Электромагнитная подвеска - Electromagnetic suspension

Электромагнитная подвеска (EMS) это Магнитная левитация объекта достигается путем постоянного изменения силы магнитного поля, создаваемого электромагниты используя Обратная связь. В большинстве случаев эффект левитации в основном связан с постоянными магнитами, поскольку они не рассеивают мощность, а электромагниты используются только для стабилизации эффекта.
В соответствии с Теорема Ирншоу а парамагнитно намагниченное тело не может находиться в устойчивом равновесии, когда помещено в любую комбинацию гравитационного и магнитостатический поля. В таких полях существует неустойчивое состояние равновесия. Хотя статические поля не могут обеспечить стабильность, EMS работает, постоянно изменяя ток, подаваемый на электромагниты, чтобы изменить силу магнитного поля и обеспечить стабильную левитацию. В EMS a Обратная связь который непрерывно регулирует один или несколько электромагнитов для коррекции движения объекта, используется для устранения нестабильности.
Многие системы используют магнитное притяжение, тянущее вверх против силы тяжести, для таких систем, поскольку это дает некоторую внутреннюю боковую устойчивость, но некоторые используют комбинацию магнитного притяжения и магнитного отталкивания для толчка вверх.
Технология магнитной левитации важна, потому что она снижает потребление энергии, в значительной степени устраняя трение. Это также позволяет избежать носить и имеет очень низкие требования к обслуживанию. Магнитная левитация широко известна своей ролью в Маглев поезда.
История
Сэмюэл Эрншоу был одним из тех, кто в 1839 году открыл, что «заряженное тело, помещенное в электростатическое поле, не может левитировать в устойчивом равновесии только под действием электрических сил».[1] Аналогичным образом, из-за ограничений на диэлектрическая проницаемость, устойчивое подвешивание или левитация не могут быть достигнуты в статическом магнитном поле с помощью системы постоянные магниты или фиксированный ток электромагниты. Расширение Браунбека (1939) утверждает, что система постоянных магнитов также должна содержать диамагнитный материал или сверхпроводник для получения стабильной статической магнитной левитации или подвески.[2]
Эмиль Бачелет применяемый Теорема Ирншоу а также удлинитель Браунбека и стабилизированная магнитная сила путем управления силой тока и включения и выключения питания электромагнитов на желаемых частотах. В марте 1912 года он получил патент на свой «левитирующий передающий аппарат» (патент № 1 020 942).[3] Его изобретение сначала было предназначено для применения в небольших почтовых системах, но его потенциальное применение в более крупных транспортных средствах, подобных поездам, определенно очевидно.
В 1934 г. Герман Кемпер применил концепцию Бачелет к большому масштабу, назвав его «монорельсовым транспортным средством без колес». Он получил патент Райха № 643316 на свое изобретение, и многие также считают его изобретателем маглева.
В 1979 г. Трансрапид Поезд с электромагнитной подвеской перевозил пассажиров в течение нескольких месяцев в качестве демонстрации на колее длиной 908 м в г. Гамбург во-первых Международная транспортная выставка (IVA 79).
Первый коммерческий поезд Maglev для регулярного обслуживания был открыт в Бирмингеме, Англия, в 1984 году с использованием электромагнитной подвески и линейный асинхронный двигатель для приведения в движение.
Фон
Электромагниты
Когда через провод проходит ток, магнитное поле вокруг этого провода создается. Сила генерируемого магнитного поля пропорциональна току через провод. Когда провод наматывается, это генерируемое магнитное поле концентрируется в центре катушки. Напряженность этого поля можно значительно увеличить, поместив ферромагнитный материал в центр катушки. Этим полем легко управлять, пропуская через провод переменный ток. Поэтому комбинация постоянных магнитов с электромагнитами - оптимальное устройство для левитации.[1] Чтобы снизить требования к средней мощности, часто электромагнитная подвеска используется только для стабилизации левитации, а статическая подъемная сила против силы тяжести обеспечивается системой вторичных постоянных магнитов, часто притягиваемых к относительно недорогому мягкому ферромагнитному материалу, например, железу или стали.
Обратная связь
Положение подвешенного объекта можно определить оптически или магнитно, иногда могут использоваться другие схемы.
Схема обратной связи управляет электромагнитом, чтобы удерживать подвешенный объект в правильном положении.
Однако простое управление положением обычно приводит к нестабильности из-за небольших временных задержек индуктивности катушки и определения положения. На практике схема обратной связи должна использовать изменение положения с течением времени для определения и снижения скорости.
Приложения
Маглев

Маглев (магнитная левитация) - транспортная система, в которой транспортное средство подвешено на направляющем рельсе по принципу электромагнитной подвески. Преимущество Maglev заключается в том, что он тише и плавнее, чем при транспортировке на колесах, благодаря устранению значительной части физического контакта между колесами и гусеницей. Поскольку для маглев требуется направляющий рельс, он в основном используется в рельсовых транспортных системах, таких как поезда.
С момента открытия первого коммерческого поезда на магнитной подвеске в Бирмингем, Англия в 1984 году другие коммерческие системы поездов на магнитной подвеске EMS, такие как M-Bahn и Трансрапид также были введены в ограниченное использование. (Маглевские поезда на базе электродинамический подвес технологии также были разработаны и внедрены.) За возможным исключением 30,5 км Шанхайский поезд на маглеве, основные междугородные маршруты EMS на магнитной подвеске еще не построены.
Активный магнитный подшипник
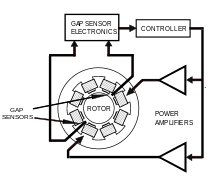
Активный магнитный подшипник (AMB) работает по принципу электромагнитной подвески и состоит из электромагнит сборка, комплект усилителей мощности, подающих ток на электромагниты, контролер и датчики зазора с соответствующей электроникой для обеспечения обратной связи, необходимой для управления положением ротора в зазоре. Эти элементы показаны на схеме. Усилители мощности подают равный ток смещения на две пары электромагнитов на противоположных сторонах ротора. Это постоянное перетягивание каната осуществляется контроллером, который компенсирует ток смещения равными, но противоположными возмущениями тока, когда ротор отклоняется на небольшую величину от своего центрального положения.
Датчики зазора обычно являются индуктивными по своей природе и работают в дифференциальном режиме. Усилители мощности в современном коммерческом применении представляют собой твердотельные устройства, которые работают в широтно-импульсная модуляция (ШИМ) конфигурация. Контроллер обычно микропроцессор или же DSP.
Помощь при запуске космического корабля
НАСА разрабатывает стартовое средство, использующее систему магнитной левитации для приведения в движение космического корабля. Сторонники средства запуска на магнитной подвеске утверждают, что оно позволяет сэкономить на проектировании и затратах на запуск, обеспечивая при этом более безопасный метод запуска.[4]
Смотрите также
- Маглев
- Магнитная левитация
- Электродинамический подвес создается движущимися магнитами или проводниками
- ROMAG
- Krauss-Maffei Transurban
Рекомендации
- ^ а б Б. В. Джаявант. В Atsugi Unisia Corporation, Брайтон, BNl 9QT, Великобритания. Школа инженерии и прикладных наук Университета Сассекса. Электромагнитная подвеска и левитация.
- ^ K.X. Quian, P. Zeng, W.M. Ru, H.Y. Юань (2005) Новые концепции и новый дизайн постоянных вращающихся магнитных насосов искусственного сердца для крови, Медицинская инженерия и физика 28(2006) 383-388
- ^ «Эспаснет - Оригинальный документ». world.espacenet.com.
- ^ Ракета-носитель 21-го века Транспортные средства MagLev тестировались как стартовая AIf. (1999/12/13). Авиационная неделя и космические технологии, 151 (24), 78.
внешняя ссылка
Электромагнитная подвеска BOSE: