Робот - Robot



А робот это машина - особенно один программируемый компьютер - способен автоматически выполнять сложную серию действий.[2] Роботами можно управлять с помощью внешнего устройства управления или контроль могут быть встроены в. Роботы могут быть сконструированы по образцу человека, но большинство роботов - это машины, предназначенные для выполнения определенных задач безотносительно к их эстетике.
Роботы могут быть автономный или полуавтономные и варьируются от гуманоидов, таких как Honda с Продвинутый шаг в инновационной мобильности (ASIMO ) и ТОСИ с Робот для игры в пинг-понг TOSY (ТОПИО ) к промышленные роботы, медицинские операционные роботы, роботы-помощники для пациентов, роботы-терапевты для собак, совместно запрограммированные роиться роботы, Беспилотные летательные аппараты Такие как General Atomics MQ-1 Хищник и даже микроскопические нано роботы. Имитируя реалистичный внешний вид или автоматизируя движения, робот может передать чувство интеллекта или мысль собственное. Автономные вещи ожидается, что в ближайшее десятилетие их количество увеличится,[3] с домашней робототехникой и автономный автомобиль как некоторые из основных драйверов.[4]
Филиал технологии что касается проектирования, строительства, эксплуатации и применения роботов,[5] а также компьютерные системы для их контроля, сенсорной обратной связи и обработка информации является робототехника. Эти технологии имеют дело с автоматизированными машинами, которые могут заменить людей в опасных средах или процессы изготовления, или напоминают людей по внешнему виду, поведению или познанию. Многие современные роботы вдохновлены природой и вносят свой вклад в сферу био-вдохновленная робототехника. Эти роботы также создали новую отрасль робототехники: мягкая робототехника.
С момента древняя цивилизация было много учетных записей настраиваемых пользователем автоматических устройств и даже автоматы напоминающие животных и людей, предназначенные в первую очередь для развлечения. Поскольку механические методы развивались благодаря Индустриальный век появились более практичные приложения, такие как автоматизированные машины, дистанционное управление и беспроводная связь. дистанционное управление.
Термин происходит от славянского корня, робот, со значениями, связанными с трудом. Слово «робот» впервые было использовано для обозначения вымышленного гуманоида в 1920 году. Чешский язык играть в R.U.R. (Rossumovi Univerzální Roboti - Универсальные роботы Россум) к Карел Чапек, хотя это был брат Карела Йозеф Чапек кто был настоящим изобретателем слова.[6][7][8] Электроника превратилась в движущую силу развития с появлением первых электронных автономных роботов, созданных Уильям Грей Уолтер в Бристоль, Англия в 1948 г., а также Компьютерное числовое управление (ЧПУ) станки в конце 1940-х годов Джон Т. Парсонс и Фрэнк Л. Стулен. Первый коммерческий, цифровой и программируемый робот был построен Джордж Девол в 1954 году и был назван Unimate. Он был продан Дженерал Моторс в 1961 году, когда он использовался для подъема кусков горячего металла из литье под давлением машины на Завод рыболовных гидов во внутренних водах в West Trenton раздел Юинг Тауншип, Нью-Джерси.[9]
Роботы заменили людей[10] при выполнении повторяющихся и опасных задач, которые люди предпочитают не выполнять или не могут выполнять из-за ограничений по размеру, или которые выполняются в экстремальных условиях, таких как космическое пространство или дно моря. Есть опасения по поводу все более широкого использования роботов и их роли в обществе. Роботов обвиняют в росте технологическая безработица поскольку они заменяют рабочих во все большем количестве функций.[11] Использование роботов в боевых действиях вызывает этические проблемы. Возможности автономности роботов и возможные последствия обсуждались в художественной литературе и могут стать реальной проблемой в будущем.
Резюме


Слово робот может относиться как к физическим роботам, так и виртуальный программные агенты, но последние обычно называют боты.[12] Нет единого мнения о том, какие машины можно отнести к роботам, но среди экспертов и общественности существует общее мнение, что роботы, как правило, обладают некоторыми или всеми из следующих способностей и функций: принятие электронного программирования, обработка данных или физическое восприятие электронно, до некоторой степени работать автономно, перемещаться, управлять своими физическими частями или физическими процессами, ощущать и манипулировать окружающей средой, а также проявлять разумное поведение, особенно поведение, которое имитирует людей или других животных.[13][14] Тесно связан с концепцией робот это область Синтетическая биология, который изучает сущности, природа которых более сопоставима с существа чем к машинам.
История
Идея автоматов зародилась в мифологиях многих культур по всему миру. Инженеры и изобретатели из древних цивилизаций, в том числе Древний Китай,[15] Древняя Греция, и Птолемеевский Египет,[16] пытался построить самоуправляемые машины, некоторые из которых напоминали животных и людей. Ранние описания автоматов включают искусственных голубей Archytas,[17] искусственные птицы Mozi и Лу Бань,[18] "говорящий" автомат Герой Александрии, автомат для умывальника Филон Византийский, и человеческий автомат, описанный в Ли Цзы.[15]
Раннее начало
Многие древние мифологии и большинство современных религий включают искусственных людей, таких как механические слуги, построенные греческим богом. Гефест[19] (Вулкан к римлянам), глина големы из еврейских легенд и глиняных гигантов из скандинавских легенд, и Галатея, мифическая статуя Пигмалион это ожило. Примерно с 400 г. до н.э. мифы о Крит включают Талос, бронзовый человек, охранявший остров от пиратов.
В Древней Греции греческий инженер Ктесибий (ок. 270 г. до н.э.) «применил знания пневматики и гидравлики для создания первых органов и водяных часов с движущимися фигурами».[20][21] В 4 веке до нашей эры Греческий математик Archytas из Тарента постулировал механическую птицу, приводимую в действие паром, которую он назвал «Голубь». Герой Александрии (10–70 гг. Н.э.), греческий математик и изобретатель, создал множество настраиваемых пользователем автоматических устройств и описал машины, работающие от давления воздуха, пара и воды.[22]
Локапаннатти XI века рассказывает о том, как мощи Будды были защищены механическими роботами (бхута вахана янта) из царства Рома вишая (Рим); пока они не были разоружены королем Ашока. [23] [24]
В древнем Китае текст III века Ли Цзы описывает рассказ о гуманоидных автоматах, включающий гораздо более раннюю встречу между китайским императором Король Му Чжоу и инженер-механик, известный как Ян Ши, «ремесленник». Янь Ши с гордостью подарил королю человеческую фигуру в натуральную величину, созданную его механической «работой» из кожи, дерева и искусственных органов.[15] Есть также сообщения о летающих автоматах в Хан Фэй Цзы и другие тексты, которые относят V век до нашей эры. Мохист философ Mozi и его современник Лу Бань с изобретением искусственных деревянных птиц (ма юань), который мог успешно летать.[18]
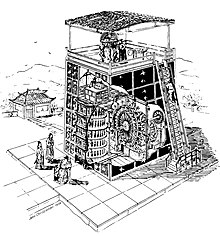
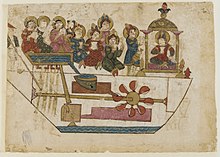
В 1066 году китайский изобретатель Су Сон построил водяные часы в виде башни с механическими фигурками, отбивающими часы.[25][26][27] Его механизм имел программируемую драм-машину с колышками (кулачки ) который натолкнулся на рычаги которые работали на ударных инструментах. Барабанщика можно было заставить играть разные ритмы и разные паттерны ударных, перемещая колышки в разные места.[27]
Самарангана Сутрадхара, а санскрит трактат Бходжа (11 век), включает главу о конструкции механических приспособлений (автоматы ), включая механических пчел и птиц, фонтаны в форме людей и животных, а также куклы мужского и женского пола, которые заполняют масляные лампы, танцуют, играют на инструментах и воспроизводят сцены из индуистской мифологии.[28][29][30]
13 век Мусульманский ученый Исмаил аль-Джазари создал несколько автоматизированных устройств. Он построил автоматических движущихся павлинов, приводимых в движение гидроэнергетикой.[31] Он также изобрел самые ранние известные автоматические ворота, которые приводились в движение гидроэнергетикой.[32] создал автоматические двери как часть одного из его тщательно продуманных водяные часы.[33] Один из аль-Джазари гуманоидные автоматы была официанткой, которая могла подавать воду, чай или напитки. Напиток хранился в емкости с резервуаром, откуда напиток капал в ведро, а через семь минут - в чашку, после чего из автоматической дверцы показывалась официантка, разносящая напиток.[34] Аль-Джазари изобрел мытье рук автомат включая механизм смыва, который сейчас используется в современных сливные туалеты. Он имеет женский гуманоидный автомат стоя у таза, наполненного водой. Когда пользователь нажимает на рычаг, вода стекает, и женский автомат наполняет таз.[35]
Марк Э. Росхайм резюмирует достижения в робототехника сделано мусульманскими инженерами, особенно аль-Джазари, следующим образом:
В отличие от греческих образцов, эти арабские образцы демонстрируют интерес не только к драматическим иллюзиям, но и к манипулированию окружающей средой для удобства человека. Таким образом, самым большим вкладом арабов, помимо сохранения, распространения и развития работы греков, была концепция практического применения. Это был ключевой элемент, которого не хватало греческой робототехнике.[36]

В эпоха Возрождения Италия, Леонардо да Винчи (1452–1519) набросал планы робота-гуманоида примерно в 1495 году. В записных книжках да Винчи, вновь открытых в 1950-х годах, содержались подробные рисунки механического рыцаря, известного теперь как Робот Леонардо, может сидеть, махать руками и двигать головой и челюстью.[38] Дизайн, вероятно, был основан на анатомических исследованиях, записанных в его Витрувианский человек. Неизвестно, пытался ли он его построить. В соответствии с Британская энциклопедия, Леонардо да Винчи возможно, находился под влиянием классических автоматов аль-Джазари.[31]
В Японии сложные животные и человеческие автоматы были построены в период с 17 по 19 века, многие из них были описаны в 18 веке. Каракури дзуи (Иллюстрированное оборудование, 1796). Одним из таких автоматов был каракури нингё, механизированный кукольный.[39] Существовали различные вариации каракури: Бутай каракури, которые использовались в театр, то Дзасики каракури, которые были небольшими и использовались в домах, а Даши каракури которые использовались на религиозных праздниках, где куклы использовались для воспроизведения традиционных мифы и легенды.
Во Франции между 1738 и 1739 годами Жак де Вокансон выставили несколько автоматов в натуральную величину: флейтист, трубач и утка. Механическая утка могла махать крыльями, вытягивать шею и глотать пищу из руки экспонента, и это создавало иллюзию переваривания пищи, выделяя материю, хранящуюся в скрытом отсеке.[40]
Системы дистанционного управления
Дистанционно управляемые автомобили были продемонстрированы в конце 19 века в виде нескольких типов дистанционно управляемых автомобилей. торпеды. В начале 1870-х годов пила с дистанционным управлением. торпеды к Джон Эрикссон (пневматический ), Джон Луи Лэй (с направлением электрического провода), и Виктор фон Шелиха (электрический провод направлен).[41]
В Торпеда Бреннана, изобретенный Луи Бреннан в 1877 г. приводился в действие двумя винтами противоположного вращения, которые вращались путем быстрого выдергивания проводов из барабанов, намотанных внутри торпеда. Разница скорости на проводах, соединенных с береговой станцией, позволила навести торпеду на цель, что сделало ее «первой в мире». практичный управляемая ракета".[42] В 1897 г. британскому изобретателю Эрнесту Уилсону был выдан патент на торпеду, дистанционно управляемую «герциевскими» (радиоволнами).[43][44] и в 1898 г. Никола Тесла публично продемонстрировал беспроводной управляемый торпеда что он надеялся продать ВМС США.[45][46]
Арчибальд Лоу, известный как "отец систем радионаведения" за его новаторские работы по управляемым ракетам и самолетам во время Первая мировая война. В 1917 году он продемонстрировал самолет с дистанционным управлением. Королевский летающий корпус и в том же году построил первую ракету с проволочным наведением.
Происхождение термина «робот»
Термин «робот» впервые был использован для обозначения искусственных автоматов в пьесе 1920 года. R.U.R. посредством Чешский писатель Карел Чапек. Тем не мение, Йозеф Чапек был назван его братом Карелом как истинный изобретатель термина «робот».[7][8] Само слово «робот» не было новым, так как в славянском языке оно употреблялось как робот (подневольный рабочий), термин, который относил крестьян, обязанных к обязательной службе, к категории феодальный система (см .: Патент на робот ).[47][48]Художественная история Чапека постулировала технологическое создание искусственных человеческих тел без души, а старая тема феодальной робот класс красноречиво соответствовал воображению нового класса искусственно созданных рабочих.
Английское произношение этого слова эволюционировало относительно быстро с момента его появления. В США в конце 30-х - начале 40-х годов второй слог произносился с длинной буквы «О», как «гребная лодка».[49][нужен лучший источник ] К концу 50-х - началу 60-х некоторые произносили его с короткой «U», как «row-but», в то время как другие использовали более мягкую «O», например, «row-buy».[50] К 70-м годам преобладающим стало его нынешнее произношение «гребешок».
Ранние роботы

В 1928 году один из первых человекоподобных роботов, Эрик, экспонировалась на ежегодной выставке Общества модельных инженеров в г. Лондон, где он выступил с речью. Рама робота, изобретенная У. Х. Ричардсом, состояла из алюминий бронежилет с одиннадцатью электромагниты и один двигатель, работающий от источника питания на двенадцать вольт. Робот мог двигать руками и головой, им можно было управлять с помощью пульта дистанционного управления или голосового управления.[51] И Эрик, и его «брат» Джордж гастролировали по миру.[52]
Westinghouse Electric Corporation построил Televox в 1926 году; это был картонный вырез, подключенный к различным устройствам, которые пользователи могли включать и выключать. В 1939 году робот-гуманоид, известный как Электро дебютировал на 1939 Нью-Йоркская всемирная выставка.[53][54] Семь футов (2,1 м) и вес 265 фунтов (120,2 кг), он мог ходить с помощью голосовых команд, говорить около 700 слов (используя 78 оборотов в минуту). магнитофон ), курит сигареты, надувает воздушные шары и двигает головой и руками. Кузов состоял из стальной шестерни, кулачка и моторного каркаса, покрытого алюминиевой обшивкой. В 1928 году первый робот Японии, Гакутэнсоку, был спроектирован и построен биологом Макото Нисимура.
Современные автономные роботы
Первые электронные автономные роботы со сложным поведением были созданы Уильям Грей Уолтер из Институт неврологии бремени в Бристоль, Англия в 1948 и 1949 годах. Он хотел доказать, что богатые связи между небольшим числом клетки мозга может привести к очень сложным поведение - по сути, секрет того, как работает мозг, заключается в том, как он устроен. Его первые роботы, названные Элмер и Элси, были построены между 1948 и 1949 годами и часто описывались как черепахи из-за их формы и медленной скорости движения. Трехколесные роботы-черепахи были способны фототаксис, с помощью которой они могли найти путь к зарядной станции, когда у них разряжен заряд батареи.
Уолтер подчеркнул важность использования чисто аналог электроника для моделировать мозговые процессы в то время, когда его современники, такие как Алан Тьюринг и Джон фон Нейман все обращались к взглядам на психические процессы с точки зрения цифровой вычисление. Его работа вдохновила последующие поколения исследователей робототехники, таких как Родни Брукс, Ганс Моравец и Марк Тилден. Современные воплощения Уолтера черепахи можно найти в виде BEAM робототехника.[55]

Первый программируемый робот с цифровым управлением был изобретен Джордж Девол в 1954 году и в конечном итоге был назван Unimate. Это в конечном итоге заложило основы современной индустрии робототехники.[56] Девол продал первый Unimate Дженерал Моторс в 1960 г., а установлен в 1961 г. на заводе в г. Трентон, Нью-Джерси поднимать горячие куски металла из литье под давлением машину и сложите их.[57] Патент Девола на первую программируемую роботизированную руку с цифровым управлением представляет собой основу современной индустрии робототехники.[58]
Первый робот-палетоукладчик был представлен в 1963 году компанией Fuji Yusoki Kogyo.[59] В 1973 году был запатентован робот с шестью осями с электромеханическим приводом.[60][61][62] к KUKA робототехника в Германии и программируемый универсальный манипулятор был изобретен Виктор Шейнман в 1976 году, и дизайн был продан Unimation.
В настоящее время широко используются коммерческие и промышленные роботы, выполняющие работу дешевле или с большей точностью и надежностью, чем люди. Они также используются для работы, которая слишком грязная, опасная или унылая, чтобы подходить для людей. Роботы широко используются в производстве, сборке и упаковке, транспорте, исследовании земли и космоса, хирургии, вооружении, лабораторных исследованиях и массовом производстве потребительских и промышленных товаров.[63]
Будущее развитие и тенденции
| Внешнее видео | |
|---|---|
Появились различные методы развития науки о робототехнике и роботах. Один из способов - эволюционная робототехника, в котором на испытания проходят несколько разных роботов. Те, которые работают лучше всего, используются в качестве модели для создания следующего «поколения» роботов. Другой метод - развивающая робототехника, который отслеживает изменения и развитие в рамках одного робота в области решения проблем и других функций. Совсем недавно был представлен еще один новый тип роботов, который действует как смартфон и робот, и называется RoboHon.[64]
По мере того, как роботы становятся более продвинутыми, со временем может появиться стандартная компьютерная операционная система, предназначенная в основном для роботов. Операционная система робота представляет собой набор программ с открытым исходным кодом, разрабатываемых в Стэндфордский Университет, то Массачусетский Институт Технологий и Технический университет Мюнхена, Германия и другие. ROS предоставляет способы программирования навигация робота и конечности независимо от конкретного оборудования. Он также предоставляет команды высокого уровня для таких элементов, как распознавание изображений и даже открывающиеся двери. Когда ROS загружается на компьютер робота, он получает данные об атрибутах, таких как длина и движение конечностей роботов. Он будет передавать эти данные в алгоритмы более высокого уровня. Microsoft также разрабатывает систему «Windows для роботов» с помощью Robotics Developer Studio, доступной с 2007 года.[65]
Япония надеется на полномасштабную коммерциализацию сервисных роботов к 2025 году. Многие технологические исследования в Японии проводятся под руководством японских правительственных агентств, в частности Министерства торговли.[66]
Многие будущие приложения робототехники кажутся людям очевидными, хотя они намного превосходят возможности роботов, доступных на момент прогнозирования.[67][68] Еще в 1982 году люди были уверены, что когда-нибудь роботы:[69] 1. Очистите детали, сняв формование флэш 2. Распылите краску на автомобили без присутствия людей 3. Упакуйте вещи в коробки - например, раскройте шоколадные конфеты и поместите их в коробки для конфет 4. Сделайте электрические жгут 5. Загружать грузовики ящиками - a проблема упаковки 6. Обращайтесь с мягкими товарами, такими как одежда и обувь. 7. Стригите овец 8. протез 9. Готовить фаст-фуд и работать в других сферах услуг 10. Бытовой робот.
Обычно такие прогнозы излишне оптимистичны по срокам.
Новые функции и прототипы
В 2008, Компания Caterpillar Inc. разработали самосвал, который может двигаться самостоятельно без участия человека.[70] Многие аналитики считают, что беспилотные грузовики со временем могут произвести революцию в логистике.[71] К 2014 году у Caterpillar появился самосвал с автоматическим управлением, который, как ожидается, существенно изменит процесс добычи полезных ископаемых. В 2015 году эти самосвалы Caterpillar активно использовались горнодобывающей компанией в Австралии на горных работах. Рио Тинто Уголь Австралия.[72][73][74][75] Некоторые аналитики полагают, что в ближайшие несколько десятилетий большинство грузовиков будет самоуправляемым.[76]
Грамотный или «читающий робот» по имени Мардж обладает интеллектом, который исходит от программного обеспечения. Она может читать газеты, находить и исправлять слова с ошибками, узнавать о банках, таких как Barclays, и понимать, что одни рестораны лучше, чем другие.[77]
Бакстер - это новый робот, представленный в 2012 году, который обучается под руководством. Рабочий может научить Бакстера выполнять задание, двигая руками в желаемом направлении и запоминая их. На руке Baxter имеются дополнительные циферблаты, кнопки и элементы управления для большей точности и функциональности. Любой штатный работник может запрограммировать Бакстера, и это займет всего несколько минут, в отличие от обычных промышленных роботов, которые требуют обширных программ и кодирования для использования. Это означает, что Baxter не нуждается в программировании для работы. Никаких программистов не требуется. Это также означает, что Бакстера можно научить выполнять несколько более сложных задач. Sawyer был добавлен в 2015 году для более мелких и точных задач.[78]
Этимология

Слово робот был представлен публике Чешский межвоенный писатель Карел Чапек в его игре R.U.R. (Универсальные роботы Россум), опубликовано в 1920 году.[79] Игра начинается на фабрике, которая использует химический заменитель протоплазмы для производства живых упрощенных людей, называемых роботы. В пьесе не говорится подробно о технологиях, лежащих в основе создания этих живых существ, но по своему внешнему виду они прообразают современные идеи андроиды, существа, которых можно принять за людей. Эти массовые рабочие изображаются эффективными, но бесчувственными, неспособными к оригинальному мышлению и равнодушными к самосохранению. Вопрос в том, работают ли роботы эксплуатируемый и последствия человеческой зависимости от коммодифицированного труда (особенно после того, как ряд специально разработанных роботов достигли самосознания и побудили роботов по всему миру восстать против людей).
Сам Карел Чапек это слово не придумал. Он написал короткое письмо со ссылкой на этимология в Оксфордский словарь английского языка в котором он назвал своего брата, художника и писателя Йозеф Чапек, как его фактический создатель.[79]
В статье в чешском журнале Lidové noviny в 1933 году он объяснил, что изначально хотел назвать этих существ Laboři ("рабочие", от латинский труд). Однако ему не понравилось это слово, и он попросил совета у своего брата Йозефа, который предложил «роботи». Слово робот буквально означает "барщинный "," крепостной труд ", и, образно говоря," тяжелая работа "или" тяжелая работа "в Чешский а также (более общий) "работа", "труд" во многих Славянские языки (например.: болгарский, русский, сербский, словацкий, Польский, македонский, украинец, архаичный Чешский, а также робот в Венгерский ). Традиционно робот (Венгерский робот) был период работы крепостным (барщинный ) должен был отдавать за своего господина, как правило, 6 месяцев в году. Происхождение слова - это Старославянский (Староболгарский ) работа "сервитут" ("работа" в современном болгарский и русский ), которое, в свою очередь, происходит от Протоиндоевропейский корень * orbh-. Робот является родственный с немецким корнем Arbeit (работай).[80][81]
Слово робототехника, используется для описания этой области исследования,[5] был придуман писателем-фантастом Айзек Азимов. Азимов создал "Три закона робототехники ", которые являются постоянной темой в его книгах. С тех пор они использовались многими другими для определения законов, используемых в художественной литературе. (Три закона - чистая выдумка, и ни одна из созданных технологий не способна понять их или следовать им, и фактически большинство роботов служат в военных целях, что совершенно противоречит первому закону, а часто и третьему закону ». Люди думают о законах Азимова, но они были созданы, чтобы указать, как простая этическая система не работает. рассказы, каждая из которых посвящена неудаче, и они абсолютно непрактичны », - сказала д-р Джоанна Брайсон из Университета Бата.[82])
Современные роботы

Мобильный робот
Мобильные роботы[83] имеют возможность перемещаться в своей среде и не привязаны к одному физическому местоположению. Примером мобильного робота, который сегодня широко используется, является автоматизированная управляемая машина или же машина с автоматическим управлением (AGV). AGV - это мобильный робот, который следует по маркерам или проводам на полу, использует видение или лазеры.[84] AGV обсуждаются позже в этой статье.
Мобильные роботы также используются в промышленности, в военной сфере и в сфере безопасности.[85] Они также появляются как потребительские товары, для развлечения или для выполнения определенных задач, таких как уборка пылесосом. Мобильные роботы являются предметом большого количества текущих исследований, и почти в каждом крупном университете есть одна или несколько лабораторий, которые специализируются на исследованиях мобильных роботов.[86]
Мобильные роботы обычно используются в жестко контролируемой среде, например на сборочные линии потому что им трудно реагировать на неожиданные помехи. Из-за этого большинство людей редко сталкивается с роботами. тем не мение домашние роботы для уборки и обслуживания все чаще встречаются в домах и вокруг них в развитых странах. Роботов также можно найти в военный Приложения.[87]
Промышленные роботы (манипуляторы)

Промышленные роботы обычно состоят из шарнирная рука (многосвязный манипулятор) и рабочий орган который прикреплен к неподвижной поверхности. Одним из наиболее распространенных типов концевых эффекторов является захват сборка.
В Международная организация по стандартизации дает определение управляющего промышленного робота в ISO 8373:
«Автоматически управляемый, перепрограммируемый, многоцелевой манипулятор, программируемый по трем или более осям, который может быть либо фиксированным на месте, либо мобильным для использования в приложениях промышленной автоматизации».[88]
Это определение используется Международная федерация робототехники, Европейская сеть исследований робототехники (EURON) и многие национальные комитеты по стандартам.[89]
Сервисный робот
Чаще всего промышленные роботы представляют собой стационарные роботизированные манипуляторы и манипуляторы, используемые в основном для производства и распределения товаров. Термин «сервисный робот» имеет менее четкое определение. В Международная федерация робототехники предложил предварительное определение: «Сервисный робот - это робот, который работает частично или полностью автономно для оказания услуг, полезных для благополучия людей и оборудования, за исключением производственных операций».[90]
Обучающие (интерактивные) роботы
Роботы используются в качестве помощников учителей. С 1980-х годов такие роботы, как черепахи использовались в школах и программировались с помощью Логотип язык.[91][92]
Есть комплекты роботов подобно Лего Mindstorms, БИОЛОИД, OLLO от ROBOTIS или Обучающие роботы BotBrain могут помочь детям узнать о математике, физике, программировании и электронике. Робототехника также вошла в жизнь учеников начальной и средней школы в виде соревнования роботов с компанией ПЕРВЫЙ (За вдохновение и признание науки и техники). Организация - основа для ПЕРВЫЙ конкурс робототехники, ПЕРВАЯ ЛЕГО Лига, Юная ПЕРВАЯ ЛЕГО Лига, и FIRST Tech Challenge соревнования.
Были также роботы, такие как обучающий компьютер Leachim (1974).[93] Личим был одним из первых примеров синтеза речи с использованием Дифонный синтез метод. 2-XL (1976) была игра / обучающая игрушка в форме робота, основанная на переходе между звуковыми дорожками на 8-дорожечная лента игрок, оба изобретены Майкл Дж. Фриман.[94] Позже 8-дорожечная версия была преобразована в кассеты с магнитной лентой, а затем в цифровую.
Модульный робот
Модульные роботы - это новое поколение роботов, которые предназначены для увеличения использования роботов за счет модульного построения их архитектуры.[95] Функциональность и эффективность модульного робота легче повысить по сравнению с обычными роботами. Эти роботы состоят из одного типа идентичных, нескольких разных одинаковых типов модулей или модулей схожей формы, которые различаются по размеру. Их архитектурная структура допускает гипер-избыточность для модульных роботов, поскольку они могут иметь более 8 степеней свободы (DOF). Создание программирования, обратная кинематика а динамика для модульных роботов более сложна, чем у традиционных роботов. Модульные роботы могут состоять из L-образных модулей, кубических модулей, а также U- и H-образных модулей. Технология ANAT, ранняя модульная роботизированная технология, запатентованная Robotics Design Inc., позволяет создавать модульные роботы из U- и H-образных модулей, которые соединяются в цепочку и используются для формирования гетерогенных и однородных модульных робототехнических систем. Эти «роботы ANAT» могут быть спроектированы с «n» степенями свободы, поскольку каждый модуль представляет собой законченную моторизованную роботизированную систему, которая складывается относительно модулей, соединенных до и после него в своей цепочке, и, следовательно, один модуль допускает одну степень свободы. Чем больше модулей подключено друг к другу, тем больше у него будет степеней свободы. L-образные модули также могут быть спроектированы в виде цепочки, и они должны становиться все меньше по мере увеличения размера цепи, поскольку полезные нагрузки, прикрепленные к концу цепи, создают большую нагрузку на модули, расположенные дальше от основания. H-образные модули ANAT не страдают от этой проблемы, поскольку их конструкция позволяет модульному роботу равномерно распределять давление и удары между другими присоединенными модулями, и, следовательно, грузоподъемность не уменьшается с увеличением длины руки. Модульные роботы можно перенастроить вручную или самостоятельно, чтобы сформировать другого робота, который может выполнять разные приложения. Поскольку модульные роботы одного и того же типа архитектуры состоят из модулей, составляющих разных модульных роботов, робот со змеиными руками может объединяться с другим, образуя двухручный или четырехрукий робот, или может разделяться на несколько мобильных роботов, а мобильные роботы могут разделяться на несколько меньших или объединить с другими в более крупный или другой. Это позволяет одному модульному роботу быть полностью специализированным для решения одной задачи, а также специализироваться для выполнения нескольких различных задач.
Модульная робототехника в настоящее время применяется в гибридных транспортных средствах,[96] Индустриальная автоматизация,[97] очистка воздуховодов[98] и обработка. Многие исследовательские центры и университеты также изучали эту технологию и разработали прототипы.
Совместные роботы
А коллаборативный робот или же кобот это робот, который может безопасно и эффективно взаимодействовать с людьми при выполнении простых промышленных задач. Тем не менее, рабочие органы и другие условия окружающей среды могут создавать опасность, и поэтому оценка рисков должна выполняться перед использованием любого промышленного приложения для управления движением.[99]
Коллаборативные роботы, наиболее широко используемые сегодня в промышленности, производятся Универсальные роботы в Дании.[100]
Переосмыслить робототехнику -основан Родни Брукс, ранее с я робот - введен Бакстер в сентябре 2012 г .; как промышленный робот разработан для безопасного взаимодействия с соседними людьми и может быть запрограммирован для выполнения простых задач.[101] Бакстеры останавливаются, если обнаруживают человека на пути своих роботизированных рук и имеют заметные выключатели. Предназначенные для продажи малому бизнесу, они продвигаются как роботизированный аналог персонального компьютера.[102] По состоянию на май 2014 г.[Обновить]190 компаний в США купили Baxters, и они используются в коммерческих целях в Великобритании.[11]
Роботы в обществе

Примерно половина всех роботов в мире находится в Азии, 32% - в Европе, 16% - в Северной Америке, 1% - в Австралазия и 1% в Африке.[105] 40% всех роботов в мире находятся в Япония,[106] что делает Японию страной с наибольшим количеством роботов.
Автономия и этические вопросы

По мере того как роботы становятся все более продвинутыми и сложными, эксперты и ученые все чаще исследуют вопросы о том, какая этика может определять поведение роботов,[108] и могут ли роботы требовать каких-либо социальных, культурных, этических или юридических прав.[109] Одна научная группа заявила, что вполне возможно, что мозг робота будет существовать к 2019 году.[110] Другие предсказывают прорыв в области роботизированного интеллекта к 2050 году.[111] Последние достижения сделали поведение роботов более сложным.[112] Социальное влияние интеллектуальных роботов является предметом документального фильма 2010 года под названием Подключи и молись.[113]
Вернор Виндж предположил, что может наступить момент, когда компьютеры и роботы будут умнее людей. Он называет это "Сингулярность ".[114] Он предполагает, что это может быть в некоторой степени или, возможно, очень опасно для человека.[115] Это обсуждается в философии, называемой Сингулярность.
В 2009 году эксперты приняли участие в конференции, организованной Ассоциация развития искусственного интеллекта (AAAI), чтобы обсудить, смогут ли компьютеры и роботы получить какую-либо автономию, и насколько эти способности могут представлять угрозу или опасность. Они отметили, что некоторые роботы приобрели различные формы полуавтономии, в том числе способность самостоятельно находить источники энергии и возможность самостоятельно выбирать цели для атаки с помощью оружия. Они также отметили, что некоторые компьютерные вирусы могут уклоняться от уничтожения и достигли «тараканьего интеллекта». Они отметили, что самосознание, описанное в научной фантастике, вероятно, маловероятно, но есть и другие потенциальные опасности и подводные камни.[114] Различные источники средств массовой информации и научные группы отметили отдельные тенденции в разных областях, которые вместе могут привести к большей функциональности и автономности роботов, и которые вызывают некоторые внутренние проблемы.[116][117][118] В 2015 году было показано, что роботы Nao alderen обладают определенной способностью к самосознанию. Исследователи из Лаборатории искусственного интеллекта и рассуждений в Политехническом институте Ренсселера в Нью-Йорке провели эксперимент, в ходе которого робот осознал себя и исправил свой ответ на вопрос, как только понял это.[119]
Военные роботы
Некоторые эксперты и ученые подвергают сомнению использование роботов в военных действиях, особенно когда таким роботам дается некоторая степень автономности.[120] Есть также опасения по поводу технологий, которые могут позволить управлять одними вооруженными роботами в основном другими роботами.[121] ВМС США профинансировали отчет, в котором указывается, что, как военные роботы становятся более сложными, следует уделять больше внимания последствиям их способности принимать автономные решения.[122][123] Один исследователь утверждает, что автономные роботы могут быть более гуманными, поскольку они могут принимать решения более эффективно. Однако другие эксперты сомневаются в этом.[124]
В частности, один робот, EATR, вызвало обеспокоенность общественности[125] над источником топлива, так как он может постоянно заправляться органическими веществами.[126] Хотя двигатель для EATR предназначен для работы на биомасса и растительность[127] Специально выбранные датчиками, которые он может найти на полях сражений или в других местных условиях, проект заявил, что также можно использовать куриный жир.[128]
Мануэль Де Ланда отметил, что «умные ракеты» и автономные бомбы, оснащенные искусственным восприятием, можно рассматривать как роботов, поскольку они принимают некоторые свои решения автономно. Он считает, что это представляет собой важную и опасную тенденцию, когда люди передают важные решения машинам.[129]
Отношение к безработице
На протяжении веков люди предсказывали, что машины будут производить рабочие устарели и увеличивают безработицу, хотя обычно считается, что причиной безработицы является социальная политика.[130]
Недавний пример замены человека связан с тайваньской технологической компанией. Foxconn которые в июле 2011 года объявили о трехлетнем плане по замене рабочих большим количеством роботов. В настоящее время компания использует десять тысяч роботов, но в течение трех лет планирует увеличить их количество до миллиона.[131]
Юристы предположили, что рост числа роботов на рабочем месте может привести к необходимости улучшения законов о сокращении штатов.[132]
Кевин Дж. Делани сказал: «Роботы занимают рабочие места у людей. Но Билл Гейтс считает, что правительства должны облагать налогом их использование компаниями, чтобы хотя бы временно замедлить распространение автоматизации и финансировать другие виды занятости».[133] В налог на роботов также помогли бы выплатить гарантированный прожиточный минимум уволенным рабочим.
В Всемирный банк с Отчет о мировом развитии В 2019 году представлены доказательства того, что, хотя автоматизация вытесняет рабочих, технологические инновации создают больше новых отраслей и рабочих мест.[134]
Современное использование

В настоящее время существует два основных типа роботов в зависимости от их использования: автономные роботы общего назначения и посвященные роботы.
Роботов можно классифицировать по их специфичность цели. Робот может быть сконструирован так, чтобы очень хорошо выполнять одну конкретную задачу или менее хорошо выполнять ряд задач. Все роботы по своей природе могут быть перепрограммированы на другое поведение, но некоторые из них ограничены своей физической формой. Например, заводской робот-манипулятор может выполнять такие работы, как резка, сварка, склеивание или выступать в роли ярмарочного аттракциона, в то время как робот-подборщик может заполнять только печатные платы.
Автономные роботы общего назначения
Автономные роботы общего назначения могут независимо выполнять множество функций. Автономные роботы общего назначения, как правило, могут независимо перемещаться в известных пространствах, удовлетворять собственные потребности в подзарядке, взаимодействовать с электронными дверями и лифтами и выполнять другие основные задачи. Как и компьютеры, роботы общего назначения могут подключаться к сетям, программному обеспечению и аксессуарам, что увеличивает их полезность. Они могут узнавать людей или предметы, разговаривать, поддерживать дружеские отношения, следить за качеством окружающей среды, реагировать на сигналы тревоги, брать припасы и выполнять другие полезные задачи. Роботы общего назначения могут выполнять множество функций одновременно или выполнять разные роли в разное время суток. Некоторые такие роботы пытаются имитировать людей и даже внешне могут напоминать людей; этот тип роботов называется гуманоидным роботом. Роботы-гуманоиды все еще находятся на очень ограниченной стадии, так как ни один робот-гуманоид пока не может перемещаться по комнате, в которой он никогда не был.[нужна цитата ] Таким образом, роботы-гуманоиды действительно весьма ограничены, несмотря на их разумное поведение в хорошо известной среде.
Заводские роботы
Производство автомобилей
За последние три десятилетия автомобильные заводы стали доминировать роботы. Типичный завод состоит из сотен промышленные роботы работает на полностью автоматизированных производственных линиях, с одним роботом на каждые десять рабочих. На автоматизированной производственной линии шасси автомобиля на конвейере сваренный, приклеенный, покрашены и окончательно собраны на серии роботизированных станций.
Упаковка
Промышленные роботы также широко используются для паллетирования и упаковки промышленных товаров, например, для быстрого извлечения картонных коробок с напитками с конца конвейерной ленты и их укладки в ящики или для загрузки и разгрузки обрабатывающих центров.
Электроника
Массовое производство печатные платы (ПП) почти исключительно производятся роботами-подвозчиками, обычно с СКАРА манипуляторы, удаляющие крошечные электронные компоненты с полосок или лотков и с большой точностью разместите их на печатных платах.[135] Такие роботы могут размещать сотни тысяч компонентов в час, намного превосходя человека по скорости, точности и надежности.[136]
Автоматизированные управляемые машины (АГВ)

Мобильные роботы, следящие за маркерами или проводами в полу или использующие зрение[84] или лазеры, используются для транспортировки товаров вокруг крупных объектов, таких как склады, контейнерные порты или больницы.[137]
Ранние роботы в стиле AGV
Ограничено задачами, которые можно было точно определить и которые нужно было выполнять каждый раз одинаково. Требовалось очень мало обратной связи или интеллекта, а роботам требовалось только самое основное. экстероцепторы (датчики). Ограничения этих AGV заключаются в том, что их пути нелегко изменить, и они не могут изменить свой путь, если препятствия блокируют их. Если один AGV выходит из строя, он может остановить всю работу.
Промежуточные технологии AGV
Разработано для развертывания триангуляции с маяков или сеток штрих-кода для сканирования на полу или потолке. На большинстве заводов системы триангуляции, как правило, требуют обслуживания от среднего до высокого, такого как ежедневная очистка всех радиомаяков или штрих-кодов. Кроме того, если высокий поддон или большое транспортное средство блокирует маяки или поврежден штрих-код, AGV могут потеряться. Часто такие AGV предназначены для использования в среде, свободной от людей.
Интеллектуальные AGV (i-AGV)
Такие как SmartLoader,[138] SpeciMinder,[139] АДАМ,[140] Буксир[141] Эскорта,[142] и MT 400 с Motivity[143] предназначены для удобных для людей рабочих мест. Они ориентируются, узнавая природные особенности. 3D сканеры или другие средства измерения окружающей среды в двух или трех измерениях помогают исключить совокупное ошибки в счисление расчеты текущего положения AGV. Некоторые AGV могут создавать карты своего окружения, используя сканирующие лазеры с одновременная локализация и отображение (SLAM) и используйте эти карты для навигации в реальном времени с другими планирование пути и алгоритмы обхода препятствий. Они могут работать в сложных средах и выполнять неповторяющиеся и непоследовательные задачи, такие как транспортировка фотошаблоны в лаборатории полупроводников, образцы в больницах и товары на складах. Для динамических областей, таких как склады, заполненные поддонами, AGV требуют дополнительных стратегий с использованием трехмерных датчиков, таких как время полета или же стереозрение камеры.
Грязные, опасные, унылые или недоступные задачи
Есть много работ, которые люди предпочли бы оставить роботам. Работа может быть скучной, например домашняя уборка или же разметка линий спортивного поля, или опасно, например, исследование внутри вулкан.[144] Другие рабочие места физически недоступны, например, изучение другого планета,[145] очистка внутренней части длинной трубы или выполнение лапароскопический хирургия.[146]
Космические зонды
Практически каждый беспилотный Космический зонд когда-либо запущен был робот.[147][148] Некоторые из них были запущены в 1960-х годах с очень ограниченными возможностями, но их способность летать и приземляться (в случае Луна 9 ) является показателем их статуса как робота. Это включает Зонды "Вояджер" и зонды Галилео, среди прочего.
Telerobots

Дистанционно управляемые роботы, или телероботы, это устройства дистанционно управляемый на расстоянии человеком-оператором, а не следуя заранее определенной последовательности движений, но имеет полуавтономное поведение. Они используются, когда человек не может присутствовать на объекте для выполнения работы, потому что это опасно, далеко или недоступно. Робот может находиться в другой комнате или в другой стране, или может иметь совершенно другой масштаб по сравнению с оператором. Например, робот для лапароскопической хирургии позволяет хирургу работать внутри пациента-человека в относительно небольших масштабах по сравнению с открытой операцией, что значительно сокращает время восстановления.[146] Их также можно использовать, чтобы не подвергать рабочих воздействию опасных и тесных пространств, таких как канал уборка. При обезвреживании бомбы оператор отправляет небольшого робота, чтобы вывести ее из строя. Некоторые авторы использовали устройство под названием Longpen для удаленной подписи книг.[149] Дистанционно управляемый робот-самолет, такой как Хищник Беспилотный летательный аппарат, все чаще используются военными. Эти беспилотные дроны могут исследовать местность и стрелять по целям.[150][151] Сотни роботов, таких как я робот с Packbot и Фостер-Миллер ТАЛОН используются в Ирак и Афганистан посредством Военные США обезвредить придорожные бомбы или самодельные взрывные устройства (СВУ) в деятельности, известной как Обезвреживание боеприпасов (EOD).[152]
Автоматизированные машины для сбора урожая фруктов
Роботы привыкли автоматизировать сбор фруктов в садах по цене ниже, чем у сборщиков.
Домашние роботы

Домашние роботы это простые роботы, предназначенные для выполнения одной задачи в домашних условиях. Их используют в простых, но часто не любимых делах, таких как Вакуумная чистка, мытье полов, и Стрижка газона. Примером домашнего робота является Roomba.
Военные роботы
Военные роботы включают МЕЧИ робот который в настоящее время используется в наземных боях. Он может использовать различное оружие, и есть некоторые дискуссии о предоставлении ему некоторой степени автономии в ситуациях на поле боя.[153][154][155]
Беспилотные боевые летательные аппараты (БЛА), которые являются модернизированной формой БПЛА, может выполнять самые разные миссии, в том числе боевые. БЛА проектируются, например, BAE Systems Mantis которые будут иметь возможность летать сами, выбирать свой собственный курс и цель и принимать большинство решений самостоятельно.[156] В BAE Taranis - это БЛА, построенный в Великобритании, который может летать через континенты без пилота и имеет новые средства, позволяющие избежать обнаружения.[157] Ожидается, что летные испытания начнутся в 2011 году.[158]
В AAAI глубоко изучил эту тему[108] и его президент заказал исследование, чтобы рассмотреть этот вопрос.[159]
Некоторые высказали предположение о необходимости строительства "Дружелюбный ИИ ", что означает, что успехи, которые уже происходят с ИИ, также должны включать в себя усилия, направленные на то, чтобы сделать ИИ по своей сути дружественным и гуманным.[160] Сообщается, что несколько таких мер уже существуют в таких странах, где много роботов, например, в Японии и Южной Корее[161] приступив к принятию правил, требующих, чтобы роботы были оснащены системами безопасности, и, возможно, наборами «законов», аналогичных законам Азимова. Три закона робототехники.[162][163] Официальный отчет был опубликован в 2009 году Комитетом по политике в области робототехники правительства Японии.[164] Китайские официальные лица и исследователи выпустили отчет, предлагающий набор этических правил и набор новых юридических рекомендаций, получивших название «Робототехнические исследования».[165] Некоторая обеспокоенность была выражена по поводу возможного появления роботов, говорящих очевидную ложь.[166]
Горные роботы
Горные роботы предназначены для решения ряда проблем, с которыми в настоящее время сталкивается горнодобывающая промышленность, включая нехватку навыков, повышение производительности за счет снижения содержания руды и достижение экологических целей. В связи с опасностью добычи полезных ископаемых, в частности подземная добыча, распространенность автономных, полуавтономных и телеуправляемых роботов в последнее время значительно возросла. Ряд производителей автомобилей предоставляют автономные поезда, грузовики и грузчики который будет загружать материал, транспортировать его на шахте к месту назначения и выгружать без вмешательства человека. Одна из крупнейших горнодобывающих корпораций мира, Рио Тинто, недавно расширила свой парк автономных грузовиков до крупнейшего в мире, состоящего из 150 автономных Komatsu грузовики, работающие в Западная Австралия.[167] По аналогии, Л.с. объявила о расширении своего парка автономных буровых установок до крупнейшего в мире 21 автономного Атлас Копко сверла.[168]
Бурение, длинный забой и разрушение пород машины теперь также доступны как автономные роботы.[169] В Атлас Копко Система управления буровой установкой может автономно выполнять план бурения на буровая установка, перемещая буровую установку в нужное положение с помощью GPS, настраивайте буровую установку и выполняйте бурение на заданную глубину.[170] Точно так же Трансмин Система Rocklogic может автоматически планировать путь для размещения камнолома в выбранном пункте назначения.[171] Эти системы значительно повышают безопасность и эффективность горных работ.
Здравоохранение
Роботы в здравоохранении выполняют две основные функции. Те, которые помогают человеку, например, страдающему таким заболеванием, как рассеянный склероз, и те, которые помогают в общих системах, таких как аптеки и больницы.
Домашняя автоматизация для пожилых людей и инвалидов
Роботы, используемые в Домашняя автоматизация со временем развились из простых базовых роботов-помощников, таких как Удобный 1,[172] до полуавтономных роботов, таких как ДРУГ которые могут помочь пожилым людям и инвалидам с общими задачами.
Население старение во многих странах, особенно в Японии, это означает, что растет число пожилых людей, о которых нужно заботиться, но относительно меньше молодых людей, которым необходимо заботиться о них.[173][174] Люди являются лучшими помощниками, но там, где они недоступны, постепенно внедряются роботы.[175]
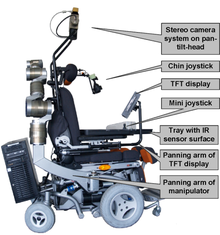
FRIEND - полуавтономный робот, предназначенный для поддержки отключен и пожилой людей в их повседневной деятельности, например, при приготовлении и подаче еды. ДРУГ делают возможным пациенты кто парализованный, есть мышечные заболевания или серьезные паралич (из-за инсульта и т. д.), чтобы выполнять задачи без помощи других людей, таких как терапевты или медперсонал.
Аптеки
Script Pro производит робота, предназначенного для помощи аптекам в отпуске по рецептам, состоящим из твердых или пероральных препаратов. лекарства в форме таблеток.[176][нужен лучший источник ] В фармацевт или же аптечный служащий вводит информацию о рецепте в свою информационную систему. Система, определив, есть ли лекарство в роботе, отправит информацию роботу для наполнения. Робот имеет 3 флакона разного размера, которые необходимо заполнить в зависимости от размера таблетки. Техник-робот, пользователь или фармацевт определяет необходимый размер флакона на основе планшета, когда робот находится на складе. После наполнения флакона его подносят к конвейерной ленте, которая доставляет его к держателю, который вращает флакон и прикрепляет этикетку пациента.После этого его устанавливают на другой конвейер, который доставляет флакон с лекарством пациента в щель, на которой на светодиодном индикаторе отображается имя пациента. Затем фармацевт или техник проверяет содержимое флакона, чтобы убедиться, что это правильный препарат для правильного пациента, а затем герметично закрывает флаконы и отправляет его на прием.
McKesson's Robot RX - это еще один продукт робототехники для здравоохранения, который помогает аптекам ежедневно отпускать тысячи лекарств с небольшими ошибками или без них.[177] Робот может быть десяти футов в ширину и тридцати футов в длину и может содержать сотни различных лекарств и тысячи доз. Аптека экономит много ресурсов, таких как персонал, которые иначе недоступны в отрасли с дефицитом ресурсов. Он использует электромеханический голова в сочетании с пневматический система для захвата каждой дозы и доставки ее в место хранения или выдачи. Голова движется по одной оси, поворачиваясь на 180 градусов, чтобы тянуть лекарства. В этом процессе он использует штрих-код технология для проверки правильности его вытягивания. Затем он доставляет лекарство в специальный контейнер для пациента на конвейерной ленте. После того, как бункер заполнен всеми лекарствами, которые нужны конкретному пациенту и которые хранятся в запасе робота, контейнер освобождается и возвращается на конвейер технику, ожидающему загрузки его в тележку для доставки на пол.
Роботы-исследователи
В то время как большинство роботов сегодня установлено на фабриках или в домах, выполняя работу или спасая жизнь, многие новые типы роботов разрабатываются в лаборатории во всем мире. Большая часть исследований в области робототехники сосредоточена не на конкретных промышленных задачах, а на исследованиях новых типов роботов, альтернативных способов мышления или проектирования роботов и новых способов их производства. Ожидается, что эти новые типы роботов смогут решать проблемы реального мира, когда они наконец будут реализованы.[нужна цитата ]
Бионические и биомиметические роботы
Один из подходов к созданию роботов - основывать их на животных. БионическийКенгуру был разработан и спроектирован путем изучения и применения физиологии и методов передвижения кенгуру.
Нанороботы
Наноробототехника это новые технологии область создания машин или роботов, компоненты которых находятся в микроскопическом масштабе или близки к нему нанометр (10−9 метров). Также известные как «наноботы» или «наниты», они будут построены из молекулярные машины. До сих пор исследователи в основном производили только части этих сложных систем, такие как подшипники, датчики и синтетические молекулярные моторы, но также были созданы работающие роботы, такие как участники конкурса Nanobot Robocup.[178] Исследователи также надеются создать целых роботов размером с вирусы или бактерии, которые могли бы выполнять задачи в крошечном масштабе. Возможные области применения: микрохирургия (на уровне индивидуального клетки ), служебный туман,[179] производство, вооружение и очистка.[180] Некоторые люди предположили, что если бы были нанороботы, которые могли бы воспроизводить, Земля превратилась бы в "серая слизь ", в то время как другие утверждают, что этот гипотетический результат - нонсенс.[181][182]
Реконфигурируемые роботы
Несколько исследователей исследовали возможность создания роботов, которые могут изменить свою физическую форму под конкретную задачу,[183] как вымышленный Т-1000. Однако настоящие роботы далеко не такие сложные, и в основном состоят из небольшого количества единиц кубической формы, которые могут двигаться относительно своих соседей. Разработаны алгоритмы на случай, если такие роботы станут реальностью.[184]
Операторы роботизированных и мобильных лабораторий
В июле 2020 года ученые сообщили о разработке мобильного робота-химика и продемонстрировали, что он может помочь в экспериментальных поисках. По мнению ученых, их стратегия была автоматизация исследователь, а не инструменты - высвобождая время для творческого мышления исследователей - и мог определять смеси фотокатализаторов для производства водорода из воды, которые были в шесть раз более активными, чем исходные составы. Модульный робот может управлять лабораторными приборами, работать почти круглосуточно и автономно принимать решения о своих дальнейших действиях в зависимости от результатов экспериментов.[185][186]
Мягкие роботы
Роботы с силикон корпуса и гибкие приводы (воздушные мышцы, электроактивные полимеры, и феррожидкости ) выглядят и чувствуют себя иначе, чем роботы с жестким скелетом, и могут иметь другое поведение.[187] Мягкие, гибкие (а иногда даже мягкие) роботы часто предназначены для имитации биомеханики животных и других вещей, встречающихся в природе, что приводит к новым применениям в медицине, уходе, поиске и спасании, обработке и производстве пищевых продуктов, а также научных исследованиях. .[188][189]
Рой роботов
Вдохновлен колонии насекомых Такие как муравьи и пчелы, исследователи моделируют поведение рои тысяч крошечных роботов, которые вместе выполняют полезную задачу, например, находят что-то спрятанное, чистят или шпионят. Каждый робот довольно простой, но эмерджентное поведение роя более сложный. Весь набор роботов можно рассматривать как одну распределенную систему, точно так же, как колонию муравьев можно рассматривать как суперорганизм, выставляя рой интеллект. Крупнейшие из созданных к настоящему времени роей включают рой iRobot, проект SRI / MobileRobots CentiBots.[190] и рой проектов с открытым исходным кодом Micro-robotic Project, которые используются для исследования коллективного поведения.[191][192] Рои также более устойчивы к неудачам. В то время как один большой робот может потерпеть неудачу и испортить миссию, рой может продолжаться, даже если несколько роботов потерпят неудачу. Это может сделать их привлекательными для миссий по исследованию космоса, отказ от которых обычно обходится очень дорого.[193]
Роботы с тактильным интерфейсом
Робототехника также находит применение в проектировании виртуальная реальность интерфейсы. Специализированные роботы широко используются в тактильный исследовательское сообщество. Эти роботы, называемые «тактильными интерфейсами», позволяют пользователю с сенсорным управлением взаимодействовать с реальными и виртуальными средами. Роботизированные силы позволяют моделировать механические свойства «виртуальных» объектов, которые пользователи могут испытать через свое чувство трогать.[194]
Современное искусство и скульптура
Современные художники используют роботов для создания работ, включающих механическую автоматизацию. Есть много направлений робототехнического искусства, одна из которых робототехническая инсталляция, тип инсталляция который запрограммирован так, чтобы реагировать на взаимодействие зрителей с помощью компьютеров, датчиков и исполнительных механизмов. Таким образом, будущее поведение таких инсталляций может быть изменено при участии художника или участника, что отличает эти произведения от других типов. кинетическое искусство.
Le Grand Palais в Париже организована выставка «Художники и роботы», на которой представлены работы более сорока художников, созданные с помощью роботов в 2018 году.[195]
Роботы в популярной культуре

Литература
Роботизированные персонажи, андроиды (искусственные мужчины / женщины) или гиноиды (искусственные женщины) и киборги (также "бионический мужчины / женщины », или люди со значительными механическими усовершенствованиями) стали основным продуктом научной фантастики.
Первое упоминание механических слуг в западной литературе появляется в Гомер с Илиада. В книге XVIII, Гефест, бог огня, создает новую броню для героя Ахилла с помощью роботов.[196] Согласно Rieu перевод: «Золотые служанки поспешили помочь своему господину. Они были похожи на настоящих женщин и могли не только говорить и использовать свои конечности, но и были наделены умом и обучены ручной работе бессмертными богами». Слова «робот» или «андроид» не используются для их описания, но они, тем не менее, являются механическими устройствами, внешне похожими на человека. «Первое использование слова« робот »было в пьесе Карела Чапека« R.U.R. »(Универсальные роботы Россум) (написанной в 1920 году)». Писатель Карел Чапек родился в Чехословакии (Чехия).
Возможно, самым плодовитым автором двадцатого века был Айзек Азимов (1920–1992)[197] опубликовал более пятисот книг.[198] Азимова, вероятно, больше всего помнят за его научно-фантастические рассказы, особенно о роботах, где он поместил роботов и их взаимодействие с обществом в центр многих своих работ.[199][200] Азимов внимательно рассмотрел проблему идеального набора инструкций, которые могут быть даны роботам, чтобы снизить риск для людей, и пришел к своему решению. Три закона робототехники: робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинен вред; робот должен подчиняться приказам людей, за исключением случаев, когда такие приказы противоречат Первому закону; и робот должен защищать свое собственное существование, пока такая защита не противоречит Первому или Второму закону.[201] Они были представлены в его рассказе 1942 года «Обход», хотя и были предсказаны в нескольких более ранних рассказах. Позже Азимов добавил Нулевой закон: «Робот не может причинить вред человечеству или своим бездействием позволить человечеству причинить вред»; остальные законы изменяются последовательно, чтобы признать это.
Согласно Оксфордский словарь английского языка, первый отрывок в рассказе Азимова »Лжец! "(1941 г.), в котором упоминается Первый Закон, является самым ранним зарегистрированным использованием слова робототехника. Азимов изначально не знал об этом; он предположил, что это слово уже существует по аналогии с механика гидравлика, и другие подобные термины, обозначающие отрасли прикладного знания.[202]
Фильмы
Роботы появляются во многих фильмах. Большинство роботов в кино - вымышленные. Двумя самыми известными являются R2-D2 и C-3PO от Звездные войны франшиза.
Секс-роботы
Концепция гуманоида секс-роботы вызвало как общественное внимание, так и озабоченность. Противники концепции заявили, что разработка секс-роботов была бы морально неправильной.[203][204][205][206] Они утверждают, что внедрение таких устройств было бы социально вредным и унизительным для женщин и детей.[204]
Проблемы, изображенные в массовой культуре
Страхи и опасения по поводу роботов неоднократно выражались в большом количестве книг и фильмов. Распространенной темой является создание господствующей расы сознательных и очень умных роботов, стремящихся захватить или уничтожить человечество. Франкенштейн (1818), часто называемый первым научно-фантастическим романом, стал синонимом темы робота или андроида, выходящего за рамки своего создателя.
Другие работы с похожими темами включают Механический человек, Терминатор, Убегай, Робокоп, то Репликаторы в Звездные врата, то Цилоны в Battlestar Galactica, то Киберлюдей и Далеков в Доктор Кто, Матрица, Энтиран и Я робот. Некоторые вымышленные роботы запрограммированы убивать и разрушать; другие получают сверхчеловеческий интеллект и способности, обновляя собственное программное обеспечение и оборудование. Примеры популярных СМИ, в которых робот становится злым: 2001: Космическая одиссея, Красная планета и Энтиран.
Игра 2017 года Горизонт нулевой рассвет исследует темы робототехники в войне, этика роботов, а Проблема управления AI, а также положительное или отрицательное влияние, которое такие технологии могут оказать на окружающую среду.
Другой распространенной темой является реакция, которую иногда называют "сверхъестественная долина ", беспокойства и даже отвращения при виде роботов, которые слишком похожи на людей.[107]
Совсем недавно вымышленные изображения роботов с искусственным интеллектом в таких фильмах, как А.И. Искусственный интеллект и Ex Machina и телеадаптация 2016 г. Westworld вызывают симпатию аудитории к самим роботам.
Смотрите также
- Указатель статей по робототехнике
- Краткое описание робототехники
- Искусственный интеллект
- Уильям Грей Уолтер
Конкретные концепции робототехники
- Передвижение робота
- Одновременная локализация и отображение
- Тактильный датчик
- Teleoperation
- Жуткая долина
- машина фон Неймана
- Пробуждение робота
- Нейроморфная инженерия
Методы и категории робототехники
- Когнитивная робототехника
- Робот-компаньон
- Домашний робот
- Эпигенетическая робототехника
- Эволюционная робототехника
- Гуманоидный робот
- Автономный робот
- Микроботика
- Управление роботом
Конкретные роботы и устройства
- AIBO
- Автономный дрон-космодром
- Автомобиль без водителя
- Дружественная робототехника
- Семья Лели Юнона
- Робот для транспортировки жидкостей
- Патрульный бот
- РобоБи
- Робориор
- Магазин приложений для роботов
Рекомендации
- ^ "Четвероногий робот" Гепард "устанавливает новый рекорд скорости". Рейтер. 2012-03-06. В архиве из оригинала от 22.10.2013. Получено 2013-10-05.
- ^ Определение слова «робот». Оксфордский словарь английского языка. Проверено 27 ноября, 2016.
- ^ https://www.conres.com/it-products-solutions/news-events/top-10-tech-trends-autonomous-agents-things/ В архиве 2017-04-19 в Wayback Machine получено 18 апреля, 2017
- ^ «Прогнозы - Обзор рынка беспилотных автомобилей». www.driverless-future.com. Архивировано из оригинал на 2017-04-19. Получено 2017-04-18.
- ^ а б «робототехника». Оксфордские словари. В архиве из оригинала 18 мая 2011 г.. Получено 4 февраля 2011.
- ^ Иван Марголиус, «Робот Праги», Информационный бюллетень, Друзья чешского наследия, № 17, Осень 2017, стр. 3 - 6. https://czechfriends.net/images/RobotsMargoliusJul2017.pdf В архиве 2017-09-11 в Wayback Machine
- ^ а б Карел Чапек - Кто на самом деле изобрел слово «робот» и что оно означает? на capek.misto.cz[мертвая ссылка ] – архив
- ^ а б Курфесс, Томас Р. (1 января 2005 г.). Справочник по робототехнике и автоматизации. Тейлор и Фрэнсис. ISBN 9780849318047. В архиве из оригинала 4 декабря 2016 г.. Получено 5 июля 2016 - через Google Книги.
- ^ Пирс, Джереми. "Джордж К. Девол, изобретатель руки-робота, умер в возрасте 99 лет" В архиве 2016-12-25 на Wayback Machine, Нью-Йорк Таймс, 15 августа 2011 г. Проверено 7 февраля 2012 г. «В 1961 году General Motors поставила первую руку Unimate на конвейер на заводе компании в городке Юинг, штат Нью-Джерси, пригороде Трентона. Устройство использовалось для подъема и штабелирования литые под давлением металлические детали, извлеченные в горячем виде из форм ".
- ^ Акинс, Кристалл. «5 рабочих мест заменяют роботы». Excelle. Монстр. Архивировано из оригинал в 2013-04-24. Получено 2013-04-15.
- ^ а б Хой, Грег (28 мая 2014 г.). «Роботы могут стоить австралийской экономике 5 миллионов рабочих мест, предупреждают эксперты, поскольку компании стремятся сократить расходы». ABC News. Австралийская радиовещательная корпорация. В архиве из оригинала 29 мая 2014 г.. Получено 29 мая 2014.
- ^ Бот "Телеком-глоссарий""". Альянс телекоммуникационных решений. 2001-02-28. Архивировано из оригинал на 2007-02-02. Получено 2007-09-05.
- ^ Полк, Игорь (2005-11-16). «Виртуальный тур по выставке роботов RoboNexus 2005». Выставка Robonexus 2005. В архиве из оригинала от 12.08.2007. Получено 2007-09-10.
- ^ Харрис, Том (16 апреля 2002). «Как работают роботы». Как это работает. В архиве из оригинала от 26.08.2007. Получено 2007-09-10.
- ^ а б c Нидхэм, Джозеф (1991). Наука и цивилизация в Китае: Том 2, История научной мысли. Издательство Кембриджского университета. ISBN 978-0-521-05800-1.
- ^ Карри, Адам (1999). «История робототехники». Архивировано из оригинал 18 июля 2006 г.. Получено 2007-09-10.
- ^ Нокт. Att. Л. 10
- ^ а б Нидхэм, Том 2, 54.
- ^ Дебора Левин Гера (2003). Древнегреческие идеи о речи, языке и цивилизации. Издательство Оксфордского университета. ISBN 978-0-19-925616-7. В архиве из оригинала от 05.12.2016. Получено 2016-09-25.
- ^ Марк Э. Росхайм (1994). "Эволюция роботов: развитие антроботики В архиве 2016-12-05 в Wayback Machine ". стр.2. Wiley-IEEE. ISBN 0-471-02622-0
- ^ "Роботы тогда и сейчас В архиве 2010-12-20 на Wayback Machine ". BBC.
- ^ О'Коннор, Дж. Дж. и Э.Ф. Робертсон. "Биография Цапли". Архив истории математики MacTutor. В архиве из оригинала от 24.06.2008. Получено 2008-09-05.
- ^ Сильный 2007, п. 143.
- ^ Сильный 2007, п. 133-134.
- ^ Фаулер, Чарльз Б. (октябрь 1967). «Музей музыки: история механических инструментов». Журнал музыкальных педагогов. 54 (2): 45–49. Дои:10.2307/3391092. JSTOR 3391092. S2CID 190524140.
- ^ «Ранние часы». Прогулка во времени. Физическая лаборатория NIST. Архивировано из оригинал на 2008-05-31. Получено 2008-08-11.
- ^ а б «Программируемый робот Древней Греции». Новый ученый: 32–35. 6 июля 2007 г.
- ^ Варадпанде, Манохар Лаксман (1987). История индийского театра, Том 1. п. 68. ISBN 9788170172215.
- ^ Вуястык, Доминик (2003). Корни аюрведы: выдержки из санскритских медицинских сочинений. п. 222. ISBN 9780140448245.
- ^ Нидхэм, Джозеф (1965). Наука и цивилизация в Китае: Том 4, Физика и физические технологии, Часть 2, Машиностроение. п. 164. ISBN 9780521058032.
- ^ а б "Аль-Джазари | Арабский изобретатель". Энциклопедия Британника. Получено 2019-06-15.
- ^ Говард Р. Тернер (1997), Наука в средневековом исламе: иллюстрированное введение, п. 81, Техасский университет Press, ISBN 0-292-78149-0
- ^ Дональд Хилл, "Машиностроение на Средневековом Ближнем Востоке", Scientific American, May 1991, pp. 64-9 (ср. Дональд Хилл, Машиностроение В архиве 25 декабря 2007 г. Wayback Machine )
- ^ Древние открытия Исламская наука Часть 1, получено 2019-06-15
- ^ Росхайм, Марк Э. (1994). Эволюция роботов: развитие антроботики. Джон Вили и сыновья. ISBN 978-0-471-02622-8.
- ^ Росхайм, Марк Э. (1994), Эволюция роботов: развитие антроботики, Wiley-IEEE, стр.9, ISBN 0-471-02622-0
- ^ Моран, М. Э. (декабрь 2006 г.). «Робот да Винчи». J. Endourol. 20 (12): 986–90. Дои:10.1089 / конец.2006.20.986. PMID 17206888.
... датой разработки и возможного строительства этого робота был 1495 год ... Начиная с 1950-х годов исследователи из Калифорнийского университета начали задумываться о значении некоторых отметок да Винчи на том, что выглядело как технические чертежи ... Теперь известно, что робот да Винчи имел бы внешний вид германского рыцаря.
- ^ «Роботы Леонардо да Винчи». Леонардо3.net. В архиве из оригинала от 24.09.2008. Получено 2008-09-25.
- ^ Джейн Мари Лоу, Марионетки ностальгии - жизнь, смерть и возрождение японской традиции Авадзи Нингё, 1997, Princeton University Press, ISBN 978-0-691-02894-1
- ^ Вуд, Габби. "Живые куклы: волшебная история поисков механической жизни" В архиве 2016-12-20 в Wayback Machine, Хранитель, 2002-02-16.
- ^ Эдвин Грей, Торпеды девятнадцатого века и их изобретатели, стр. 18
- ^ Грей, Эдвин (2004). Торпеды девятнадцатого века и их изобретатели. Издательство Военно-морского института. ISBN 978-1-59114-341-3.
- ^ Марк Зайфер Жизнь и времена Николы Теслы, страница 1893 Google Книги В архиве 2016-12-05 в Wayback Machine
- ^ Бенджамин Франклин Мисснер, Радиодинамика: беспроводное управление торпедами и другими механизмами, D. Van Nostrand Company, 1916, стр. 83
- ^ США 613809
- ^ «Тесла - мастер молнии». PBS.org. В архиве из оригинала 28-09-2008. Получено 2008-09-24.
- ^ "Словарь Merriam-Webster: robot ". В архиве из оригинала от 07.03.2017. Получено 2017-03-06.
Происхождение: Чехия, из робот, принудительный труд
- ^ "Научная дикция: происхождение слова" Робот "'". В архиве из оригинала на 2018-04-17. Получено 2018-04-05.
- ^ «Первый роман Хэнка Грина - вещь совершенно замечательная». Indianapolis Monthly. 2018-10-01. Получено 2019-11-20.
- ^ "Вы неправильно произносите слово" робот ". Daily Kos. Получено 2019-11-20.
- ^ "А. Х. Реффелл и Эрик Робот (1928)". Архивировано из оригинал на 2013-11-11. Получено 2013-11-11.
- ^ "Знакомьтесь, мистер Робот - не забывший своего хозяина". Возраст. 20 сентября 1935 г. Архивировано с оригинал на 2017-03-07. Получено 7 марта 2017.
- ^ "Робот-мечты: странная история о человеке, который пытается восстановить своего механического друга детства". Бесплатные времена Кливленда. Архивировано из оригинал 15 января 2010 г.. Получено 2008-09-25.
- ^ Скотт Шаут (2006). Роботы Westinghouse: 1924 г. - сегодня. Мемориальный музей Мэнсфилда. ISBN 978-0-9785844-1-2.
- ^ Оуэн Холланд. "Интернет-архив Грея Уолтера". Архивировано из оригинал на 2008-10-09. Получено 2008-09-25.
- ^ Waurzyniak, Патрик (июль 2006 г.). "Мастера производства: Джозеф Ф. Энгельбергер". Общество инженеров-производителей. 137 (1). Архивировано из оригинал 9 ноября 2011 г.. Получено 2008-09-25.
- ^ «Зал славы роботов - Unimate». Университет Карнеги Меллон. Архивировано из оригинал 26 сентября 2011 г.. Получено 2008-08-28.
- ^ «Призывник Национального Зала славы изобретателей 2011 года». Изобретайте сейчас. Архивировано из оригинал на 2014-11-04. Получено 2011-03-18.
- ^ "История компании". Fuji Yusoki Kogyo Co. Архивировано с оригинал 4 февраля 2013 г.. Получено 2008-09-12.
- ^ "Промышленный робот KUKA FAMULUS". Архивировано из оригинал 10 июня 2013 г.. Получено 2008-01-10.
- ^ «История промышленных роботов» (PDF). Архивировано из оригинал (PDF) на 2012-12-24. Получено 2012-10-27.
- ^ «История промышленных роботов». robots.com. Архивировано из оригинал 8 июля 2015 г.. Получено 24 августа 2015.
- ^ "О нас". Архивировано из оригинал на 2014-01-09.
- ^ «Архивная копия». Архивировано из оригинал на 2015-10-07. Получено 2015-10-06.CS1 maint: заархивированная копия как заголовок (связь)
- ^ Роботы получат собственную операционную систему, Мехрет Тесфайе, Ethipian Review, 13 августа 2009 г.
- ^ Исследования и разработки сервисных роботов нового поколения в Японии, Отчет Министерства иностранных дел Соединенного Королевства, Юмико Мойен, Отдел науки и инноваций, Посольство Великобритании, Токио, Япония, январь 2009 г.
- ^ Роботизированное тактильное зондирование - технологии и система. Springer.com. 2012-07-30. ISBN 9789400705784. В архиве из оригинала 29.12.2013. Получено 2014-02-08.
- ^ Dahiya, Ravinder S .; Метта, Джорджио; Канната, Джорджио; Валле, Маурицио (2011). "Специальный выпуск гостевой редакции о чувстве прикосновения роботов". IEEE Transactions по робототехнике. 27 (3): 385–388. Дои:10.1109 / TRO.2011.2155830. S2CID 18608163.
- ^ "Робототехника на практике: возможности будущего" автора Джозеф Ф. Энгельбергер.в журнале "Электронное обслуживание и технологии" 1982 Август.
- ^ Самоходный самосвал Caterpillar В архиве 2011-06-07 на Wayback Machine, Автор Тим МакКео, Быстрая Компания, 25 ноября 2008 г.
- ^ Самоходные грузовики революционизируют логистику, заявляет DHL В архиве 2016-07-22 в Wayback Machine, Ричард Вайс, 9 декабря 2014 г.
- ^ ВИДЕО: Почему технология автономной добычи Caterpillar «полностью отличается от всего», что когда-либо использовалось В архиве 2016-05-13 в Wayback Machine Уэйн Грейсон | 16 октября 2014 г.
- ^ Самосвалы с автоматическим управлением и автоматические экскаваторы прибывают на австралийские шахты В архиве 2016-05-09 в Wayback Machine, КАОРИ ТАКАХАСИ, 23 апреля 2015 г.
- ^ Забудьте об автономных автомобилях Google, в Австралии есть беспилотные грузовики В архиве 2016-04-26 в Wayback Machine, Мэтью Холл, 20 октября 2014 г.
- ^ Австралийский горнодобывающий гигант Rio Tinto использует эти огромные беспилотные грузовики для перевозки железной руды В архиве 2016-05-09 в Wayback Machine, Чарльз Кларк, 19 октября 2015 г.
- ^ Папа, кем был водитель грузовика? В течение следующих двух десятилетий машины сами возьмут на себя управление автомобилем. В архиве 2017-03-04 в Wayback Machine, ДЕННИС К. БЕРМАН, 23 июля 2013 г., wsj.com.
- ^ «Робот умеет читать, учиться как человек». 6 декабря 2010 г.. Получено 10 декабря 2010.
- ^ Роботы: О дивный новый мир на шаг ближе В архиве 2019-01-14 в Wayback Machine Джеймс Мелик, репортер, Business Daily, Всемирная служба Би-би-си, 3 января 2013 г.
- ^ а б Зунт, Доминик. «Кто на самом деле изобрел слово« робот »и что оно означает?». Сайт Карела Чапека. Архивировано из оригинал на 2012-02-04. Получено 2007-09-11.
- ^ "Индоевропейский корень * orbh-". 2008-05-12. Архивировано из оригинал 24 января 2009 г.. Получено 2014-02-08.
- ^ «Интернет-этимологический словарь». В архиве из оригинала от 14.12.2013. Получено 2012-06-10.
- ^ Рейнджер, Стив. «Роботы смерти, роботы любви: реальность солдат-андроидов и почему законы для роботов обречены на провал». TechRepublic. В архиве из оригинала 27 января 2017 г.. Получено 21 января 2017.
- ^ Мубарак, Пол М .; Бен-Цви, Пинхас (2011). «Адаптивное управление мобильным роботом с гибридным механизмом». 2011 Международный симпозиум IEEE по робототехнике и сенсорным средам (ROSE). С. 113–118. Дои:10.1109 / ROSE.2011.6058520. ISBN 978-1-4577-0819-0. S2CID 8659998.
- ^ а б «Умная Кэдди». Seegrid. Архивировано из оригинал на 2007-10-11. Получено 2007-09-13.
- ^ Чжан, Гэсян; Перес-Хименес, Марио Дж .; Георге, Мариан (2017-04-05). Реальные приложения с мембранными вычислениями. Springer. ISBN 9783319559896.
- ^ Каган, Э .; Швалб, Н .; Гал, И. (2019). Автономные мобильные роботы и системы с несколькими роботами: планирование движения, общение и роение. Джон Уайли и сыновья. ISBN 9781119212867.ПП 65-69.
- ^ Патич, Дипак; Ансари, Мунсаф; Тендулкар, Дилиша; Бхатлекар, Ритеш; Найк, Виджайкумар; Шайлендра, Павар (2020). "Обзор автономного военного робота". Международная конференция 2020 года по новым тенденциям в информационных технологиях и инженерии (Ic-ETITE). Международная конференция IEEE по новым тенденциям в области информационных технологий и инженерии. С. 1–7. Дои:10.1109 / ic-ETITE47903.2020.78. ISBN 978-1-7281-4142-8. S2CID 216588335.
- ^ «Определение робота» (PDF). Данск Робот Форнинг. Архивировано из оригинал (PDF) на 2007-06-28. Получено 2007-09-10.
- ^ "Сайты стандартов, связанных с робототехникой". Европейская сеть исследований робототехники. Архивировано из оригинал на 2006-06-17. Получено 2008-07-15.
- ^ Предварительное определение сервисных роботов В архиве 2010-02-18 в Wayback Machine, IFR, 27 октября 2012 г.
- ^ Митганг, Ли (25 октября 1983 г.). "'"Говорящая черепаха" Новы представляет верховного жреца школьного компьютерного движения ". Gainesville Sun.
- ^ Барнард, Джефф (29 января 1985 г.). «Роботы в школе: игры или обучение?». Наблюдатель-Репортер. Вашингтон. В архиве из оригинала 22 сентября 2015 г.. Получено 7 марта, 2012.
- ^ "Образование: чудо Бронкса". Время. Апрель 1974 г. В архиве из оригинала на 2019-05-24. Получено 2019-05-19.
- ^ "Leachim Archives". cyberneticzoo.com. 2010-09-13. В архиве из оригинала на 2019-05-28. Получено 2019-05-29.
- ^ П. Мубарак и др., Модульная и реконфигурируемая мобильная робототехника, Журнал робототехники и автономных систем, 60 (12) (2012) 1648–1663.
- ^ Редакция (25 декабря 2011 г.). "Франко-квебекский консорциум Mix dévoile son projet de voiture volante". aerobuzz.fr/ (На французском). aerobuzz.fr. Архивировано из оригинал 6 октября 2012 г.. Получено 7 сентября, 2012.
- ^ Сканлан, Стив, Robotics Design Inc., Монреаль. «Модульность в робототехнике обеспечивает автоматизацию для всех». Digital.ept.ca. Архивировано из оригинал 15 января 2013 г.. Получено 7 сентября, 2012.
- ^ Сантехника и HVAC, журнал (апрель 2010 г.). «Роботы для чистки воздуховодов» (PDF). roboticsdesign.qc.ca/news.html. plumbingandhvac.ca/. В архиве (PDF) с оригинала 25 апреля 2013 г.. Получено 29 апреля, 2010.
- ^ «Универсальные роботы взаимодействуют за пределами корпусов | Control Engineering». Controleng.com. Февраль 2013. В архиве из оригинала 18.05.2013. Получено 2013-06-04.
- ^ «Краткая история совместных роботов» В архиве 2016-06-10 в Wayback Machine Engineering.com, 19 мая 2016 г.
- ^ Хагерти, Джеймс (18 сентября 2012 г.). "Робот Бакстера за работу'". Wall Street Journal. Нью-Йорк: Dow Jones & Company. В архиве из оригинала 10 апреля 2015 г.. Получено 29 мая 2014.
- ^ Джон Маркофф (18 сентября 2012 г.). «Робот с обнадеживающим прикосновением». Нью-Йорк Таймс. В архиве с оригинала 19 сентября 2012 г.. Получено 18 сентября, 2012.
- ^ "Терминатор, играющий в пинг-понг". Популярная наука. В архиве из оригинала 29.03.2011. Получено 2010-12-18.
- ^ «Лучший робот 2009 года». gadgetrivia.com. Архивировано из оригинал 11 мая 2012 г.
- ^ Роботы сегодня и завтра: IFR представляет обзор мировой статистики робототехники за 2007 год В архиве 2008-02-05 на Wayback Machine; World Robotics; 2007-10-29. Проверено 14 декабря 2007 г.
- ^ Репортаж Ватанабэ, Хироаки; Написание и дополнительный репортаж Негиси, Маюми; Редакция Нортона, Джерри; Японские роботы стремятся стать чемпионом мира В архиве 2007-12-13 на Wayback Machine; Рейтер; 2007-12-02. Проверено 1 января 2007 г.
- ^ а б Ho, C.C .; MacDorman, K. F .; Прамоно, З.А.Д. (2008). «Человеческие эмоции и сверхъестественная долина: анализ рейтингов видео роботов с помощью GLM, MDS и ISOMAP» (PDF). 2008 3-я Международная конференция ACM / IEEE по взаимодействию человека и робота (HRI). В архиве (PDF) из оригинала от 11.09.2008. Получено 2008-09-24.
- ^ а б Сайт AAAI с материалами по этике роботов (Архивировано).
- ^ AAAI сборник статей о правах роботов (Архивировано), источники скомпилированы до 2006 г.
- ^ Ученые предсказывают искусственный мозг через 10 лет (Архивировано), Кристи Макнили, доктор медицины, 29 июля 2009 г.
- ^ Робот: простая машина для трансцендентного разума В архиве 2016-12-05 в Wayback Machine Автор Ханс Моравец, Google Книги.
- ^ Роботы почти покоряют ходьбу, чтение и танцы В архиве 2011-07-21 на Wayback Machine, Мэтью Вейганд, Korea Itimes, понедельник, 17 августа 2009 г.
- ^ Подключи и молись В архиве 2016-02-12 в Wayback Machine, документальный фильм Йенса Шанце о возможностях искусственного интеллекта и робототехники.
- ^ а б Ученые опасаются, что машины могут перехитрить человека В архиве 2017-07-01 в Wayback Machine Джон Маркофф, Нью-Йорк Таймс, 26 июля 2009 г.
- ^ Грядущая технологическая сингулярность: как выжить в постчеловеческую эру В архиве 2007-01-01 на Wayback Machine, Вернор Виндж, Департамент математических наук, Государственный университет Сан-Диего, (c) 1993 Вернор Виндж.
- ^ Gaming the Robot Revolution: эксперт по военным технологиям взвешивает Терминатор: Спасение В архиве 2010-01-27 на Wayback Machine., П. У. Сингер, slate.com, четверг, 21 мая 2009 г.
- ^ Захват роботов (Архивировано), gyre.org.
- ^ страница робота В архиве 2018-05-04 в Wayback Machine, Engadget.
- ^ «Милый робот вежливо проявляет самосознание». В архиве из оригинала от 22.08.2015. Получено 2015-08-19.
- ^ Призыв к дискуссии о роботах-убийцах В архиве 2009-08-07 на Wayback Machine, Джейсон Палмер. BBC News, 3 августа 2009 г.
- ^ Трехходовой робот предвещает будущее за автономностью В архиве 2012-11-07 в Wayback Machine, Дэвид Акс wired.com, 13 августа 2009 г.
- ^ Новый отчет, финансируемый ВМФ, предупреждает о том, что боевые роботы собираются «Терминатора» В архиве 2009-07-28 на Wayback Machine, Джейсон Мик (блог), dailytech.com, 17 февраля 2009 г.
- ^ Отчет ВМФ предупреждает о восстании роботов и предлагает сильный моральный компас В архиве 2011-06-04 на Wayback Machine, Джозеф Л. Флэтли engadget.com, 18 февраля 2009 г.
- ^ Новая роль для роботов-воинов В архиве 2015-09-24 на Wayback Machine Дроны - это всего лишь часть попытки автоматизировать бой. Может ли виртуальная этика заставлять машины принимать решения?, Грегори М. Лэмб, The Christian Science Monitor, 17 февраля 2010 г.
- ^ «Военный робот, питающийся биомассой, - вегетарианец, - заявляет компания». Канал Fox News. 2009-07-16. Архивировано из оригинал на 2009-08-03. Получено 2009-07-31.
- ^ Шахтман, Ной (17.07.2009). «Опасная комната. Что будет дальше в компании национальной безопасности, отрицает, что ее роботы питаются мертвыми». Проводной. В архиве из оригинала от 29.07.2009. Получено 2009-07-31.
- ^ Пресс-релиз, RTI Inc. (16 июля 2009 г.). Cyclone Power Technologies отвечает на слухи о военном роботе, который ест плоть В архиве 2009-08-23 на Wayback Machine, стр. 1-2.
- ^ Пресс-релиз, RTI Inc. (6 апреля 2009 г.). «Краткий обзор проекта» В архиве 2009-08-23 на Wayback Machine, EATR: Энергетически автономный тактический робот, стр.22.
- ^ Мануэль де Ланда, Война в эпоху интеллектуальных машин, Нью-Йорк: Zone Books, 1991, 280 страниц, твердый переплет, ISBN 0-942299-76-0; Мягкая обложка, ISBN 0-942299-75-2.
- ^ Э. МакГоги, «Будут ли роботы автоматизировать вашу работу?» Полная занятость, базовый доход и экономическая демократия '' (2018 г.) ССРН, часть 3 В архиве 2018-05-24 в Wayback Machine. Портер, Эдуардо; Манджу, Фархад (9 марта 2016 г.). «Будущее без работы? Два взгляда на меняющуюся рабочую силу». Нью-Йорк Таймс. В архиве из оригинала 15 февраля 2017 г.. Получено 23 февраля 2017.. Томпсон, Дерек (июль – август 2015 г.). «Мир без работы». Атлантический океан. В архиве из оригинала от 27.02.2017. Получено 2017-03-11.
- ^ Ян (30 июля 2011 г.). «Foxconn заменит рабочих на 1 миллион роботов за 3 года». Информационное агентство Синьхуа. В архиве из оригинала от 8 октября 2011 г.. Получено 4 августа 2011.
- ^ «Судный день - трудовое право и роботы на рабочем месте». будущее. В архиве из оригинала от 03.04.2015. Получено 2015-01-07.
- ^ Делани, Кевин. «Робот, который берет вашу работу, должен платить налоги, - говорит Билл Гейтс». КВАРЦ. В архиве из оригинала 5 марта 2017 г.. Получено 4 марта 2017.
- ^ «Меняющийся характер работы». В архиве с оригинала 30 сентября 2018 г.. Получено 8 октября 2018.
- ^ «Роботы для захвата и размещения контактных систем». Контактные системы. Архивировано из оригинал на 2008-09-14. Получено 2008-09-21.
- ^ «Подборщик SMT». Ассемблеон. Архивировано из оригинал на 2008-08-03. Получено 2008-09-21.
- ^ «Основы автоматизированных транспортных средств». Savant Automation, AGV Systems. Архивировано из оригинал на 2007-10-08. Получено 2007-09-13.
- ^ "Джервис Б. Уэбб". Webb SmartLoader. Архивировано из оригинал 23 мая 2013 г.. Получено 2 сентября 2011.
- ^ "SpeciMinder". CSS Робототехника. В архиве из оригинала от 01.07.2009. Получено 2008-09-25.
- ^ «Робот АДАМ». RMT Robotics. Архивировано из оригинал на 2006-05-17. Получено 2008-09-25.
- ^ "Сможет сделать". Aethon. Архивировано из оригинал на 2008-08-03. Получено 2008-09-25.
- ^ «Робот Эскорта». Fennec Fox Technologies. Архивировано из оригинал на 2011-12-06. Получено 2011-11-25.
- ^ «Роботы доставки и грузовые автомобили». Мобильные роботы. Архивировано из оригинал 26 февраля 2010 г.. Получено 2008-09-25.
- ^ «Данте II, список опубликованных статей». Институт робототехники Университета Карнеги-Меллона. Архивировано из оригинал 15 мая 2008 г.. Получено 2007-09-16.
- ^ "Марсовый следопыт: марсоход Соджорнер". НАСА. 1997-07-08. Архивировано из оригинал на 2017-02-01. Получено 2007-09-19.
- ^ а б «Роботизированная хирургия: хирургическая система да Винчи». Отделение биологии и медицины Университета Брауна. Архивировано из оригинал на 2007-09-16. Получено 2007-09-19.
- ^ Использование космических роботов-зондов в миссиях в дальний космос: пример протоколов искусственного интеллекта и требований к ядерной энергии, Материалы Международной конференции по машиностроению, робототехнике и аэрокосмической промышленности 2011 г., октябрь 2011 г.
- ^ Обзор: космические зонды В архиве 2012-08-31 в Wayback Machine, Джефф Фуст, понедельник, 16 января 2012 г. Обзор космических зондов: 50 лет исследований от Луны 1 до новых горизонтов, Филипп Сегела Firefly, 2011 г.
- ^ "Знаменитости хотят достать LongPen Этвуда". Канадская радиовещательная корпорация. 2007-08-15. Архивировано из оригинал 22 мая 2009 г.. Получено 2008-09-21.
- ^ Грэм, Стивен (12 июня 2006 г.). «Армия роботов Америки». Новый государственный деятель. Архивировано из оригинал 17 февраля 2012 г.. Получено 2007-09-24.
- ^ «Роботы Battlefield: в Ирак и за его пределы». Defense Industry Daily. 2005-06-20. В архиве из оригинала от 26.08.2007. Получено 2007-09-24.
- ^ Шахтман, Ной (ноябрь 2005 г.). "Багдадский отряд бомб". Проводной. В архиве из оригинала от 22.04.2008. Получено 2007-09-14.
- ^ Шахтман, Ной (28 марта 2013 г.). "WIRED: первые вооруженные роботы патрулируют в Ираке". Blog.wired.com. В архиве из оригинала от 03.04.2009. Получено 2014-02-08.
- ^ Шахтман, Ной (28 марта 2013 г.). «WIRED: вооруженные роботы отправлены в полицию». Blog.wired.com. В архиве из оригинала от 12.04.2009. Получено 2014-02-08.
- ^ "Армия роботов Америки". Popularmechanics.com. 2009-12-18. Архивировано из оригинал на 2010-02-05. Получено 2014-02-08.
- ^ Настоящее и будущее беспилотных дронов: иллюстрированное практическое руководство; В архиве 26 февраля 2010 г. Wayback Machine Внутри дикого царства новейших и самых впечатляющих видов беспилотных летательных аппаратов, от кишащих насекомыми ботов, способных штурмовать горящее здание, до семитонного боевого самолета-шпиона, невидимого для радаров. Эрик Хагерман, Popular Science, 23 февраля 2010 г.
- ^ "Таранис: истребитель будущего". Министерство обороны. 2010-07-12. Архивировано из оригинал на 2010-07-15. Получено 2010-07-13.
- ^ Эмери, Дэниел (2010-07-12). «МО снимает крышку с прототипа беспилотного боевого самолета». Новости BBC. В архиве из оригинала от 12.07.2010. Получено 2010-07-12.
- ^ Президентская группа AAAI по исследованию долгосрочного будущего ИИ на 2008–2009 гг. В архиве 2009-08-28 на Wayback Machine, Ассоциация развития искусственного интеллекта. Проверено 26 июля 2009 года.
- ^ Зачем нам нужен дружественный ИИ, Asimovlaws.com, июль 2004 г. Проверено 27 июля 2009 г.
- ^ Эпоха роботов ставит этическую дилемму В архиве 2009-02-15 в Wayback Machine; Новости BBC; 2007-03-07. Проверено 2 января 2007;
- ^ Первый закон Азимова: Япония устанавливает правила для роботов В архиве 2008-10-13 на Wayback Machine, Билл Кристенсен, livescience.com, 26 мая 2006 г.
- ^ Япония разрабатывает правила для продвинутых роботов В архиве 2008-10-11 на Wayback Machine, UPI через Physorg.com, 6 апреля 2007 г.
- ^ Отчет, составленный Комитетом по политике в области робототехники правительства Японии - Создание безопасной и надежной социальной системы, объединяющей сосуществование людей и роботов В архиве 2011-09-27 на Wayback Machine, Официальный пресс-релиз правительства Японии, Министерство экономики, торговли и промышленности, март 2009 г.
- ^ На пути к обществу сосуществования человека и робота: об интеллекте безопасности для роботов следующего поколения В архиве 2009-09-26 на Wayback Machine, доклад Юэ-Сюань Вэна, Министерство внутренних дел Китая, Международный журнал социальной робототехники В архиве 2017-04-29 в Wayback Machine, 7 апреля 2009 г.
- ^ Развивающиеся роботы учатся лгать друг другу В архиве 2013-05-18 в Wayback Machine, Popular Science, 19 августа 2009 г.
- ^ «Rio Tinto Media Center - Rio Tinto увеличивает парк беспилотных грузовиков до 150 в рамках программы Mine of the Future ™». Riotinto.com. Архивировано из оригинал в 2013-04-24. Получено 2014-02-08.
- ^ «Хиты BHP Billiton идут на автономные тренировки». В архиве из оригинала от 22.08.2016. Получено 2016-07-27.
- ^ Адриан (06.09.2011). «Блог AIMEX - Автономное горное оборудование». Adrianboeing.blogspot.com. В архиве из оригинала 18.12.2013. Получено 2014-02-08.
- ^ «Атлас Копко - RCS». Atlascopco.com. Архивировано из оригинал на 2014-02-07. Получено 2014-02-08.
- ^ "Трансмин - Роклогик". Rocklogic.com.au. В архиве из оригинала 25.01.2014. Получено 2014-02-08.
- ^ Топпинг, Майк; Смит, Джейн (1999). «Обзор Handy 1, реабилитационного робота для людей с тяжелыми формами инвалидности». Материалы конференции центра CSUN по вопросам инвалидности. 1999. Материалы: заседание 59. Архивировано с. оригинал 5 августа 2009 г.. Получено 14 августа 2010.
Ранняя версия системы Handy 1 состояла из роботизированной руки Cyber 310 с пятью степенями свободы и захватного устройства.
- ^ Дживанс, Кристин (2004-11-29). «Добро пожаловать в стареющее будущее». Новости BBC. В архиве из оригинала от 16.10.2007. Получено 2007-09-26.
- ^ «Статистический справочник Японии: Глава 2 Население». Статистическое управление и Статистический научно-исследовательский и учебный институт. Архивировано из оригинал на 2013-09-06. Получено 2007-09-26.
- ^ «Роботизированное будущее ухода за пациентами». E-Health Insider. 2007-08-16. Архивировано из оригинал 21 ноября 2007 г.. Получено 2007-09-26.
- ^ Гебхарт, Фред (4 июля 2019 г.). «Будущее автоматизации аптек». Темы наркотиков. Получено 2019-11-20.
- ^ Долан, Керри А. «R2D2 имеет ваши таблетки». Forbes. Получено 2019-11-20.
- ^ «Наноботы играют в футбол». Techbirbal. Архивировано из оригинал на 2013-04-03. Получено 2014-02-08.
- ^ "KurzweilAI.net". 21 июня 2010. Архивировано с оригинал 21 июня 2010 г.. Получено 5 июля 2016.
- ^ "(Эрик Дрекслер, 1986) Двигатели созидания, грядущая эра нанотехнологий". E-drexler.com. В архиве из оригинала от 06.09.2014. Получено 2014-02-08.
- ^ Крис Феникс (декабрь 2003 г.). «О химии, наноботах и политике». Центр ответственных нанотехнологий. В архиве из оригинала от 11.10.2007. Получено 2007-10-28.
- ^ «Пионер нанотехнологий развенчивает мифы о серой слизи». Журналы Института Физики Электроники. 2004-06-07. Получено 2007-10-28. Цитировать журнал требует
| журнал =(помощь)[постоянная мертвая ссылка ] - ^ (1996) LEGO ™ к звездам: активные мезоструктуры, кинетические клеточные автоматы и параллельные наномашины для космических приложений В архиве 2007-09-27 на Wayback Machine
- ^ (Роберт Фитч, Зак Батлер и Даниэла Рус) Планирование реконфигурации гетерогенных самореконфигурируемых роботов В архиве 2007-06-19 на Wayback Machine
- ^ «Исследователи создают робота-ученого, который уже открыл новый катализатор». Phys.org. Получено 16 августа 2020.
- ^ Бургер, Бенджамин; Maffettone, Phillip M .; Гусев Владимир В .; Aitchison, Catherine M .; Бай, Ян; Ван, Сяоянь; Ли, Сяобо; Олстон, Бен М .; Ли, Буй; Клоуз, Роб; Ранкин, Никола; Харрис, Брэндон; Сприк, Райнер Себастьян; Купер, Эндрю И. (июль 2020 г.). «Мобильный робот-химик». Природа. 583 (7815): 237–241. Bibcode:2020Натура.583..237Б. Дои:10.1038 / с41586-020-2442-2. ISSN 1476-4687. PMID 32641813. S2CID 220420261. Получено 16 августа 2020.
- ^ Джон Шварц (2007-03-27). «В лаборатории: роботы, которые крадутся и корчатся». Нью-Йорк Таймс. В архиве из оригинала от 03.04.2015. Получено 2008-09-22.
- ^ Кэт Эшнер (25 марта 2019 г.). «Мягкие роботы теперь имеют мягкие компьютеры, чтобы управлять ими». Популярная наука.
- ^ «Более мягкая сторона робототехники». Май 2019. В архиве из оригинала на 2019-05-17. Получено 2019-05-17.
- ^ «НИИ / Мобильные Роботы». activrobots.com. Архивировано из оригинал на 2009-02-12.
- ^ «Открытый микроробототехнический проект». В архиве из оригинала 11-11-2007. Получено 2007-10-28.
- ^ "Рой". iRobot Corporation. Архивировано из оригинал на 2007-09-27. Получено 2007-10-28.
- ^ Кнапп, Луиза (2000-12-21). "Смотри, в небе: Робофлай". Проводной. В архиве из оригинала от 26.06.2012. Получено 2008-09-25.
- ^ «Передний край тактики». Обзор MIT Technology. Получено 2008-09-25.
- ^ «Выставка художников и роботов в Большом дворце 5 августа по 9 июля 2018 года». 2019-08-14. Архивировано из оригинал на 2019-08-14. Получено 2020-02-03.
- ^ «Комический потенциал: вопросы и ответы с режиссером Стивеном Коулом». Корнелл Университет. Архивировано из оригинал 3 января 2009 г.. Получено 2007-11-21.
- ^ Фридман, изд. Карла (2005). Беседы с Айзеком Азимовым (1. ред.). Джексон: Univ. Пресса Миссисипи. п. vii. ISBN 978-1-57806-738-1. Получено 4 августа 2011.
... вполне возможно, самый плодовитый
CS1 maint: дополнительный текст: список авторов (связь) - ^ Оукс, Элизабет Х. (2004). Американские писатели. Нью-Йорк: факты в файле. п.24. ISBN 978-0-8160-5158-8. Получено 4 августа 2011.
наиболее плодовитые авторы азимов.
- ^ Он написал «более 460 книг, а также тысячи статей и обзоров» и был «третьим по плодовитости писателем всех времен [и] одним из отцов-основателей современной научной фантастики». Белый, Майкл (2005). Исаак Азимов: жизнь великого мастера научной фантастики. Кэрролл и Граф. С. 1–2. ISBN 978-0-7867-1518-3. В архиве из оригинала от 05.12.2016. Получено 2016-09-25.
- ^ Р. Кларк. «Законы робототехники Азимова - значение для информационных технологий». Австралийский национальный университет / IEEE. Архивировано из оригинал на 2008-07-22. Получено 2008-09-25.
- ^ Зайлер, Эдвард; Дженкинс, Джон Х. (27.06.2008). "Айзек Азимов FAQ". Домашняя страница Айзека Азимова. В архиве из оригинала от 16.07.2012. Получено 2008-09-24.
- ^ Белый, Майкл (2005). Исаак Азимов: жизнь великого магистра научной фантастики. Кэрролл и Граф. п. 56. ISBN 978-0-7867-1518-3.
- ^ «Кампания против« вредных »секс-роботов». CNBC. 2015-09-15. В архиве из оригинала на 2017-09-13. Получено 2017-09-10.
- ^ а б «Интеллектуальные машины: призываем к запрету роботов, созданных как секс-игрушки». Новости BBC. 2015-09-15. В архиве из оригинала на 2018-06-30. Получено 2018-06-21.
- ^ «Кампания призывает запретить секс-роботов». Проводная Великобритания. 2005-09-15. В архиве из оригинала на 2017-09-14. Получено 2017-09-10.
- ^ Джастин Вм. Мойер (15 сентября 2015 г.). «Секс с роботами - это действительно плохо, - заявляет Кампания против секс-роботов». Вашингтон Пост. В архиве из оригинала 8 сентября 2016 г.. Получено 10 сентября 2017.
дальнейшее чтение
- Посмотрите на эскизные рисунки этого гуманоидного робота-художника с поля зрения (CNN, видео, 2019)
- Чапек, Карел (1920). R.U.R., Авентинум, Прага.
- Марголиус, Иван. «Робот Праги», Информационный бюллетень, Друзья чешского наследия № 17, Осень 2017, с. 3 - 6. https://czechfriends.net/images/RobotsMargoliusJul2017.pdf
- Глейзер, Хорст Альберт и Россбах, Сабина: Искусственный человек, Франкфурт / М., Берн, Нью-Йорк 2011 «Трагическая история»
- Серия статей TechCast, Джейсон Рупински и Ричард Микс, «Отношение общества к Android: пол, задачи и цены роботов»
- Чейни, Маргарет [1989: 123] (1981). Тесла, человек вне времени. Дорсет Пресс. Нью-Йорк. ISBN 0-88029-419-1
- Крейг, Дж. Дж. (2005). Введение в робототехнику, Пирсон Прентис Холл. Река Аппер Сэдл, Нью-Джерси.
- Гуткинд, Л. (2006). Почти человек: заставляем роботов думать. Нью-Йорк: W. W. Norton & Company, Inc.
- Нидхэм, Джозеф (1986). Наука и цивилизация в Китае: Том 2. Тайбэй: Caves Books Ltd.
- Сотбис Нью-Йорк. Коллекция игрушечных жестяных роботов Мэтта Вайса (1996)
- Цай, Л. В. (1999). Анализ роботов. Вайли. Нью-Йорк.
- ДеЛанда, Мануэль. Война в эпоху интеллектуальных машин. 1991. Swerve. Нью-Йорк.
- Журнал полевой робототехники
внешняя ссылка
| Основные статьи |  | |
|---|---|---|
| Типы | ||
| Классификации | ||
| Передвижение | ||
| Исследование | ||
| Связанный | ||
| ||
| Классические простые станки |  | |
|---|---|---|
| Часы | ||
| Компрессоры и насосы | ||
| Двигатели внешнего сгорания | ||
| Двигатель внутреннего сгорания | ||
| Связи | ||
| Турбина | ||
| Аэрофойл | ||
| Электроника | ||
| Транспортные средства | ||
| Разное | ||
| Авторитетный контроль |
|---|