Глубокий космос 1 - Deep Space 1
Эта статья нужны дополнительные цитаты для проверка. (Октябрь 2012 г.) (Узнайте, как и когда удалить этот шаблон сообщения) |
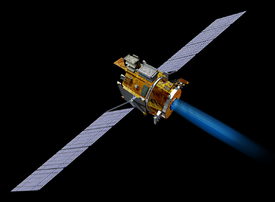 Художественная концепция Глубокий космос 1 | |||||||||
| Тип миссии | Демонстратор технологий | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Оператор | НАСА / JPL | ||||||||
| COSPAR ID | 1998-061A | ||||||||
| SATCAT нет. | 25508 | ||||||||
| Интернет сайт | http://www.jpl.nasa.gov/missions/deep-space-1-ds1/ | ||||||||
| Продолжительность миссии | Финал: 3 года, 1 месяц, 24 дня | ||||||||
| Свойства космического корабля | |||||||||
| Производитель | Корпорация орбитальных наук | ||||||||
| Стартовая масса | 486 кг (1071 фунтов)[1] | ||||||||
| Сухая масса | 373 кг (822 фунта)[1] | ||||||||
| Размеры | 2,1 × 11,8 × 2,5 м (6,9 × 38,6 × 8,2 футов) | ||||||||
| Мощность | 2500 Вт[1] | ||||||||
| Начало миссии | |||||||||
| Дата запуска | 24 октября 1998, 12:08 универсальное глобальное время[2] | ||||||||
| Ракета | Дельта II 7326[1] | ||||||||
| Запустить сайт | мыс Канаверал SLC-17A[1] | ||||||||
| Конец миссии | |||||||||
| Утилизация | Списан | ||||||||
| Деактивировано | 18 декабря 2001, 20:00 универсальное глобальное время[2] | ||||||||
| Пролетая 9969 Брайля | |||||||||
| Ближайший подход | 29 июля 1999 г., 04:46 UTC[2] | ||||||||
| Расстояние | 26 км (16 миль) | ||||||||
| Пролетая 19P / Borrelly | |||||||||
| Ближайший подход | 22 сентября 2001 г., 22:29:33 UTC[2] | ||||||||
| Расстояние | 2171 км (1349 миль) | ||||||||
| |||||||||
 Логотип миссии DS1 | |||||||||
Глубокий космос 1 (DS1) был НАСА демонстрация технологий космический корабль который пролетел астероид и комета. Это было частью Программа нового тысячелетия, посвященная тестированию передовых технологий.
Запущенный 24 октября 1998 года, Глубокий космос 1 космический корабль совершил облет астероида 9969 Брайля, что было его основной научной целью. Миссия дважды расширялась, чтобы включить встречу с кометой. 19P / Borrelly и дальнейшие инженерные испытания. Проблемы на начальных этапах и с его звездным трекером привели к неоднократным изменениям конфигурации миссии. Хотя пролет астероида был лишь частичным, встреча с кометой дала ценную информацию. Три из двенадцати технологий на борту должны были сработать в течение нескольких минут после отделения от ракеты-носителя для продолжения миссии.
Продолжил серию Deep Space Глубокий космос 2 зонды, которые были запущены в январе 1999 г. Марс полярный посадочный модуль и были предназначены для удара по поверхности Марса (хотя контакт был потерян и миссия провалилась). Глубокий космос 1 был первым космическим аппаратом НАСА, который использовал ионный двигатель а не традиционные ракеты с химическим двигателем.[3]
Технологии
Цель Глубокий космос 1 разработка и проверка технологий для будущих миссий; Было протестировано 12 технологий:[4]
- Солнечная электрическая тяга
- Солнечные концентраторы
- Многофункциональная структура
- Миниатюрная интегрированная камера и спектрометр формирования изображений
- Ионный и электронный спектрометр
- Транспондер для малого дальнего космоса
- Твердотельный усилитель мощности в Ka-диапазоне
- Работа монитора маяка
- Автономный удаленный агент
- Электроника малой мощности
- Модуль включения и переключения мощности
- Автономная навигация
Система Autonav, разработанная НАСА Лаборатория реактивного движения, делает снимки известных ярких астероиды. Астероиды во внутренней Солнечной системе движутся относительно других тел с заметной, предсказуемой скоростью. Таким образом, космический корабль может определять свое относительное положение, отслеживая такие астероиды на звездном фоне, который кажется фиксированным в таких временных масштабах. Два или более астероида позволяют космическому кораблю определить свое положение по триангуляции; две или более позиции во времени позволяют космическому кораблю определять свою траекторию. Существующие космические аппараты отслеживаются по их взаимодействию с передатчиками Сеть дальнего космоса НАСА (DSN), по сути, обратный GPS. Однако для отслеживания DSN требуется много квалифицированных операторов, а DSN перегружен своим использованием в качестве сети связи. Использование Autonav снижает стоимость миссии и требования DSN.
Система Autonav также может использоваться в обратном направлении, отслеживая положение тел относительно космического корабля. Это используется для обнаружения целей для научных инструментов. Космический корабль запрограммирован на грубое местоположение цели. После первоначального захвата Autonav удерживает объект в кадре, даже используя управление ориентацией космического корабля.[5] Следующим космическим аппаратом, использующим Autonav, был Существенное воздействие.
Концентрирующая солнечная батарея SCARLET
Основная энергия для миссии была произведена с помощью новой технологии солнечных батарей, солнечной батареи концентраторов с технологией преломляющих линейных элементов (SCARLET), в которой используются линейные Линзы Френеля сделано из силикон концентрировать солнечный свет на солнечных элементах.[6] Компания ABLE Engineering разработала технологию концентратора и построила солнечную батарею для DS1 вместе с Entech Inc, которая поставила оптику Френеля, и НАСА. Исследовательский центр Гленна. Мероприятие спонсировалось Организацией противоракетной обороны. Технология концентрирующих линз была объединена с солнечными элементами с двойным переходом, которые имели значительно лучшие характеристики, чем у GaAs солнечные элементы, которые были современными на момент запуска миссии.
Массивы SCARLET генерировали 2,5 киловатта на 1 АЕ, имея меньший размер и вес, чем обычные массивы.
Ионный двигатель NSTAR
Несмотря на то что ионные двигатели были разработаны в НАСА с конца 1950-х годов, за исключением SERT миссиях 1960-х годов эта технология не была продемонстрирована в полете на космических кораблях Соединенных Штатов, хотя сотни Двигатели на эффекте Холла использовался на советских и российских космических кораблях. Это отсутствие опыта работы в космосе означало, что, несмотря на потенциальную экономию массы топлива, технология считалась слишком экспериментальной, чтобы ее можно было использовать для дорогостоящих миссий. Кроме того, непредвиденные побочные эффекты ионного движения могут каким-то образом помешать типичным научным экспериментам, таким как измерения полей и частиц. Следовательно, это была основная миссия Глубокий космос 1 демонстрация длительного использования ионного двигателя малой тяги в научной миссии.[7]
В Готовность НАСА к применению солнечных технологий (NSTAR) электростатический ионный двигатель, разработанный в NASA Glenn, достигает удельный импульс 1000–3000 секунд. Это на порядок больше, чем у традиционных космических двигателей, что дает экономию массы примерно вдвое. Это приводит к гораздо более дешевым ракетам-носителям. Хотя двигатель выдает всего 92 миллиньютон (0.33 унцияж ) тяги на максимальной мощности (2100 Вт на DS1) корабль достиг высоких скоростей, потому что ионные двигатели работали непрерывно в течение длительного времени.[7]
Следующим космическим кораблем, использующим двигатели NSTAR, был Рассвет, с тремя резервными блоками.[8]



Удаленный агент
Remote Agent (RAX), программное обеспечение для удаленного интеллектуального самовосстановления, разработанное НАСА Исследовательский центр Эймса и Лаборатория реактивного движения, была первой системой управления с искусственным интеллектом, которая могла управлять космическим кораблем без участия человека.[9] Remote Agent успешно продемонстрировал способность планировать действия на борту, правильно диагностировать и реагировать на смоделированные неисправности в компонентах космического корабля с помощью встроенной среды REPL.[10] Автономное управление позволит космическим кораблям будущего работать на больших расстояниях от Земли и выполнять более сложные научные исследования в глубоком космосе. Компоненты программного обеспечения Remote Agent использовались для поддержки других миссий НАСА. Основными компонентами Remote Agent были надежный планировщик (EUROPA), система выполнения планов (EXEC) и диагностическая система на основе моделей (Livingstone).[10] EUROPA использовалась в качестве наземного планировщика для Марсоходы. EUROPA II использовалась для поддержки Феникс Посадочный модуль на Марс и Марсианская научная лаборатория. Ливингстон-2 летал в качестве эксперимента на борту Наблюдение Земли-1 и на F / A-18 Hornet в НАСА Центр летных исследований Драйдена.
Beacon Monitor
Еще один метод снижения нагрузки на DSN - это Beacon Monitor эксперимент. Во время длительных крейсерских периодов полета работа космических кораблей практически приостанавливается. Вместо данных корабль издает несущий сигнал на заданной частоте. Без декодирования данных несущая может быть обнаружена гораздо более простыми наземными антеннами и приемниками. Если космический корабль обнаруживает аномалию, он переключает несущую между четырьмя тонами в зависимости от срочности. Затем наземные приемники сигнализируют операторам об отвлечении ресурсов DSN. Это не позволяет квалифицированным операторам и дорогостоящему оборудованию присматривать за необременительной миссией, выполняемой номинально. Аналогичная система используется на Новые горизонты Зонд Плутона для снижения затрат во время его десятилетнего круиза от Юпитера до Плутона.
SDST

В Транспондер для малого дальнего космоса (SDST) - это компактная и легкая система радиосвязи. Помимо использования миниатюрных компонентов, SDST может обмениваться данными через Kа группа. Поскольку эта полоса частот выше, чем диапазоны, которые в настоящее время используются для миссий в дальний космос, такой же объем данных может быть отправлен меньшим оборудованием в космосе и на земле. И наоборот, существующие антенны DSN могут разделить время между большим количеством миссий. На момент запуска в DSN было небольшое количество Kа приемники установлены на опытной основе; Kа операции и миссии увеличиваются.
SDST позже использовался в других космических миссиях, таких как Марсианская научная лаборатория (марсоход Любопытство ).[11]
PEPE
Достигнув цели, DS1 определяет среду частиц с помощью прибора PEPE (Plasma Experiment for Planetary Exploration). Этот прибор измерял поток ионов и электронов в зависимости от их энергии и направления. Состав ионов определялся с помощью времяпролетный масс-спектрометр.
MICAS
MICAS (миниатюрная интегрированная камера и Спектрометр ) прибор объединил визуализацию в видимом свете с инфракрасной и ультрафиолетовой спектроскопией для определения химического состава. Все каналы имеют общий телескоп 10 см (3,9 дюйма), в котором используется Карбид кремния зеркало.
И PEPE, и MICAS были похожи по своим возможностям на более крупные инструменты или наборы инструментов на других космических кораблях. Они были меньше по размеру и потребляли меньше энергии, чем те, что использовались в предыдущих миссиях.
Обзор миссии


Глубокий космос 1 · 9969 Брайля · земной шар · 19P / Borrelly
Перед запуском Глубокий космос 1 был предназначен для посещения кометы 76P / West – Kohoutek – Ikemura и астероид 3352 McAuliffe.[12] Из-за отложенного запуска цели поменяли на астероид. 9969 Брайля (в то время называлась 1992 KD) и комета 107P / Wilson – Harrington.[12] Он достиг нарушенного пролета шрифта Брайля и из-за проблем со звездным трекером был перенаправлен на полет кометы. 19P / Borrelly, который прошел успешно.[13] Пролет астероида в августе 2002 г. 1999 KK1 поскольку рассматривалась еще одна расширенная миссия, но в конечном итоге не была продвинута из-за соображений стоимости.[14][15] Во время миссии высококачественные инфракрасные спектры Марс тоже были взяты.[13][16]
Результаты и достижения
Первоначально ионный силовой двигатель вышел из строя через 4,5 минуты работы. Однако позже он был восстановлен и отлично работал. В начале миссии материал, выброшенный во время отделения ракеты-носителя, вызвал короткое замыкание близко расположенных решеток вывода ионов. Загрязнение в конечном итоге было устранено, поскольку материал был разрушен электрической дугой, сублимирован за счет выделения газа или просто позволил уйти. Это было достигнуто путем многократного перезапуска двигателя в режиме ремонта двигателя с образованием дуги на захваченном материале.[17]
Считалось, что выхлоп ионного двигателя может мешать работе других систем космического корабля, таких как радиосвязь или научные инструменты. Детекторы PEPE имели второстепенную функцию для отслеживания таких эффектов от двигателя. Никаких помех обнаружено не было.
Еще одной неудачей стала потеря звездный трекер. Звездный трекер определяет ориентацию космического корабля, сравнивая звездное поле с его внутренними картами. Миссия была сохранена, когда камера MICAS была перепрограммирована, чтобы заменить звездный трекер. Хотя MICAS более чувствителен, его поле зрения на порядок меньше, что создает большую нагрузку на обработку информации. По иронии судьбы, звездный трекер был стандартным компонентом, который должен был быть очень надежным.[13]
Без работающего звездного трекера продвижение ионов было временно приостановлено. Потеря времени тяги вынудила отменить пролет кометы. 107P / Wilson – Harrington.
Система Autonav время от времени требовала корректировок вручную. Большинство проблем заключались в идентификации объектов, которые были слишком тусклыми или которые было трудно идентифицировать из-за того, что более яркие объекты вызывали дифракционные пики и отражения в камере, в результате чего Autonav неправильно определял цели.
Система удаленного агента была представлена с тремя смоделированными отказами на космическом корабле и правильно обработала каждое событие.
- неисправный блок электроники, который Remote Agent устранил, повторно активировав блок.
- неисправный датчик, предоставляющий ложную информацию, которую Удаленный агент распознал как ненадежную и, следовательно, правильно проигнорировал.
- двигатель управления ориентацией (небольшой двигатель для управления ориентацией космического корабля) застрял в положении «выключено», что Удаленный агент обнаружил и скомпенсировал, переключившись в режим, который не зависел от этого двигателя.
В целом это стало успешной демонстрацией полностью автономного планирования, диагностики и восстановления.
Инструмент MICAS оказался удачным по конструкции, но ультрафиолетовый канал вышел из строя из-за неисправности электрической части. Позже в миссии, после отказа звездного трекера, MICAS также взял на себя эту обязанность. Это привело к постоянным перебоям в его использовании в научных целях во время оставшейся миссии, включая встречу с кометой Боррелли.[18]


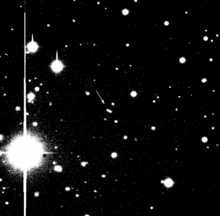
Пролет астероида 9969 Брайля был лишь частичным успехом. Глубокий космос 1 был предназначен для выполнения облета со скоростью 56 000 км / ч (35 000 миль в час) всего в 240 м (790 футов) от астероида. Из-за технических трудностей, в том числе из-за сбоя программного обеспечения незадолго до подхода, аппарат прошел мимо Брайля на расстоянии 26 км (16 миль). Это плюс нижний альбедо, означало, что астероид был недостаточно ярким для Autonav, чтобы сфокусировать камеру в нужном направлении, и съемка была отложена почти на час.[13] Получившиеся изображения были удручающе нечеткими.
Однако пролет кометы Боррелли был большим успехом и дал чрезвычайно подробные изображения поверхности кометы. Такие изображения были более высокого разрешения, чем предыдущие изображения кометы - Комета Галлея, взятый Джотто космический корабль. Инструмент PEPE сообщил, что поля кометы были смещены от ядра. Считается, что это связано с испусканием струй, которые неравномерно распределялись по поверхности кометы.
Несмотря на отсутствие щитов от обломков, космический корабль пережил пролет кометы целым и невредимым. И снова редкие струи комет, похоже, не указывали на космический корабль. Глубокий космос 1 затем перешел на второй этап расширенной миссии, посвященный повторному тестированию аппаратных технологий космического корабля. Основное внимание на этом этапе миссии уделялось системам ионных двигателей. В конечном итоге у космического корабля закончились гидразин топливо для двигателей управления ориентацией. В высокоэффективном ионном двигателе оставалось достаточное количество топлива для управления ориентацией в дополнение к главной силовой установке, что позволило продолжить миссию.[18]
В конце октября - начале ноября 1999 г., во время фазы полета космического корабля на побережье после столкновения с шрифтом Брайля, Глубокий космос 1 наблюдал Марс со своим прибором MICAS. Хотя это был очень далекий пролет, прибору удалось снять несколько инфракрасных спектров планеты.[13][16]
Текущее состояние
Глубокий космос 1 удалось выполнить свои основные и второстепенные задачи, предоставив ценные научные данные и изображения. Ионные двигатели DS1 были остановлены 18 декабря 2001 г. примерно в 20:00:00 по всемирному координированному времени, что означало окончание миссии. Бортовая связь должна была оставаться в активном режиме на случай, если корабль понадобится в будущем. Однако попытки возобновить контакт в марте 2002 года не увенчались успехом.[18] Он остается в Солнечной системе на орбите вокруг Солнца.[2]
Статистика
- Стартовая масса: 486 кг (1071 фунт)
- Сухая масса: 373 кг (822 фунта)
- Топливо: 31 кг (68 фунтов) гидразин для двигателей управления ориентацией; 82 кг (181 фунт) ксенон для ионного двигателя NSTAR[1]
- Мощность: 2500 Вт, из которых 2100 Вт питает ионный двигатель.
- Генеральный подрядчик: Спектр Астро, позже приобретенный Общая динамика, а позже продан Корпорация орбитальных наук
- Ракета-носитель: Боинг Дельта II 7326
- Сайт запуска: Мыс Канаверал База ВВС Космический стартовый комплекс 17А
- Общая стоимость: 149,7 млн. Долларов США
- Стоимость разработки: 94,8 млн долларов США
- Персонал:
- Руководитель проекта: Дэвид Леман
- Менеджер миссии: Филип Варгезе
- Главный инженер миссии и заместитель руководителя миссии: Марк Рэйман
- Ученый проекта: Роберт Нельсон
Смотрите также
- Солнечные батареи на космических кораблях
- Список малых планет и комет, посещенных космическими кораблями
Рекомендации
- ^ а б c d е ж "Облет астероида из Deep Space 1" (PDF) (Пресс-кит). НАСА. 26 июля 1999 г.. Получено 20 ноября 2016.
- ^ а б c d е «Глубокий космос 1». Национальный центр данных по космической науке. НАСА. Получено 20 ноября 2016.
- ^ Сиддики, Асиф А. (2018). За пределами Земли: Хроника исследования глубокого космоса, 1958–2016 гг. (PDF). Серия истории НАСА (2-е изд.). НАСА. п. 2. ISBN 978-1-62683-042-4. LCCN 2017059404. СП-2018-4041.
- ^ «Передовые технологии». НАСА / Лаборатория реактивного движения. Получено 20 ноября 2016.
- ^ Bhaskaran, S .; и другие. (2000). Автономная навигационная система Deep Space 1: анализ после полета. Конференция специалистов по астродинамике AIAA / AAS. 14-17 августа 2000 г. Денвер, Колорадо. CiteSeerX 10.1.1.457.7850. Дои:10.2514/6.2000-3935. AIAA-2000-3935.
- ^ Мерфи, Дэвид М. (2000). The Scarlet Solar Array: проверка технологии и результаты полетов (PDF). Симпозиум по валидации технологий Deep Space 1. 8–9 февраля 2000 г. Пасадена, Калифорния. Архивировано из оригинал (PDF) 15 октября 2011 г.
- ^ а б Rayman, Marc D .; Chadbourne, Pamela A .; Калвелл, Джеффри С .; Уильямс, Стивен Н. (август – ноябрь 1999 г.). "Mision Design for Deep Space 1: Миссия по проверке технологий малой тяги" (PDF). Acta Astronautica. 45 (4–9): 381–388. Bibcode:1999AcAau..45..381R. Дои:10.1016 / S0094-5765 (99) 00157-5. Архивировано из оригинал (PDF) 9 мая 2015 г.
- ^ "Рассвет: Космический корабль". НАСА / Лаборатория реактивного движения. Получено 20 ноября 2016.
- ^ «Удаленный агент». НАСА. Архивировано из оригинал 13 апреля 2010 г.. Получено 22 апреля 2009.
- ^ а б Гаррет, Рон (14 февраля 2012 г.). Эксперимент с удаленным агентом: отладка кода на расстоянии 60 миллионов миль. YouTube.com. Google Tech Talks. Слайды.
- ^ Маковский, Андре; Илотт, Питер; Тейлор, Джим (ноябрь 2009 г.). "Проектирование систем связи лаборатории Mars Science" (PDF). Серия сводок по дизайну и характеристикам. НАСА / Лаборатория реактивного движения. Цитировать журнал требует
| журнал =(помощь) - ^ а б "Кометные космические миссии". SEDS.org. Получено 20 ноября 2016.
- ^ а б c d е Rayman, Marc D .; Варгезе, Филипп (март – июнь 2001 г.). «Расширенная миссия Deep Space 1» (PDF). Acta Astronautica. 48 (5–12): 693–705. Bibcode:2001AcAau..48..693R. Дои:10.1016 / S0094-5765 (01) 00044-3. Архивировано из оригинал (PDF) 9 мая 2009 г.
- ^ Шактман, Ноа (18 декабря 2001 г.). «Конец линии для зонда НАСА». Проводной. Архивировано из оригинал 17 июня 2008 г.
- ^ Рэйман, Марк (18 декабря 2001 г.). «Обновление миссии». Журнал миссии доктора Марка Рэймана. НАСА / Лаборатория реактивного движения. Архивировано из оригинал 13 августа 2009 г.
- ^ а б "Deep Space 1: Информация о миссии". НАСА. 29 сентября 2003 г.. Получено 20 ноября 2016.
- ^ Rayman, Marc D .; Варгезе, Филипп; Lehman, David H .; Livesay, Лесли Л. (июль – ноябрь 2000 г.). «Результаты миссии по валидации технологии Deep Space 1» (PDF). Acta Astronautica. 47 (2–9): 475–487. Bibcode:2000AcAau..47..475R. CiteSeerX 10.1.1.504.9572. Дои:10.1016 / S0094-5765 (00) 00087-4. Архивировано из оригинал (PDF) 15 апреля 2012 г.
- ^ а б c Рэйман, Марк Д. (2003). «Успешное завершение миссии Deep Space 1: важные результаты без яркого названия» (PDF). Космические технологии. 23 (2): 185–196.
внешняя ссылка
- Глубокий космос 1 интернет сайт НАСА / Лаборатория реактивного движения
- Глубокий космос 1 интернет сайт НАСА / Программа нового тысячелетия
- Глубокий космос 1 Энциклопедия Astronautica
- Архив миссий Deep Space 1 в Системе планетарных данных НАСА, узел малых тел
| Прошлое и Текущий |
|     | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Планируется | ||||||||||||
| Предложил |
| |||||||||||
| Отменено или не развит | ||||||||||||
| Связанный | ||||||||||||
| ||||||||||||