 об / мин (для = 60 Гц) синхронная скорость.

Количество магнитных полюсов, , равно количеству катушечных групп на фазу. Чтобы определить количество групп катушек на фазу в трехфазном двигателе, подсчитайте количество катушек, разделите на количество фаз, которое равно 3. Катушки могут занимать несколько пазов в сердечнике статора, что затрудняет их подсчет. . Для трехфазного двигателя, если вы насчитаете в общей сложности 12 групп катушек, он имеет 4 магнитных полюса. Для 12-полюсной 3-фазной машины будет 36 катушек. Количество магнитных полюсов в роторе равно количеству магнитных полюсов в статоре.
На двух рисунках справа и слева над каждой из них изображена 2-полюсная 3-фазная машина, состоящая из трех пар полюсов, каждая из которых расположена на расстоянии 60 ° друг от друга.
Соскальзывать

Соскальзывать, , определяется как разница между синхронной скоростью и рабочей скоростью на одной и той же частоте, выраженная в об / мин, или в процентах или соотношении синхронной скорости. Таким образом


куда электрическая скорость статора, - механическая скорость ротора.[34][35] Скольжение, которое изменяется от нуля при синхронной скорости до 1 при остановке ротора, определяет крутящий момент двигателя. Поскольку короткозамкнутые обмотки ротора имеют небольшое сопротивление, даже небольшое скольжение вызывает большой ток в роторе и создает значительный крутящий момент.[36] При полной номинальной нагрузке скольжение изменяется от более 5% для двигателей малого или специального назначения до менее 1% для двигателей большой мощности.[37] Эти колебания скорости могут вызвать проблемы с распределением нагрузки при механическом соединении двигателей разных размеров.[37] Доступны различные методы для уменьшения скольжения, частотно-регулируемые приводы часто предлагают лучшее решение.[37]

Крутящий момент
Стандартный крутящий момент



Типичное соотношение скорости и крутящего момента стандартного многофазного асинхронного двигателя NEMA Design B показано на кривой справа. Двигатели конструкции B, подходящие для большинства низкопроизводительных нагрузок, таких как центробежные насосы и вентиляторы, ограничены следующими типичными диапазонами крутящего момента:[30][b]
- Момент пробоя (пиковый крутящий момент), 175–300% от номинального крутящего момента
- Крутящий момент заторможенного ротора (крутящий момент при 100% скольжении), 75–275% от номинального крутящего момента
- Повышающий крутящий момент, 65–190% от номинального крутящего момента.
В нормальном диапазоне нагрузок двигателя крутизна крутящего момента приблизительно линейна или пропорциональна скольжению, потому что значение сопротивления ротора, деленное на скольжение, , линейно доминирует над крутящим моментом.[38] Когда нагрузка превышает номинальную, коэффициенты реактивного сопротивления утечки статора и ротора постепенно становятся более значительными по сравнению с так что крутящий момент постепенно изменяется в сторону крутящего момента пробоя. Когда крутящий момент нагрузки увеличивается сверх момента пробоя, двигатель глохнет.

Запуск
Существует три основных типа малых асинхронных двигателей: однофазные с расщепленными полюсами, однофазные с расщепленными полюсами и многофазные.
В двухполюсных однофазных двигателях крутящий момент стремится к нулю при 100% скольжении (нулевая скорость), поэтому для этого требуются изменения в статоре, такие как заштрихованные столбы для обеспечения пускового момента. Однофазный асинхронный двигатель требует отдельной пусковой цепи для обеспечения вращающегося поля на двигатель. Нормально работающие обмотки в таком однофазном двигателе могут вызвать вращение ротора в любом направлении, поэтому пусковая схема определяет рабочее направление.

В некоторых однофазных двигателях меньшего размера запуск осуществляется путем поворота медного провода вокруг части полюса; такой полюс называется заштрихованным полюсом. Ток, наведенный в этом витке, отстает от тока питания, создавая запаздывающее магнитное поле вокруг заштрихованной части лицевой стороны полюса. Это обеспечивает достаточную энергию вращательного поля для запуска двигателя. Эти двигатели обычно используются в таких приложениях, как настольные вентиляторы и проигрыватели грампластинок, поскольку требуемый пусковой крутящий момент невелик, а низкая эффективность является приемлемой по сравнению со сниженной стоимостью двигателя и метода запуска по сравнению с другими конструкциями двигателей переменного тока.
Однофазные двигатели большего размера двухфазные двигатели и иметь вторую обмотку статора, питаемую противофазным током; такие токи могут быть созданы, пропуская обмотку через конденсатор или получая разные значения индуктивности и сопротивления от основной обмотки. В конденсаторный пуск В конструкциях вторая обмотка отключается, когда двигатель набирает обороты, обычно центробежным переключателем, воздействующим на груз на валу двигателя, или термистор который нагревается и увеличивает свое сопротивление, снижая ток через вторую обмотку до незначительного уровня. В конденсаторный конструкции сохраняют вторую обмотку во время работы, улучшая крутящий момент. А начало сопротивления В конструкции используется пускатель, включенный последовательно с пусковой обмоткой, создающий реактивное сопротивление.
Самозапускающиеся многофазные асинхронные двигатели создают крутящий момент даже в состоянии покоя. Доступные методы пуска асинхронных двигателей с короткозамкнутым ротором включают прямой пуск, пуск реактора пониженного напряжения или автотрансформатора, пуск звезда-треугольник или, все чаще, новые твердотельные мягкие сборки и, конечно же, частотно-регулируемые приводы (ЧРП).[39]
Многофазные двигатели имеют стержни ротора, форма которых обеспечивает различные характеристики скорости-момента. Распределение тока в стержнях ротора зависит от частоты индуцированного тока. В состоянии покоя ток ротора имеет ту же частоту, что и ток статора, и имеет тенденцию проходить через крайние части стержней ротора сепаратора (за счет скин эффект ). Различные формы стержней могут дать полезные различные характеристики скорости-момента, а также некоторый контроль над пусковым током при запуске.
Хотя многофазные двигатели по своей природе самозапускаются, их расчетные пределы пускового момента и пускового момента должны быть достаточно высокими, чтобы преодолевать реальные условия нагрузки.
В двигателях с фазным ротором соединение цепи ротора через контактные кольца с внешними сопротивлениями позволяет изменять характеристики скорости-момента для управления ускорением и регулированием скорости.
Контроль скорости
Сопротивление

До развития полупроводника силовая электроника, было трудно изменять частоту, и асинхронные двигатели с сепаратором в основном использовались в приложениях с фиксированной скоростью. Такие приложения, как электрические мостовые краны, использовали приводы постоянного тока или двигатели с фазным ротором (WRIM) с контактные кольца для подключения контура ротора к переменному внешнему сопротивлению, позволяющему регулировать скорость в широких пределах. Однако потери в резисторах, связанные с работой WRIM на низкой скорости, являются основным недостатком стоимости, особенно для постоянных нагрузок.[40] Приводы двигателей с большими токосъемными кольцами, называемые системами рекуперации энергии скольжения, некоторые из которых все еще используются, рекуперируют энергию из контура ротора, выпрямляют ее и возвращают в систему питания с помощью частотно-регулируемого привода.
Каскад
Скорость пары электродвигателей с фазным ротором может регулироваться каскадным соединением или конкатенацией. Ротор одного двигателя соединен со статором другого.[41][42] Если два двигателя также соединены механически, они будут работать с половинной скоростью. Эта система когда-то широко использовалась в железнодорожных локомотивах трехфазного переменного тока, таких как FS класс E.333.
Частотно-регулируемый привод

Во многих промышленных применениях с регулируемой скоростью приводы постоянного тока и WRIM заменяются асинхронными двигателями с частотно-регулируемым приводом. Наиболее распространенный эффективный способ управления скоростью асинхронного двигателя многих нагрузок - это частотно-регулируемые приводы. Барьеры на пути к внедрению частотно-регулируемых приводов из-за соображений стоимости и надежности были значительно уменьшены за последние три десятилетия, так что, по оценкам, приводная технология применяется в 30–40% всех вновь установленных двигателей.[43]
Преобразователи частоты реализуют скалярное или векторное управление асинхронным двигателем.
С скалярное управление, без контроля фазы (отсутствие обратной связи по положению ротора) контролируются только величина и частота напряжения питания. Скалярное управление подходит для приложений, где нагрузка постоянна.
Векторное управление позволяет независимо управлять скоростью и крутящим моментом двигателя, что позволяет поддерживать постоянную скорость вращения при изменении момента нагрузки. Но векторное управление дороже из-за стоимости датчика (не всегда) и необходимости более мощного контроллера.[44]
Строительство

Статор асинхронного двигателя состоит из полюсов, по которым проходит ток питания, чтобы индуцировать магнитное поле, пронизывающее ротор. Чтобы оптимизировать распределение магнитного поля, обмотки распределены в пазах вокруг статора, причем магнитное поле имеет одинаковое количество северных и южных полюсов. Асинхронные двигатели чаще всего работают от однофазного или трехфазного питания, но существуют двухфазные двигатели; Теоретически асинхронные двигатели могут иметь любое количество фаз. Многие однофазные двигатели с двумя обмотками можно рассматривать как двухфазные, поскольку конденсатор используется для генерации второй фазы мощности под углом 90 ° от однофазного источника питания и подачи ее на вторую обмотку двигателя. Однофазные двигатели требуют наличия какого-либо механизма для создания вращающегося поля при запуске. Токопроводящие шины ротора асинхронного двигателя с сепаратором обычно перекошены, чтобы избежать магнитной блокировки.
Стандартизованные размеры корпуса двигателя NEMA и IEC во всей отрасли приводят к взаимозаменяемым размерам для вала, крепления на лапах, общих аспектов, а также некоторых аспектов фланца двигателя. Поскольку открытая конструкция двигателя с защитой от капель (ODP) допускает свободный воздухообмен извне к внутренним обмоткам статора, этот тип двигателя имеет тенденцию быть немного более эффективным, поскольку обмотки более холодные. При данной номинальной мощности для более низкой скорости требуется рама большего размера.[45]
Реверс вращения
Способ изменения направления вращения асинхронного двигателя зависит от того, является ли он трехфазным или однофазным. В случае трехфазного тока реверс легко реализуется путем переключения местами любых двух фазных проводов.
В однофазном двигателе с расщепленной фазой реверсирование достигается путем изменения соединения между первичной обмоткой и цепью запуска. Некоторые однофазные двигатели с расщепленной фазой, разработанные для конкретных применений, могут иметь внутреннее соединение между первичной обмоткой и цепью пуска, так что вращение не может быть изменено. Кроме того, однофазные двигатели с расщепленными полюсами имеют фиксированное вращение, и направление не может быть изменено, кроме как путем разборки двигателя и поворота статора в противоположную сторону относительно исходного направления ротора.
Фактор силы
В фактор силы асинхронных двигателей изменяется в зависимости от нагрузки, обычно от 0,85 или 0,90 при полной нагрузке до примерно 0,20 без нагрузки,[39] из-за утечки статора и ротора и реактивных сопротивлений намагничивания.[46] Коэффициент мощности можно улучшить, подключив конденсаторы либо к отдельному двигателю, либо, предпочтительно, к общей шине, охватывающей несколько двигателей. По экономическим и другим соображениям в энергосистемах коэффициент мощности редко корректируется до единичного коэффициента мощности.[47]Применение силовых конденсаторов с гармоническими токами требует анализа энергосистемы, чтобы избежать гармонического резонанса между конденсаторами и реактивными сопротивлениями трансформатора и цепи.[48] Для минимизации резонансного риска и упрощения анализа энергосистемы рекомендуется коррекция коэффициента мощности общей шины.[48]
Эффективность

КПД двигателя при полной нагрузке составляет около 85–97%, соответствующие потери двигателя разбиваются примерно следующим образом:[49]
- Трение и парусность, 5–15%
- Утюг или потери в сердечнике, 15–25%
- Потери в статоре, 25–40%
- Потери в роторе, 15–25%
- Потери от паразитной нагрузки 10–20%.
Различные регулирующие органы во многих странах приняли и внедрили законы, поощряющие производство и использование электродвигателей с более высоким КПД. Существует существующее и готовящееся к рассмотрению законодательство относительно будущего обязательного использования асинхронных двигателей с повышенным КПД в определенном оборудовании. Для получения дополнительной информации см .: Премиальная эффективность.
Эквивалентная схема Штейнмеца
Многие полезные взаимосвязи двигателя между временем, током, напряжением, скоростью, коэффициентом мощности и крутящим моментом можно получить из анализа Steinmetz эквивалентная схема (также называемая Т-образной схемой или эквивалентной схемой, рекомендованной IEEE), математическая модель, используемая для описания того, как входная электрическая мощность асинхронного двигателя преобразуется в полезную выходную механическую энергию. Эквивалентная схема представляет собой однофазное представление многофазного асинхронного двигателя, действующего в установившихся условиях сбалансированной нагрузки.
Эквивалентная схема Штейнмеца выражается просто через следующие компоненты:
- Статора сопротивление и реактивное сопротивление утечки (, ).
- Ротор сопротивление, реактивное сопротивление утечки и скольжение (, или же , , и ).
- Намагничивание реактивное сопротивление ().







Перефразируя Алджера в Ноултоне, асинхронный двигатель - это просто электрический трансформатор, магнитная цепь которого разделена воздушным зазором между обмоткой статора и подвижной обмоткой ротора.[28] Соответственно, эквивалентная схема может быть показана либо с компонентами эквивалентной схемы соответствующих обмоток, разделенных идеальным трансформатором, либо с компонентами ротора, относящимися к стороне статора, как показано в следующей схеме и соответствующих таблицах уравнений и определений параметров.[39][47][50][51][52][53]

| Определения параметров цепи | ||
|---|---|---|
| Единицы | ||
| статор частота источника | Гц | |
| статор синхронная частота | Гц | |
| ротор скорость в число оборотов в минуту | об / мин | |
| синхронная скорость в оборотах в минуту | об / мин | |
| статор или первичный Текущий | А | |
| ротор или вторичный ток относительно стороны статора | А | |
| ток намагничивания | А | |
| мнимое число, или 90 ° вращение, оператор | ||
| Тевенин коэффициент реактивного сопротивления | ||
| количество фаз двигателя | ||
| количество полюсов двигателя | ||
| электромеханическая мощность | Вт или л.с. | |
| мощность воздушного зазора | W | |
| ротор потери меди | W | |
| входная мощность | W | |
| потеря в сердечнике | W | |
| потери на трение и парусность | W | |
| входная мощность ходового света ватт | W | |
| потеря паразитной нагрузки | W | |
| статора или первичного сопротивления и реактивное сопротивление утечки | Ω | |
| сопротивление ротора или вторичной обмотки и реактивное сопротивление утечки относительно стороны статора | Ω | |
| сопротивление и реактивное сопротивление утечки на входе двигателя | Ω | |
| Сочетание эквивалентного сопротивления Тевенина и реактивного сопротивления утечки и | Ω | |
| соскальзывать | ||
| электромагнитный момент | Нм или фут-фунт | |
| момент пробоя | Нм или фут-фунт | |
| сжатая фаза статора Напряжение | V | |
| намагничивание реактивное сопротивление | Ω | |
| Ω | ||
| статор или первичный сопротивление | Ω | |
| сопротивление ротора или вторичной обмотки относительно первичной | Ω | |
| полное сопротивление статора двигателя или первичного входа | Ω | |
| комбинированный ротор или вторичный и намагничивающий импеданс | Ω | |
| Импеданс эквивалентной схемы Тевенина, | Ω | |
| скорость ротора | рад / с | |
| синхронная скорость | рад / с | |
| Мхо | ||
| Ω | ||








































Следующие практические приближения применяются к схеме:[53][54][55]
- Максимальный ток возникает в условиях тока заторможенного ротора (LRC) и несколько меньше , при этом LRC обычно в 6-7 раз превышает номинальный ток для двигателей стандартной конструкции B.[30]
- Момент пробоя происходит когда и такой, что и, таким образом, при постоянном входном напряжении максимальный крутящий момент асинхронного двигателя с низким проскальзыванием составляет примерно половину от номинального значения LRC.
- Относительное реактивное сопротивление утечки статора к ротору асинхронных двигателей стандартной конструкции с корпусом B составляет[56]
- .
- Если пренебречь сопротивлением статора, кривая крутящего момента асинхронного двигателя сводится к уравнению Клосса[57]
- , куда скользит по .







| Основные электрические уравнения | ||
|---|---|---|
Эквивалентный импеданс двигателя на входе Ток статора Ток ротора относительно стороны статора в терминах тока статора | ||




| Уравнения мощности | ||
|---|---|---|
Из эквивалентной схемы Штейнмеца имеем То есть мощность воздушного зазора равна выходной электромеханической мощности плюс потери в меди в роторе. Выражение электромеханической выходной мощности через скорость ротора
Выражая в фут-фунтах:
| ||





| Уравнения крутящего момента | ||
|---|---|---|
Чтобы иметь возможность выразить непосредственно с точки зрения , IEEE рекомендует и преобразовать в Тевенин эквивалентная схема 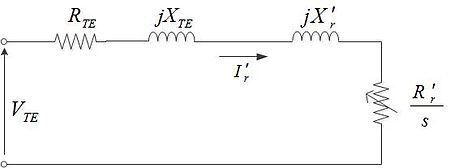 IEEE рекомендовала эквивалентную схему Тевенина куда С и , и позволяя Для низких значений скольжения:
Для высоких значений скольжения
Для максимального крутящего момента или момента пробоя, который не зависит от сопротивления ротора.
Соответствующее скольжение при максимальном или пробивном моменте В фут-фунтах
| ||


















Линейный асинхронный двигатель
Линейные асинхронные двигатели, которые работают по тем же общим принципам, что и роторные асинхронные двигатели (часто трехфазные), предназначены для движения по прямой. Использование включает Магнитная левитация, линейная силовая установка, линейные приводы, и жидкий металл перекачка.[58]
Смотрите также
- Двигатель переменного тока
- Круговая диаграмма
- Индукционный генератор
- Премиальная эффективность
- Переменный поток хладагента
Примечания
- ^ То есть электрические соединения, требующие механическая коммутация, раздельное возбуждение или самовозбуждение для всей или части энергии, передаваемой от статора к ротору, как указано в универсальный, ОКРУГ КОЛУМБИЯ и синхронный моторы.
- ^ NEMA MG-1 определяет а) момент пробоя как максимальный крутящий момент, развиваемый двигателем при номинальном напряжении, приложенном при номинальной частоте без резкого падения скорости, б) крутящий момент заторможенного ротора как минимальный крутящий момент, развиваемый двигателем в состоянии покоя с номинальным напряжением прикладываемого при номинальной частоте, и c) крутящий момент, равный минимальному крутящему моменту, развиваемому двигателем в период ускорения от состояния покоя до скорости, при которой возникает момент пробоя.
Рекомендации
- ^ IEC 60050 (Дата публикации: 1990-10). Раздел 411-31: Машины вращения - Общие, IEV исх. 411-31-10: "Индукционная машина- асинхронная машина, у которой только одна обмотка находится под напряжением ».
- ^ а б Бэббидж, К .; Гершель, Дж. Ф. У. (январь 1825 г.). «Отчет о повторении экспериментов М. Араго с магнетизмом, проявляемым различными веществами во время акта вращения». Философские труды Королевского общества. 115: 467–496. Bibcode:1825РСПТ..115..467Б. Дои:10.1098 / рстл.1825.0023. Получено 2 декабря 2012.
- ^ Томпсон, Сильванус Филлипс (1895). Многофазные электрические токи и двигатели переменного тока (1-е изд.). Лондон: E. & F.N. Spon. п. 261. Получено 2 декабря 2012.
- ^ Бейли, Уолтер (28 июня 1879 г.). "Режим производства вращения Араго". Философский журнал. Тейлор и Фрэнсис. 3 (1): 115–120. Bibcode:1879PPSL .... 3..115B. Дои:10.1088/1478-7814/3/1/318.
- ^ а б Вучкович, Владан (ноябрь 2006 г.). «Толкование открытия» (PDF). Сербский журнал инженеров-электриков. 3 (2). Получено 10 февраля 2013.
- ^ Инженер-электрик, том 5. (февраль 1890 г.)
- ^ Электрик, Том 50. 1923
- ^ Официальный вестник Патентного ведомства США: Том 50 (1890 г.)
- ^ Евгений Кац. "Блати". People.clarkson.edu. Архивировано из оригинал 25 июня 2008 г.. Получено 2009-08-04.
- ^ Рикс, Г.В.Д. (Март 1896 г.). «Счетчики электроэнергии». Журнал Института инженеров-электриков. 25 (120): 57–77. Дои:10.1049 / jiee-1.1896.0005.
- ^ Феррарис, Г. (1888). "Атти делла Реале Академия делле науки Турина". Атти делла Р. Академия делле науки Турина. XXIII: 360–375.
- ^ а б c d е ж грамм Alger, P.L .; Арнольд, Р. (1976). «История индукционных двигателей в Америке». Труды IEEE. 64 (9): 1380–1383. Дои:10.1109 / PROC.1976.10329. S2CID 42191157.
- ^ Фрёлих, главный редактор Фриц Э. Аллен Кент Соредактор (1992). Энциклопедия телекоммуникаций Фрёлиха / Кента: Том 17 - Телевизионные технологии для подключения антенн (Первое изд.). Нью-Йорк: Marcel Dekker, Inc., стр. 36. ISBN 978-0-8247-2902-8.
- ^ Инженер-электрик (21 сентября 1888 г.). . . . о новом применении переменного тока для создания вращательного движения почти одновременно сообщили два экспериментатора, Никола Тесла и Галилео Феррарис, и этот предмет привлек всеобщее внимание тем фактом, что не было коммутатора или какого-либо соединения с якорем. требуется. . . . Том II. Лондон: Charles & Co., стр. 239.
- ^ Феррарис, Галилей (1885). «Электромагнитное вращение с переменным током». Электрик. 36: 360–375.
- ^ Тесла, Никола; AIEE Trans. (1888). «Новая система для двигателей и трансформаторов переменного тока». AIEE. 5: 308–324. Получено 17 декабря 2012.
- ^ Джилл Джоннес, Империи света: Эдисон, Тесла, Вестингауз и гонка за электричество мира, Эдисон объявляет войну
- ^ Электрический мир, Том 78, № 7. стр. 340
- ^ Клоостер, Джон В. (30 июля 2009 г.). Иконы изобретений создателей современного мира от Гутенберга до Гейтса. Санта-Барбара: ABC-CLIO. п. 305. ISBN 978-0-313-34744-3. Получено 10 сентября 2012.
- ^ Дэй, Лэнс (1996). Макнил, Ян (ред.). Биографический словарь истории техники. Лондон: Рутледж. п. 1204. ISBN 978-0-203-02829-2. Получено 2 декабря 2012.
- ^ Хаббелл, М.В. (2011). Основы атомной энергетики Вопросы и ответы. Авторский дом. п. 27. ISBN 978-1463424411.
- ^ Комитет VDE История электротехники Немецкое отделение IEEE (январь 2012 г.). "150 лет со дня рождения коллоквиума Михаила фон Доливо-Добровольского". 13. Архивировано из оригинал 25 февраля 2013 г.. Получено 10 февраля 2013. Цитировать журнал требует
| журнал =(помощь) - ^ Доливо-Добровольский, М. (1891). ETZ. 12: 149, 161. Отсутствует или пусто
| название =(помощь) - ^ Кеннелли, Артур Э. (январь 1893 г.). «Импеданс». Труды Американского института инженеров-электриков. Икс: 172–232. Дои:10.1109 / T-AIEE.1893.4768008.
- ^ Штейнмец, Чарльз Портеус (1897). «Асинхронный двигатель переменного тока». AIEE Trans. XIV (1): 183–217. Дои:10.1109 / T-AIEE.1897.5570186. S2CID 51652760.
- ^ Банихашеми, Абдолмаджид (1973). Определение потерь в индукционных машинах из-за гармоник. (PDF). Фредериктон, Н.Б .: Университет Нью-Брансуика. С. 1, 5–8. Архивировано из оригинал (PDF) на 2013-07-04.
- ^ Стейнмец, Чарльз Протеус; Берг, Эрнст Дж. (1897). Теория и расчет явлений переменного тока. Издательская компания McGraw. ПР 7218906M.
- ^ а б c Alger, Philip L .; и другие. (1949). "'Подраздел «Индукционные машины» гл. 7 - Генераторы переменного тока и двигатели ». In Knowlton, A.E. (ed.). Стандартное руководство для инженеров-электриков (8-е изд.). Макгроу-Хилл. п. 705.
- ^ "AC Motors". NSW HSC Online - Университет Чарльза Стерта. Архивировано из оригинал 30 октября 2012 г.. Получено 2 декабря 2012.
- ^ а б c NEMA MG-1 2007 Сжатый (2008). Информационное руководство по стандартам малых и средних асинхронных двигателей переменного тока общего назначения с короткозамкнутым ротором. Росслин, Вирджиния США: NEMA. п. 29 (Таблица 11). Получено 2 декабря 2012.
- ^ «Асинхронные двигатели» (PDF). Университет штата Миссисипи, факультет электротехники и вычислительной техники, курс ECE 3183, «Электротехнические системы для специальностей, не относящихся к ECE». Архивировано из оригинал (PDF) 15 мая 2016 г.. Получено 2 декабря 2012.
- ^ «Асинхронные двигатели». electricmotors.machinedesign.com. Penton Media, Inc. Архивировано с оригинал на 2007-11-16. Получено 2016-04-12.
- ^ «Моторные формулы». elec-toolbox.com. Архивировано из оригинал 8 мая 1999 г.. Получено 1 января 2013.
- ^ Шривастава, Авинаш; Кумар, Рави. «Характеристики скольжения по крутящему моменту асинхронного двигателя». Примечания к курсу. Малнадский инженерный колледж.
- ^ Публикация стандартов NEMA (2007). Руководство по применению систем приводов с регулируемой скоростью переменного тока. Росслин, Вирджиния США: NEMA. п. 6. Архивировано из оригинал 28 апреля 2008 г.. Получено 2 декабря 2012.
- ^ Герман, Стивен Л. (2011). Основы переменного тока (8-е изд.). США: Cengage Learning. С. 529–536. ISBN 978-1-111-03913-4.
- ^ а б c Пелтола, Маури. «Скольжение асинхронного двигателя переменного тока». Plantservices.com. Получено 18 декабря 2012.
- ^ Келджик, Джеффри (2009). «Глава 12 - Трехфазный асинхронный двигатель с короткозамкнутым ротором». Электричество 4: двигатели постоянного и переменного тока, средства управления и обслуживание (9-е изд.). Клифтон-Парк, штат Нью-Йорк: Делмар, Cengage Learning. С. 112–115. ISBN 978-1-4354-0031-3.
- ^ а б c Лян, Сяодун; Илочонву, Обинна (январь 2011 г.). «Запуск асинхронных двигателей в практических промышленных применениях». IEEE Transactions по отраслевым приложениям. 47 (1): 271–280. Дои:10.1109 / TIA.2010.2090848. S2CID 18982431.
- ^ Джамиль Асгар, M.S. (2003). «Регулирование скорости асинхронных двигателей с фазным ротором с помощью регулятора переменного тока на основе оптимального регулирования напряжения». Силовая электроника и приводные системы, 2003. Пятая международная конференция по. 2: 1037–1040. Дои:10.1109 / PEDS.2003.1283113. ISBN 978-0-7803-7885-8. S2CID 113603428.
- ^ «Каскадное управление». Ваш электрический дом. Получено 22 февраля 2018.
- ^ «Каскадное управление». BrainKart. Получено 22 февраля 2018.
- ^ Ленденманн, Хайнц; и другие. "Motoring Ahead" (PDF). Получено 18 апреля, 2012.[постоянная мертвая ссылка ]
- ^ «Принцип работы трехфазного асинхронного двигателя».
- ^ Группа компаний АББ (Baldor Electric Company) (2016). «СПЕЦИФИКАЦИОННОЕ РУКОВОДСТВО» (PDF). п. 6. Получено 4 октября 2016.
- ^ Финк, Д.Г .; Beaty, H.W. (1978). Стандартное руководство для инженеров-электриков (11-е изд.). Макгроу-Хилл. С. 20–28–20–29.
- ^ а б Джордан, Ховард Э. (1994). Энергоэффективные электродвигатели и их применение (2-е изд.). Нью-Йорк: Пленум Пресс. ISBN 978-0-306-44698-6.
- ^ а б НЕМА МГ-1, стр. 19
- ^ Министерство энергетики США (2008 г.). «Повышение эффективности двигателей и приводных систем: справочник для промышленности» (PDF). п. 27. Получено 31 декабря 2012.
- ^ Юбер, Чарльз I. (2002). Электрические машины: теория, работа, применение, регулировка и управление (2-е изд.). Река Аппер Сэдл, Нью-Джерси: Prentice Hall. С. Глава 4. ISBN 978-0130612106.
- ^ Бити, Х. Уэйн (ред.) (2006). «Раздел 5 - Трехфазные асинхронные двигатели фирмы Hashem Oraee» (PDF). Справочник по расчетам электроэнергии (3-е изд.). Нью-Йорк: Макгроу-Хилл. ISBN 0-07-136298-3. Архивировано из оригинал (PDF) на 13.08.2012.CS1 maint: дополнительный текст: список авторов (связь)
- ^ Рыцарь, Энди. «Трехфазные индукционные машины». Организатор Университета Альберты. Архивировано из оригинал 15 января 2013 г.. Получено 21 декабря 2012.
- ^ а б IEEE 112 (2004 г.). Стандартная процедура испытаний IEEE для многофазных асинхронных двигателей и генераторов. Нью-Йорк, Нью-Йорк: IEEE. ISBN 978-0-7381-3978-4.
- ^ Алджер (1949), стр. 711
- ^ а б c d е Озюрт, Ç.H. (2005). Оценка параметров и скорости асинхронных двигателей на основе данных производителей и измерений (PDF). Ближневосточный технический университет. С. 33–34.
- ^ Рыцарь, Энди. «Определение параметров индукционной машины». Организатор Университета Альберты. Архивировано из оригинал 29 ноября 2012 г.. Получено 31 декабря 2012.
- ^ Хамейер, Кей (2001). «Электрическая машина I: основы, конструкция, функции, работа» (PDF). RWTH Институт электрических машин Ахенского университета. Архивировано из оригинал (PDF) 10 февраля 2013 г.. Получено 11 января 2013.page = 133
- ^ Бюллетень ученых-атомщиков. Образовательный фонд атомной науки. 6 июня 1973 г.. Получено 8 августа 2012.
Классические источники
- Бейли, Бенджамин Франклин (1911). Асинхронный двигатель. Макгроу-Хилл.
Индукционный двигатель.
- Беренд, Бернхард Артур (1901). Асинхронный двигатель: краткое изложение теории и конструкции с многочисленными экспериментальными данными и диаграммами. Издательская компания McGraw / Электрический мир и инженер.
- Мальчик де ла Тур, Анри (1906). Асинхронный двигатель: теория и конструкция, изложенные практическим методом расчета. Переводил Сиприен Одилон Майю. McGraw Pub. Co.
внешняя ссылка
- Сильванус Филлипс Томпсон: Многофазные электрические токи и двигатели переменного тока
- Темы об асинхронных двигателях с веб-сайта Hyperphysics, размещенного C.R. Nave, Отделение физики и астрономии GSU.
| Карьера и изобретения |
|  |
|---|---|---|
| Сочинения | ||
| Другой | ||
| Связанный |
| |