Синхронный двигатель - Synchronous motor


А синхронный электродвигатель является Двигатель переменного тока в котором на устойчивое состояние,[1] вращение вала синхронизировано с частота питающего тока; период вращения в точности равен целому числу AC циклы. Синхронные двигатели содержат многофазный переменный ток. электромагниты на статор двигателя, которые создают магнитное поле который вращается во времени с колебаниями линейного тока. В ротор с постоянными магнитами или электромагнитами поворачивается синхронно с полем статора с той же скоростью и, в результате, обеспечивает второе синхронизированное вращающееся магнитное поле любого двигателя переменного тока. Синхронный двигатель называется вдвойне накормленный если он снабжен многофазными электромагнитами переменного тока с независимым возбуждением как на роторе, так и на статоре.
Синхронный двигатель и Индукционный двигатель являются наиболее широко используемыми типами двигателей переменного тока. Разница между этими двумя типами заключается в том, что синхронный двигатель вращается со скоростью, привязанной к частоте сети, поскольку он не полагается на индукцию тока для создания магнитного поля ротора. Напротив, асинхронный двигатель требует соскальзывать: ротор должен вращаться немного медленнее, чем переменный ток, чтобы индуцировать ток в обмотке ротора. Малые синхронные двигатели используются в устройствах синхронизации, таких как синхронные часы, таймеры в бытовой технике, магнитофоны и точность сервомеханизмы в котором двигатель должен работать с точной скоростью; точность скорости такая же, как у частота линии электропередачи, который тщательно контролируется в крупных взаимосвязанных сетевых системах.
Синхронные двигатели доступны в самовозбужденный субфракционные размеры лошадиных сил[2] до промышленных размеров большой мощности.[1] В диапазоне дробных лошадиных сил используется большинство синхронных двигателей там, где требуется точная постоянная скорость. Эти машины обычно используются в аналоговых электрических часах, таймерах и других устройствах, где требуется точное время. В промышленных масштабах с большей мощностью синхронный двигатель выполняет две важные функции. Во-первых, это высокоэффективное средство преобразования энергии переменного тока в работу. Во-вторых, он может работать на опережение или на единицу. фактор силы и тем самым обеспечить коррекцию коэффициента мощности.
Тип
Синхронные двигатели подпадают под более общую категорию синхронные машины который также включает синхронный генератор. Генератор Действие будет наблюдаться, если полюса поля «движутся впереди результирующего потока в воздушном зазоре за счет поступательного движения первичный двигатель ". Мотор действие будет наблюдаться, если полюса поля «увлечены» за результирующим потоком в воздушном зазоре из-за замедления крутящий момент вала нагрузка ".[1]
В зависимости от намагничивания ротора существует два основных типа синхронных двигателей: не возбужденный и возбужденный постоянным током.[3]
Двигатели без возбуждения

В двигателях без возбуждения ротор выполнен из стали. На синхронной скорости он вращается синхронно с вращающимся магнитным полем статора, поэтому через него проходит почти постоянное магнитное поле. Внешнее поле статора намагничивает ротор, вызывая магнитные полюса, необходимые для его вращения. Ротор выполнен из высокопрочногосохраняемость сталь, такая как кобальт сталь. Они производятся в постоянных магнит, нежелание и гистерезис конструкции:[4]
Электродвигатели сопротивления
Они имеют ротор, состоящий из цельной стальной отливки с выступающими (выступающими) зубчатыми полюсами. Обычно ротора меньше, чем полюсов статора, чтобы свести к минимуму пульсация крутящего момента и для предотвращения одновременного выравнивания всех полюсов - положение, при котором не создается крутящий момент.[2][5] Размер воздушного зазора в магнитной цепи и, следовательно, нежелание минимален, когда полюса выровнены с (вращающимся) магнитным полем статора, и увеличивается с увеличением угла между ними. Это создает крутящий момент, вынуждающий ротор выравниваться с ближайшим полюсом поля статора. Таким образом, при синхронной скорости ротор «заблокирован» относительно вращающегося поля статора. Это не может запустить двигатель, поэтому полюса ротора обычно имеют Беличья клетка в них встроены обмотки, обеспечивающие крутящий момент ниже синхронной скорости. Машина запускается как асинхронный двигатель до тех пор, пока не достигнет синхронной скорости, когда ротор «втягивается» и фиксируется на поле вращающегося статора.[6]
Конструкции реактивных двигателей имеют номинальные значения от долей лошадиных сил (несколько ватт) до примерно 22 кВт. Электродвигатели с очень малым сопротивлением крутящий момент, и обычно используются для измерительных приложений. В многоцелевых двигателях с умеренным крутящим моментом используется конструкция с короткозамкнутым ротором и зубчатыми роторами. При использовании источника питания с регулируемой частотой все двигатели в системе привода могут управляться с одинаковой скоростью. Частота источника питания определяет рабочую скорость двигателя.
Гистерезисные двигатели
Они имеют прочный гладкий цилиндрический ротор, отлитый из высокой принуждение магнитно «твердая» кобальтовая сталь.[5] Этот материал имеет широкий петля гистерезиса (высоко принуждение ), что означает, что когда он намагничивается в заданном направлении, ему требуется большое обратное магнитное поле для изменения намагниченности. Вращающееся поле статора заставляет каждый небольшой объем ротора испытывать обратное магнитное поле. Из-за гистерезиса фаза намагниченности отстает от фазы приложенного поля. В результате ось магнитного поля, индуцированного в роторе, отстает от оси поля статора на постоянный угол δ, создавая крутящий момент, когда ротор пытается «догнать» поле статора. Пока скорость ротора ниже синхронной, каждая частица ротора испытывает обратное магнитное поле с частотой «скольжения», которое вращает ее вокруг своей петли гистерезиса, заставляя поле ротора отставать и создавать крутящий момент. В роторе имеется 2-полюсная конструкция стержня с низким сопротивлением.[5] Когда ротор приближается к синхронной скорости и скольжение достигает нуля, это намагничивается и выравнивается с полем статора, заставляя ротор «блокироваться» с вращающимся полем статора.
Основным преимуществом гистерезисного двигателя является то, что, поскольку угол запаздывания δ не зависит от скорости, он развивает постоянный крутящий момент от запуска до синхронной скорости. Следовательно, он самозапускается и не требует индукционной обмотки для запуска, хотя во многих конструкциях действительно имеется структура проводящей обмотки с короткозамкнутым ротором, встроенная в ротор для обеспечения дополнительного крутящего момента при запуске.[нужна цитата ]
Гистерезисные двигатели производятся с дробной мощностью в лошадиных силах, в основном как серводвигатели и синхронизирующие двигатели. Двигатели с гистерезисом, более дорогие, чем реактивные, используются там, где требуется точная постоянная скорость.[нужна цитата ]
Двигатели с постоянными магнитами
А синхронный двигатель с постоянными магнитами (PMSM) использует постоянные магниты встроен в стальной ротор для создания постоянного магнитного поля. Обмотки статора подключены к источнику переменного тока для создания вращающегося магнитного поля (как в асинхронный двигатель ). При синхронной скорости полюса ротора сцепляются с вращающимся магнитным полем. Синхронные двигатели с постоянными магнитами аналогичны бесщеточные двигатели постоянного тока. Неодимовые магниты являются наиболее часто используемыми магнитами в этих двигателях.
Двигатели с постоянными магнитами используются в качестве безредукторных двигателей для лифтов с 2000 года.[7]
Большинство PMSM требуют частотно-регулируемый привод начать.[8][9][10][11][12] Тем не менее, некоторые включают в себя короткозамкнутую клетку в роторе для запуска - они известны как линейные или самозапускающиеся PMSM.[13] Они обычно используются как более эффективные замены для асинхронных двигателей (из-за отсутствия скольжения), но их необходимо тщательно определять для приложения, чтобы гарантировать достижение синхронной скорости и способность системы выдерживать пульсации крутящего момента во время запуска.
Синхронные двигатели с постоянными магнитами в основном управляются с помощью прямое управление крутящим моментом[14] и полевой контроль[15]. Однако эти методы страдают от относительно высокого крутящего момента и пульсаций магнитного потока статора.[16] Прогностический контроль и контроллеры нейронных сетей недавно были разработаны, чтобы справиться с этими проблемами.[16][17]
Двигатели с возбуждением постоянным током

Обычно эти двигатели изготавливаются более крупных размеров (более 1 лошадиных сил или 1 киловатта), для возбуждения которых требуется постоянный ток (DC), подаваемый на ротор. Это наиболее просто осуществляется через контактные кольца, но бесщеточный Также можно использовать индукцию переменного тока и схему выпрямителя.[18] Постоянный ток может подаваться от отдельного источника постоянного тока или от генератора постоянного тока, непосредственно подключенного к валу двигателя.
Методы контроля
Синхронный двигатель с постоянными магнитами и реактивный двигатель требует наличия системы управления для работы (ЧРП или же сервопривод ).
Существует большое количество методов управления ПМСМ, которые выбираются в зависимости от конструкции электродвигателя и области применения.
Методы контроля можно разделить на:[19]
Синусоидальный
Трапециевидный
- Открытый цикл
- Замкнутый цикл (с и без датчик Холла )
Синхронная скорость
В синхронная скорость синхронного двигателя дается:[20]
в Об / мин, к:

И в рад · с−1, к:

куда:
- это частота переменного тока питания в Гц,
- это количество магнитных полюса.
- - количество пар полюсов (редко, самолеты коммутации), .




Примеры
А отдельная фаза 4-полюсный (2-полюсная пара) синхронный двигатель работает от сети переменного тока с частотой 50 Гц. Количество пар полюсов - 2, поэтому синхронная скорость равна:

А трехфазный 12-полюсный (6-полюсный) синхронный двигатель работает от сети переменного тока с частотой 60 Гц. Количество пар полюсов - 6, поэтому синхронная скорость равна:

Количество магнитных полюсов, , равно количеству катушечных групп на фазу. Чтобы определить количество групп катушек на фазу в трехфазном двигателе, подсчитайте количество катушек, разделите на количество фаз, которое равно 3. Катушки могут занимать несколько пазов в сердечнике статора, что затрудняет их подсчет. . Для трехфазного двигателя, если вы насчитаете в общей сложности 12 групп катушек, он имеет 4 магнитных полюса. Для 12-полюсной 3-фазной машины будет 36 катушек. Количество магнитных полюсов в роторе равно количеству магнитных полюсов в статоре.
Строительство


Основными компонентами синхронного двигателя являются статор и ротор.[21] Статор синхронного двигателя и статор асинхронного двигателя аналогичны по конструкции.[22] С синхронная электрическая машина двойного питания с фазным ротором в виде исключения рама статора содержит обертка.[23] Окружные ребра и панели клавиш прикреплены к пластине обертки.[23] Чтобы выдержать вес машины, рамы крепления и опоры необходимы.[23] Когда обмотка возбуждения возбуждается Возбуждение постоянным током, для подключения к источнику возбуждения требуются щетки и контактные кольца.[24] Обмотка возбуждения также может возбуждаться бесщеточным возбудителем.[25] Цилиндрические круглые роторы (также известные как ротор с невыпадающими полюсами) используются до шести полюсов. В некоторых машинах или когда требуется большое количество полюсов, используется ротор с явнополюсными полюсами.[26][27] Конструкция синхронного двигателя аналогична синхронному. генератор.[28] В большинстве конструкций синхронных двигателей используются стационарный якорь и вращающаяся обмотка возбуждения. Такой тип конструкции как преимущество перед Двигатель постоянного тока Тип, в котором используется якорь вращающегося типа.
Операция

Работа синхронного двигателя происходит за счет взаимодействия магнитных полей статора и ротора. Обмотка статора, состоящая из трехфазной обмотки, имеет трехфазное питание, а ротор - источник постоянного тока. Трехфазная обмотка статора, по которой проходят трехфазные токи, создает трехфазный вращающийся магнитный поток (и, следовательно, вращающееся магнитное поле). Ротор блокируется вращающимся магнитным полем и вращается вместе с ним. Когда поле ротора синхронизируется с вращающимся магнитным полем, говорят, что двигатель синхронизирован. Однофазная (или двухфазная, полученная из однофазной) обмотка статора возможна, но в этом случае направление вращения не определено, и машина может запускаться в любом направлении, если это не предотвращается пусковыми устройствами.[29]
Когда двигатель работает, скорость двигателя зависит только от частоты питания. Когда нагрузка двигателя превышает предельную нагрузку, двигатель теряет синхронизацию, и обмотка возбуждения больше не следует вращающемуся магнитному полю. Поскольку двигатель не может создавать (синхронный) крутящий момент, если он выходит из синхронизации, на практике синхронные двигатели имеют частичную или полную обмотку с короткозамкнутым ротором (амортизатор) для стабилизации работы и облегчения запуска. Поскольку эта обмотка меньше, чем у эквивалентного асинхронного двигателя и может перегреваться при длительной работе, а также из-за того, что в обмотке возбуждения ротора индуцируются большие напряжения с частотой скольжения, устройства защиты синхронного двигателя обнаруживают это состояние и прерывают подачу питания (не в такт защита).[29]
Способы запуска
Синхронные двигатели больше определенного размера не являются самозапускающимися двигателями. Это свойство связано с инерцией ротора; он не может мгновенно следить за вращением магнитного поля статора. Поскольку синхронный двигатель не вырабатывает среднего крутящего момента в состоянии покоя, он не может разогнаться до синхронной скорости без какого-либо дополнительного механизма.[2]
Большие двигатели, работающие на промышленной промышленной частоте, включают в себя индукционную обмотку с короткозамкнутым ротором, которая обеспечивает достаточный крутящий момент для ускорения, а также служит для гашения колебаний скорости двигателя во время работы.[2] Когда ротор приближается к синхронной скорости, возбуждается обмотка возбуждения, и двигатель синхронизируется. Очень большие двигательные системы могут включать в себя "пони" двигатель, который ускоряет ненагруженную синхронную машину до приложения нагрузки.[30][31] Двигатели с электронным управлением могут быть ускорены с нулевой скорости путем изменения частоты тока статора.[32]
Очень маленькие синхронные двигатели обычно используются в электромеханических часах или таймерах с питанием от сети, которые используют частоту сети для работы зубчатого механизма с правильной скоростью. Такие небольшие синхронные двигатели могут запускаться без посторонней помощи, если момент инерции ротора и его механическая нагрузка достаточно мала [потому что двигатель] будет ускоряться от скорости скольжения до синхронной скорости в течение полупериода ускорения реактивного момента ».[2] Отдельная фаза синхронные двигатели, такие как настенные электрические часы, могут свободно вращаться в любом направлении, в отличие от двигателей с расщепленными полюсами. Видеть Синхронный двигатель с расщепленными полюсами для получения согласованного начального направления.
Экономичность эксплуатации является важным параметром при рассмотрении различных методов запуска двигателя.[33] Соответственно, возбуждение ротора - это возможный способ решить проблему запуска двигателя.[34] Кроме того, современные предлагаемые методы пуска для больших синхронных машин включают в себя повторяющееся изменение полярности полюсов ротора во время пуска.[35]
Области применения, особые свойства и преимущества
Использовать как синхронный конденсатор
Изменяя возбуждение синхронного двигателя, он может работать с запаздывающим, опережающим и единичным коэффициентами мощности. Возбуждение, при котором коэффициент мощности равен единице, называется нормальное напряжение возбуждения.[36] Величина тока при таком возбуждении минимальна.[36] Напряжение возбуждения, превышающее нормальное возбуждение, называется повышенным напряжением возбуждения, напряжение возбуждения, меньшее, чем нормальное возбуждение, называется повышенным напряжением возбуждения.[36] Когда двигатель чрезмерно возбужден, противо-ЭДС будет больше, чем напряжение на клеммах двигателя. Это вызывает эффект размагничивания из-за реакции якоря.[37]
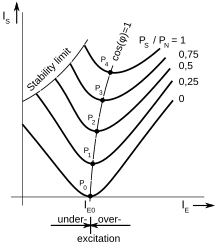
Кривая V синхронной машины показывает ток якоря как функцию тока возбуждения. С увеличением тока возбуждения ток якоря сначала уменьшается, затем достигает минимума, затем увеличивается. Точкой минимума также является точка, при которой коэффициент мощности равен единице.[38]
Эта возможность выборочного управления коэффициентом мощности может быть использована для коррекция коэффициента мощности энергосистемы, к которой подключен двигатель. Поскольку большинство энергосистем любого значительного размера имеют чистый запаздывающий коэффициент мощности, присутствие перевозбужденных синхронных двигателей приближает полезный коэффициент мощности системы к единице, повышая эффективность. Такая коррекция коэффициента мощности обычно является побочным эффектом двигателей, уже присутствующих в системе, для обеспечения механической работы, хотя двигатели могут работать без механической нагрузки просто для обеспечения коррекции коэффициента мощности. На крупных промышленных предприятиях, таких как заводы, взаимодействие между синхронными двигателями и другими отстающими нагрузками может быть явным образом учтено в электрическом проекте предприятия.[нужна цитата ]
Предел устойчивости установившегося состояния

куда,
- крутящий момент
- угол крутящего момента
- это максимальный крутящий момент



здесь,

При приложении нагрузки угол крутящего момента увеличивается. Когда = 90 ° крутящий момент будет максимальным. Если нагрузка приложена и дальше, двигатель потеряет синхронизм, поскольку крутящий момент двигателя будет меньше момента нагрузки.[39][40] Максимальный момент нагрузки, который может быть приложен к двигателю без потери его синхронизма, называется пределом устойчивости синхронного двигателя в установившемся режиме.[39]
Другой
Синхронные двигатели особенно полезны в приложениях, требующих точного управления скоростью и / или положением.
- Скорость не зависит от нагрузки во всем рабочем диапазоне двигателя.
- Скорость и положение можно точно контролировать с помощью элементов управления без обратной связи; например., шаговые двигатели.
- Приложения с низким энергопотреблением включают в себя позиционирующие машины, где требуется высокая точность, и робот приводы.
- Они сохранят свое положение, когда постоянный ток приложен как к статору, так и к обмоткам ротора.
- Часы, приводимые в действие синхронным двигателем, в принципе так же точны, как частота сети его источника питания. (Хотя небольшие отклонения частоты будут происходить в течение любых заданных нескольких часов, операторы сети активно регулируют частоту в сети в более поздние периоды для компенсации, тем самым поддерживая точность тактовых импульсов с приводом от двигателя; Частота потребления # Стабильность.)
- Вертушки проигрывателя пластинок
- Повышенная эффективность в низкоскоростных приложениях (например, шаровые мельницы ).
Подтипы
- Многофазные синхронные двигатели переменного тока
- Шаговый двигатель (может быть синхронным или нет)
- Синхронный бесщеточная электрическая машина с фазным ротором и двойным питанием.
Смотрите также
Рекомендации
- ^ а б c Фитцджеральд, А. Э .; Чарльз Кингсли младший; Александр Куско (1972). «Глава 6, Синхронные машины, установившееся состояние». Электрические машины, 3-е изд.. США: Макгроу-Хилл. С. 283–330. Каталог Библиотеки Конгресса № 70-137126.
- ^ а б c d е Фитцджеральд, А. Э .; Чарльз Кингсли младший; Александр Куско (1971). «Глава 11, раздел 11.2 Характеристики пуска и работы однофазных асинхронных и синхронных двигателей, самозапускающихся реактивных двигателей». Электрические машины, 3-е изд.. США: Макгроу-Хилл. С. 536–538. Каталог Библиотеки Конгресса № 70-137126.
- ^ Джеймс Джи Столлкап, Генератор, трансформатор, двигатель и компрессор Stallcup, стр. 15-13, Jones & Bartlett, 2012 г. ISBN 1-4496-9519-1.
- ^ Уильям Йидон (ред.), Справочник малых электродвигателей, Макгроу-Хилл 2001 ISBN 0-07-072332-X, Глава 12 «Синхронные машины»
- ^ а б c Готтлиб, Ирвинг М. (1997). Практическое руководство по электродвигателю, 2-е изд.. США: Ньюнес. С. 73–76. ISBN 978-0-7506-3638-4.
- ^ Майкл А. Лотон (2003), «19.2.5 Двигатели с сопротивлением», Справочник инженера-электрика, Newnes, стр. 19/8, ISBN 978-0-7506-4637-6
- ^ Мери, Дариус (18 сентября 2000 г.). «Ремни подъемные рабочие». DesignNews.com. Архивировано из оригинал 29 июня 2013 г.. Получено 10 мая 2016.
- ^ Р. Ислам; И. Хусейн; А. Фардун; К. Маклафлин.«Конструкции магнитов синхронного двигателя с постоянным магнитом с перекосом для пульсации крутящего момента и уменьшения крутящего момента зазубрины».Промышленные приложения, транзакции IEEE на 2009 год.Дои: 10.1109 / TIA.2008.2009653
- ^ Ки-Чан Ким; Сеунг-Бин Лим; Дэ-Хён Ку; Джу Ли.Конструкция формы постоянного магнита для синхронного двигателя с постоянным магнитом с учетом частичного размагничивания ».Magnetics, IEEE Transactions на 2006 год.Дои: 10.1109 / TMAG.2006.879077
- ^ П. Пиллэй; Р. Кришнан.«Характеристики применения синхронных и бесщеточных двигателей постоянного тока с постоянными магнитами для сервоприводов».Промышленные приложения, транзакции IEEE на 1991 год.Дои: 10.1109/28.90357 Цитата: «Синхронный двигатель с постоянными магнитами (PMSM) и бесщеточный двигатель постоянного тока (BDCM) имеют много общего; они оба имеют постоянные магниты на роторе и требуют переменного тока статора для создания постоянного крутящего момента».
- ^ Ю. Хонда; Т. Накамура; Т. Хигаки; Ю. Такеда.«Соображения по конструкции двигателя и результаты испытаний синхронного двигателя с внутренним постоянным магнитом для электромобилей» Конференция по промышленным приложениям, 1997 г. Тридцать второе ежегодное собрание IAS, IAS '97., Протокол конференции IEEE 1997 г., 1997 г.Дои: 10.1109 / IAS.1997.643011
- ^ М.А. Рахман; Пинг Чжоу.«Анализ бесщеточных синхронных двигателей с постоянными магнитами» Промышленная электроника, IEEE Transactions на 1996 год.Дои: 10.1109/41.491349
- ^ Хассанпур Исфахани, Араш; Ваез-Заде, Садех (ноябрь 2009 г.). «Линейные синхронные двигатели с постоянными магнитами: проблемы и возможности». Энергия. 34 (11): 1755–1763. Дои:10.1016 / j.energy.2009.04.022.
- ^ Suman, K .; Suneeta, K .; Сасикала, М. (09.09.2020). Асинхронный привод с прямым управлением крутящим моментом с пространственно-векторной модуляцией, питаемый от трехуровневого инвертора. Публикация конференции IEEE. С. 1–6. Дои:10.1109 / PEDES.2012.6484405. ISBN 978-1-4673-4508-8. S2CID 25556839. Получено 2020-09-23.
- ^ Ван, Чжэн; Чен, Цзянь; Ченг, Мин; Чау, К. Т. (09.09.2020). «Полевое управление и прямое управление крутящим моментом для приводов PMSM с питанием от параллельных VSI с переменной частотой переключения». IEEE Transactions по силовой электронике. 31 (3): 2417–2428. Дои:10.1109 / TPEL.2015.2437893. S2CID 19377123. Получено 2020-09-23.
- ^ а б Никбахт, Масуд; Лиаси, Саханд Гасеминеджад; Аббасзаде, Карим; Маркаде, Голамреза Араб (09.09.2020). Стратегия прогнозируемого управления с улучшенной моделью для управления PMSM с уменьшенными пульсациями крутящего момента и магнитного потока. Публикация конференции IEEE. С. 1–6. Дои:10.1109 / PEDSTC49159.2020.9088489. ISBN 978-1-7281-5849-5. S2CID 218564540. Получено 2020-09-23.
- ^ Кумар, Раджеш; Gupta, R.A .; Бансал, Аджай Кр. (09.09.2020). Идентификация и контроль PMSM с помощью искусственной нейронной сети. Публикация конференции IEEE. С. 30–35. Дои:10.1109 / ISIE.2007.4374567. ISBN 978-1-4244-0754-5. S2CID 35896251. Получено 2020-09-23.
- ^ ОН. Иордания, Энергоэффективные электродвигатели и их применение, стр. 104, Springer, 1994 г. ISBN 0-306-44698-7
- ^ «Синхронный двигатель с постоянным магнитом». en.engineering-solutions.ru. Получено 2019-07-02.
- ^ «Скорость двигателя». Ящик для инструментов электрика и т. Д. Архивировано с оригинал на 1999-05-08.
- ^ «Электрическая машина». Университет Альберты.
- ^ Финни, Дэвид (1988). Система привода электродвигателя переменного тока с переменной частотой. B (переиздание 1991 г.). Питер Перегринус, ООО стр. 33. ISBN 978-0-86341-114-4.
- ^ а б c Исидор Керсенбаум, Джефф Клемпнер (2011-09-20). Справочник по эксплуатации и обслуживанию больших турбогенераторов (Второе изд.). Вайли. ISBN 9781118210406.
- ^ Джеральд Б. Климан, Хамид А. Тольят (2018-10-03). Справочник по электродвигателям (Второе изд.). п. 302. ISBN 9781420030389.
- ^ Джордан, Ховард Э. (31.08.1994). Энергоэффективные электродвигатели и их применение. B (Второе изд.). Пленум пресс. п. 104. ISBN 978-0-306-44698-6.
- ^ Тераджа, Б. (2005). Электротехника. II (переиздание 2010 г.). С. Чанд. п. 1404. ISBN 978-81-219-2437-5.
- ^ Исидор Керсенбаум, Джефф Клемпнер (2011-09-20). Справочник по эксплуатации и обслуживанию больших турбогенераторов (Второе изд.). Вайли. ISBN 9781118210406.
- ^ Тераджа, Б. (2005). Электротехника. II (переиздание 2010 г.). С. Чанд. п. 1490. ISBN 978-81-219-2437-5.
- ^ а б Стандарт IEEE 141-1993 Рекомендуемая практика распределения электроэнергии на промышленных предприятиях страницы 227-230
- ^ Джерри К.Уитакер, Справочник по системам питания переменного тока, стр. 192, CRC Press, 2007 ISBN 0-8493-4034-9.
- ^ Леду, Курт; Visser, Paul W .; Хулин, Дж. Дуайт; Нгуен, Хиен (май 2015 г.). «Запуск больших синхронных двигателей в слабых энергосистемах». IEEE Transactions по отраслевым приложениям. 51 (3): 2676–2682. Дои:10.1109 / tia.2014.2373820. ISSN 0093-9994.
- ^ Дэвид Финни, Система привода электродвигателя переменного тока с переменной частотой, стр. 32, IEE, 1988 г. ISBN 0-86341-114-2.
- ^ Nevelsteen, J .; Арагон, Х. (1989). «Пуск больших двигателей - методы и экономика». IEEE Transactions по отраслевым приложениям. 25 (6): 1012–1018. Дои:10.1109/28.44236. ISSN 0093-9994.
- ^ Шефер, Р. (1999). «Управление возбуждением синхронного двигателя». IEEE Transactions по отраслевым приложениям. 35 (3): 694–702. Дои:10.1109/28.767025. ISSN 0093-9994.
- ^ Perez-Loya, J. J .; Abrahamsson, C.J.D .; Эвестедт, Фредрик; Лундин, Урбан (2017). «Демонстрация запуска синхронного двигателя инверсией полярности ротора». IEEE Transactions по промышленной электронике. 65 (10): 8271–8273. Дои:10.1109 / tie.2017.2784342. ISSN 0278-0046. S2CID 46936078.
- ^ а б c Бхаттачарья, С. К. (27 августа 2008 г.). Электрические машины (третье изд.). Тата - МакГроу Хилл. п. 481. ISBN 9780070669215. OCLC 808866911.
- ^ Косов, Ирвинг Л. (сентябрь 2007 г.). Электрические машины и трансформаторы (второе изд.). Pearson Education. п. 230. ISBN 9788131711279. OCLC 222453.
- ^ Тераджа, Б.Л .; Тераджа, А. К. Электротехника. II (переиздание 2010 г.). С Чанд. п. 1524.
- ^ а б Дубей, Г. К. Основы электроприводов. Нароса, издательство ченнаи. п. 254.
- ^ Пиллаи, С. К. Первый курс по электрическим приводам (второе изд.). Новый век интернэшнл. п. 25.