Реальная проективная плоскость - Real projective plane
 В фундаментальный многоугольник проективной плоскости. | 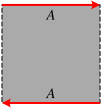 В Лента Мебиуса с одним ребром, можно замкнуть в проективную плоскость, склеив противоположные открытые ребра вместе. |  Для сравнения Бутылка Клейна - лента Мёбиуса, замкнутая в цилиндр. |
В математика, то настоящий проективная плоскость является примером компактного не-ориентируемый двумерный многообразие; другими словами, односторонний поверхность. Не может быть встроенный в стандартном трехмерном пространстве, не пересекаясь. Он имеет базовые приложения для геометрия, поскольку обычная конструкция вещественной проективной плоскости - это пространство прямых в р3 проходящий через начало координат.
Плоскость также часто описывают топологически, в терминах конструкции, основанной на Лента Мебиуса: если бы можно было приклеить (единственный) край ленты Мёбиуса к себе в правильном направлении, то получилась бы проективная плоскость. (Это невозможно сделать в трехмерном пространстве, если поверхность не пересекает сама себя.) Эквивалентно, приклеивание диска вдоль границы ленты Мёбиуса дает проективную плоскость. Топологически он имеет Эйлерова характеристика 1, следовательно, a полукруг (неориентируемый род, род Эйлера) 1.
Поскольку ленту Мёбиуса, в свою очередь, можно построить из квадрат Таким образом, склеив две стороны вместе, реальную проективную плоскость можно представить в виде единичного квадрата (то есть [0, 1] × [0,1]) со сторонами, обозначенными следующими отношения эквивалентности:
- (0, у) ~ (1, 1 − у) для 0 ≤у ≤ 1
и
- (Икс, 0) ~ (1 − Икс, 1) для 0 ≤Икс ≤ 1,
как на крайней левой диаграмме, показанной здесь.
Примеры
Проективная геометрия не обязательно связана с кривизной, и реальная проективная плоскость может быть скручена и помещена в евклидову плоскость или 3-пространство разными способами.[1] Некоторые из наиболее важных примеров описаны ниже.
Проективная плоскость не может быть встроенный (то есть без пересечения) в трехмерном Евклидово пространство. Доказательство того, что проективная плоскость не встраивается в трехмерное евклидово пространство, выглядит следующим образом: предполагая, что она действительно встраивается, она ограничивает компактную область в трехмерном евклидовом пространстве Обобщенная теорема о кривой Жордана. Векторное поле единичной нормали, направленное наружу, тогда дало бы ориентация граничного многообразия, но граничное многообразие было бы проективная плоскость, который не ориентируется. Это противоречие, и поэтому наше предположение, что оно действительно встраивается, должно быть ложным.
Проективная сфера
Рассмотрим сфера, и пусть большие круги сферы будут "прямыми", и пусть пары противоположные точки быть «точками». Легко проверить, что эта система подчиняется аксиомам, необходимым для проективная плоскость:
- любая пара различных больших окружностей пересекается в паре противоположных точек; и
- любые две различные пары противоположных точек лежат на одной большой окружности.
Если мы отождествляем каждую точку на сфере с ее противоположной точкой, то мы получаем представление реальной проективной плоскости, в котором «точки» проективной плоскости действительно являются точками. Это означает, что проективная плоскость - это фактор-пространство сферы, полученное разбиением сферы на классы эквивалентности по отношению эквивалентности ~, где x ~ y если y = x или y = −x. Это фактор-пространство сферы есть гомеоморфный с набором всех линий, проходящих через начало координат в р3.
Фактор-отображение сферы на реальную проективную плоскость на самом деле является двухлистным (то есть два к одному) карта покрытия. Отсюда следует, что фундаментальная группа вещественной проективной плоскости - циклическая группа порядка 2; т.е. целые числа по модулю 2. Можно взять цикл AB на рисунке выше - генератор.
Проективное полушарие
Поскольку сфера дважды покрывает реальную проективную плоскость, плоскость может быть представлена как замкнутая полусфера, на краю которой аналогично определены противоположные точки.[2]
Поверхность мальчика - погружение
Проективная плоскость может быть погруженный (локальные окрестности исходного пространства не имеют самопересечений) в 3-м пространстве. Поверхность мальчика это пример погружения.
Примеры многогранников должны иметь не менее девяти граней.[3]
Римская поверхность

Штайнера Римская поверхность является более вырожденным отображением проективной плоскости в 3-пространство, содержащее кросс-кепка.

А многогранник представительство тетрагемигексаэдр,[4] который имеет тот же общий вид, что и римская поверхность Штейнера, показанная здесь.
Hemi многогранники
Глядя в противоположном направлении, абстрактные правильные многогранники – полукуб, полудодекаэдр, и полуикосаэдр - могут быть построены как обычные фигуры в проективная плоскость; смотрите также проективные многогранники.
Плоские проекции
Описаны различные плоские (плоские) проекции или отображения проективной плоскости. В 1874 году Кляйн описал отображение:[1]

Центральная проекция проективной полусферы на плоскость дает обычную бесконечную проективную плоскость, описанную ниже.
Диск с крестообразным колпачком
Замкнутая поверхность получается склейкой диск к кросс-кепка. Эта поверхность может быть представлена параметрически следующими уравнениями:

где оба ты и v диапазон от 0 до 2π.
Эти уравнения аналогичны уравнениям тор. На рисунке 1 показан закрытый диск с крестообразной крышкой.
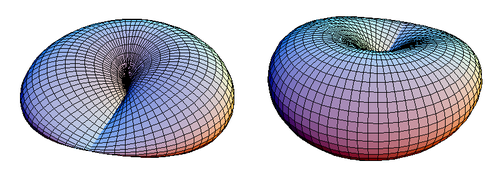 |
| Рис. 1. Два вида диска с крестообразным колпачком. |
Диск с крестообразным колпачком имеет плоскость симметрии который проходит через его отрезок двойных точек. На рисунке 1 диск с перекрестной крышкой виден сверху в плоскости его симметрии. z = 0, но он будет выглядеть так же, если смотреть снизу.
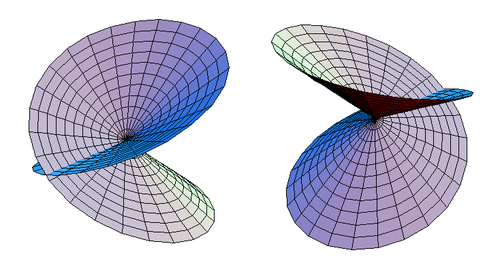
Диск с перекрестным колпачком можно разрезать вдоль его плоскости симметрии, следя за тем, чтобы не разрезать ни одну из его двойных точек. Результат показан на рисунке 2.
 |
| Рис. 2. Два вида разрезанного диска с крестообразной крышкой. |
Как только это исключение будет сделано, будет видно, что нарезанный диск с перекрестными крышками гомеоморфный к самопересекающемуся диску, как показано на рисунке 3.
 |
| Рис. 3. Два альтернативных вида самопересекающегося диска. |
Самопересекающийся диск гомеоморфен обычному диску. Параметрические уравнения самопересекающегося диска:

куда ты колеблется от 0 до 2π и v колеблется от 0 до 1.
Проецируя самопересекающийся диск на плоскость симметрии (z = 0 в параметризации, данной ранее), который проходит только через двойные точки, в результате получается обычный диск, который повторяется (удваивается сам на себя).
Самолет z = 0 разрезает самопересекающийся диск на пару дисков, которые являются зеркальными размышления друг друга. Диски имеют центры в источник.
Теперь рассмотрим обода дисков (с v = 1). Точки на ободе самопересекающегося диска попадают в пары, которые являются отражениями друг друга относительно плоскости. z = 0.
Диск с перекрестным колпачком формируется путем идентификации этих пар точек, что делает их эквивалентными друг другу. Это означает, что точка с параметрами (ты, 1) и координаты отождествляется с точкой (ты + π, 1) с координатами . Но это означает, что пары противоположных точек на ободе (эквивалентного) обычного диска отождествляются друг с другом; так из диска формируется реальная проективная плоскость. Следовательно, поверхность, показанная на рисунке 1 (крестовина с диском), топологически эквивалентна реальной проективной плоскости. RP2.


Однородные координаты
Точки на плоскости могут быть представлены как однородные координаты. Точка имеет однородные координаты [Икс : у : z], где координаты [Икс : у : z] и [tx : ты : tz] считаются представляющими одну и ту же точку для всех ненулевых значений т. Точки с координатами [Икс : у : 1] обычные настоящий самолет, называется конечная часть проективной плоскости и точки с координатами [Икс : у : 0], называется указывает на бесконечность или же идеальные точки, составляют линию, называемую линия на бесконечности. (Однородные координаты [0: 0: 0] не представляют никакой точки.)
Линии на плоскости также могут быть представлены однородными координатами. Проективная прямая, соответствующая плоскости топор + к + cz = 0 в р3 имеет однородные координаты (а : б : c). Таким образом, эти координаты имеют отношение эквивалентности (а : б : c) = (да : db : Округ Колумбия) для всех ненулевых значений d. Следовательно, другое уравнение той же линии dax + dby + DCZ = 0 дает такие же однородные координаты. Точка [Икс : у : z] лежит на линии (а : б : c) если топор + к + cz = 0. Следовательно, прямые с координатами (а : б : c) куда а, б не оба 0 соответствуют линиям в обычном настоящий самолет, потому что они содержат точки, не удаленные на бесконечность. Линия с координатами (0: 0: 1) - это линия на бесконечности, поскольку на ней есть только точки сz = 0.
Точки, линии и плоскости

Линия в п2 можно представить уравнением топор + к + cz = 0. Если рассматривать а, б, и c как вектор-столбец ℓ и Икс, у, z как вектор-столбец Икс то приведенное выше уравнение можно записать в матричной форме как:
- ИксТℓ = 0 или ℓТИкс = 0.
Используя векторные обозначения, мы можем вместо этого написать Икс ⋅ ℓ = 0 или ℓ ⋅ Икс = 0.
Уравнение k(ИксТℓ) = 0 (где k - ненулевой скаляр) заметает плоскость, проходящую через нуль в р3 и k(Икс) заметает строку, снова проходя через ноль. Самолет и линия линейные подпространства в р3, которые всегда проходят через ноль.
Идеальные точки
В п2 уравнение линии топор + к + cz = 0 и это уравнение может представлять собой линию на любой плоскости, параллельную Икс, у плоскости, умножив уравнение на k.
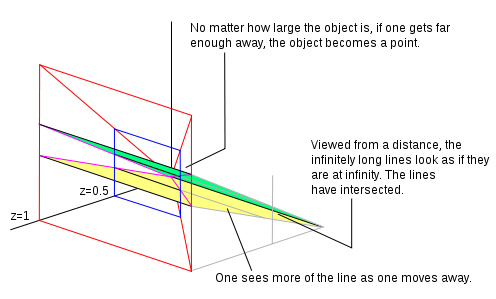
Если z = 1 у нас есть нормированная однородная координата. Все точки, у которых есть z = 1 создать плоскость. Представим, что мы смотрим на этот самолет (с позиции дальше по z оси и глядя назад к началу координат), и на плоскости нарисованы две параллельные линии. С того места, где мы стоим (учитывая наши визуальные возможности), мы можем видеть только определенную часть плоскости, которую мы представляем как область, обведенную красным на диаграмме. Если мы отойдем от самолета по z оси (все еще глядя назад, в сторону начала координат), мы можем видеть большую часть плоскости. В нашем поле зрения сместились исходные точки. Мы можем отразить это движение, разделив однородную координату на константу. На соседнем изображении мы разделили на 2, поэтому z значение теперь становится 0,5. Если мы отойдем достаточно далеко, то, на что мы смотрим, станет точкой вдали. Уходя, мы видим все больше и больше параллельных линий. Линии встретятся на бесконечности (линия, проходящая через ноль на плоскости на z = 0). Линии на самолете, когда z = 0 идеальные точки. Самолет в z = 0 линия на бесконечности.
Однородная точка (0, 0, 0) это то место, куда идут все реальные точки, когда вы смотрите на самолет с бесконечного расстояния, линия на z = 0 плоскость - это место пересечения параллельных линий.
Двойственность
В уравнении ИксТℓ = 0 есть два вектор-столбец. Вы можете оставить одно постоянным, а другое изменить. Если мы сохраним суть Икс постоянным и меняем коэффициенты ℓ мы создаем новые линии, проходящие через точку. Если мы сохраним коэффициенты постоянными и изменим точки, удовлетворяющие уравнению, мы создадим линию. Мы смотрим на Икс как точку, потому что оси, которые мы используем, Икс, у, и z. Если бы мы вместо этого построили коэффициенты с помощью оси, отмеченной а, б, c точки станут линиями, а линии станут точками. Если вы что-то докажете данные нанесены на график на оси отмечен Икс, у, и z тот же аргумент можно использовать для данных, нанесенных на ось, отмеченную а, б, и c. Это двойственность.
Линии, соединяющие точки и пересечение линий (с использованием двойственности)
Уравнение ИксТℓ = 0 вычисляет внутренний продукт двух векторов-столбцов. Внутреннее произведение двух векторов равно нулю, если векторы ортогональный. В п2, линия между точками Икс1 и Икс2 может быть представлен как вектор-столбец ℓ что удовлетворяет уравнениям Икс1Тℓ = 0 и Икс2Тℓ = 0, или другими словами вектор-столбец ℓ что ортогонально Икс1 и Икс2. В перекрестное произведение найдет такой вектор: линия, соединяющая две точки, имеет однородные координаты, заданные уравнением Икс1 × Икс2. Пересечение двух прямых может быть найдено таким же образом, используя двойственность, как перекрестное произведение векторов, представляющих линии, ℓ1 × ℓ2.
Вложение в 4-мерное пространство
Проективная плоскость вкладывается в 4-мерное евклидово пространство. Реальная проективная плоскость п2(р) это частное двусферы
- S2 = {(Икс, у, z) ∈ р3 : Икс2 + у2 + z2 = 1}
антиподальным отношением (Икс, у, z) ~ (−Икс, −у, −z). Рассмотрим функцию р3 → р4 данный (Икс, у, z) ↦ (ху, xz, у2 − z2, 2yz). Эта карта ограничивается картой, домен которой S2 и, поскольку каждый компонент является однородным полиномом четной степени, он принимает те же значения в р4 на каждой из двух любых противоположных точек на S2. Это дает карту п2(р) → р4. Более того, это отображение является вложением. Обратите внимание, что это вложение допускает проекцию в р3 какой Римская поверхность.
Высшие неориентируемые поверхности
Последовательно склеивая проективные плоскости, мы получаем неориентируемые поверхности высших полукруг. Процесс склейки состоит из вырезания небольшого диска с каждой поверхности и определения (склейка) их граничные круги. Склеивание двух проективных плоскостей создает Бутылка Клейна.
Статья о фундаментальный многоугольник описывает высшие неориентируемые поверхности.
Смотрите также
- Реальное проективное пространство
- Проективное пространство
- Неравенство Пу для вещественной проективной плоскости
- Гладкая проективная плоскость
Рекомендации
- Кокстер, H.S.M. (1955), Реальная проективная плоскость, 2-е изд. Кембридж: В University Press.
- Рейнхольд Баер, Линейная алгебра и проективная геометрия, Довер, 2005 г.ISBN 0-486-44565-8 )
- Рихтер, Дэвид А., Две модели реальной проективной плоскости, получено 2010-04-15