Марс полярный посадочный модуль - Mars Polar Lander
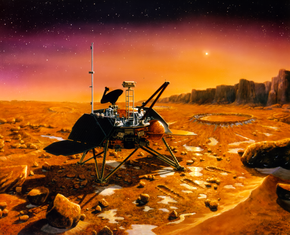 Художественное изображение марсианского полярного посадочного модуля на Марсе | |
| Имена | Марс-сюрвейер '98 |
|---|---|
| Тип миссии | Спускаемый аппарат |
| Оператор | НАСА / JPL |
| COSPAR ID | 1999-001A |
| SATCAT нет. | 25605 |
| Интернет сайт | Веб-сайт Mars Polar Lander |
| Продолжительность миссии | 334 дня |
| Свойства космического корабля | |
| Производитель | Мартин Мариетта |
| Стартовая масса | 290 килограммов (640 фунтов) |
| Мощность | 200 Вт солнечная батарея и Национальные институты здравоохранения США2 аккумулятор |
| Начало миссии | |
| Дата запуска | 20:21:10, 3 января 1999 г. (UTC) |
| Ракета | Дельта II 7425 |
| Запустить сайт | Мыс Канаверал AFS SLC-17A |
| Конец миссии | |
| Утилизация | отказ при посадке |
| Заявлено | 17 января 2000 г. |
| Последний контакт | 20:00, 3 декабря 1999 г. (UTC) |
| Марс спускаемый аппарат | |
| Дата посадки | ~ 20:15 UTC ERT, 3 декабря 1999 г. |
| Посадочная площадка | Ultimi Scopuli, 76 ° ю.ш. 195 ° з.д. / 76 ° ю.ш.195 ° з.д. (прогноз) |
 Марс-сюрвейер 98 логотип миссии | |
В Марс полярный посадочный модуль, также известный как Посадочный модуль Mars Surveyor '98, был 290-килограммовый роботизированный космический корабль спускаемый аппарат запущен НАСА 3 января 1999 г. для изучения почва и климат из Planum Australe, регион около южного полюса на Марс. Он был частью Миссия Mars Surveyor '98. Однако 3 декабря 1999 г., когда ожидалось завершение фазы спуска, посадочный модуль не смог восстановить связь с Землей. Посмертный анализ определил, что наиболее вероятной причиной аварии было преждевременное прекращение работы двигателя до того, как спускаемый аппарат коснулся поверхности, в результате чего он упал на планету с высокой скоростью.[1]
Общая стоимость Mars Polar Lander составила 165 миллионов долларов США. Разработка космического корабля обошлась в 110 миллионов долларов США, запуск оценивался в 45 миллионов долларов США, а эксплуатация миссии - в 10 миллионов долларов США.[2]
История миссии
История
В рамках Миссия Mars Surveyor '98 Посадочный модуль искали как способ сбора климатических данных с земли в сочетании с орбитальным аппаратом. НАСА подозревали, что большое количество замерзшей воды может находиться под тонким слоем пыли на южном полюсе. При планировании Марсианского полярного посадочного модуля потенциальное содержание воды на южном полюсе Марса было самым сильным определяющим фактором для выбора места посадки.[3] Компакт-диск с именами миллиона детей со всего мира был помещен на борт космического корабля в рамках программы «Отправь свое имя на Марс», призванной стимулировать интерес детей к космической программе.[4]
Основными задачами миссии были:[5]
- приземлиться на слоистой местности в южной полярной области Марса;
- поиск свидетельств, связанных с древним климатом и более поздним периодическим изменением климата;
- дать представление о текущем климате и сезонных изменениях в высоких широтах и, в частности, об обмене водяным паром между атмосферой и землей;
- поиск приповерхностных грунтовых льдов в полярных регионах и анализ почвы на предмет физически и химически связанных углекислого газа и воды; и
- поверхность исследования морфология (формы и структуры), геология, топография, и погода места посадки.
Зонды Deep Space 2
Марс Полярный спускаемый аппарат нес два небольших идентичных ударник зонды, известные как «Deep Space 2 A и B». Зонды предназначались для ударов по поверхности с высокой скоростью примерно на 73 ° ю.ш. 210 ° з.д. / 73 ° ю.ш.210 ° з. проникнуть в Марсианский грунт и изучать состав недр на глубине до метра. Однако после входа в марсианскую атмосферу попытки связаться с зондами не удались.[3]
Deep Space 2 финансировался Программа нового тысячелетия, а затраты на их разработку составили 28 миллионов долларов США.[2]
Дизайн космического корабля
Космический корабль имел ширину 3,6 метра и высоту 1,06 метра с полностью развернутыми опорами и солнечными батареями. Основание было в основном построено из алюминия. соты колода, композит графит-эпоксидная смола листы, образующие кромку, и три алюминиевые ножки. Во время посадки опоры должны были разворачиваться из походного положения с помощью пружин сжатия и поглощать силу приземления с помощью крошащихся алюминиевых сотовых вставок в каждой опоре. На палубе спускаемого аппарата небольшой термальный Клетка Фарадея в корпусе размещались компьютер, распределительная электроника и батареи, телекоммуникационная электроника и капиллярный насос. контур тепловой трубы (LHP) компоненты, поддерживающие рабочую температуру. Каждый из этих компонентов включает в себя резервные блоки на случай отказа одного из них.[3][6][7]
Контроль ориентации и движение
Во время полета на Марс этап круиза стабилизировался по трем осям четырьмя гидразин одноразовое топливо модули реактивного двигателя, каждый из которых включает 22-ньютон маневренный двигатель с коррекцией траектории для тяги и двигатель с системой управления реакцией мощностью 4 ньютона для контроль отношения (ориентация). Ориентация космического корабля производилась по резервному Датчики солнца, звездные трекеры, и инерциальные единицы измерения.[6]
Во время спуска спускаемый аппарат использовал три группы двигателей с импульсной модуляцией, каждый из которых содержал четыре двигателя на гидразиновом топливе мощностью 266 ньютонов. Высота при посадке измерялась доплеровский радар система, а подсистема управления ориентацией и артикуляцией (AACS) управляла ориентацией, чтобы обеспечить посадку космического корабля в оптимальной азимут для максимального увеличения сбора солнечной энергии и связи с посадочным модулем.[3][6][7]
Посадочный модуль был спущен на воду с двумя баками гидразина, содержащими 64 кг топлива и находящимися под давлением с помощью гелий. Каждый сферический бак располагался в нижней части спускаемого аппарата и служил топливом во время крейсерского полета и спуска.[3][6][7]
Связь
На этапе крейсерского полета связь с кораблем велась по Группа X с использованием среднего коэффициента усиления, рогообразной антенны и избыточные твердотельных усилителей мощности. На случай непредвиденных обстоятельств также была включена всенаправленная антенна с низким коэффициентом усиления.[3]
Посадочный модуль изначально предназначался для передачи данных через отказавший Марсианский климатический орбитальный аппарат через УВЧ антенна. После потери орбитального аппарата 23 сентября 1999 года посадочный модуль все еще сможет напрямую связываться с Сеть Deep Space через канал Direct-To-Earth (DTE), диапазон X, управляемый, со средним усилением, параболическая антенна расположен на палубе. В качестве альтернативы, Mars Global Surveyor может использоваться в качестве ретранслятора с использованием антенны УВЧ несколько раз каждый марсианский день. Однако сеть Deep Space Network могла только получать данные от посадочного модуля, а не отправлять им команды, используя этот метод. Антенна со средним усилением, направленная прямо на Землю, обеспечивала скорость 12,6 кбит / с. обратный канал Релейный тракт УВЧ обеспечивал обратный канал со скоростью 128 кбит / с. Связь с космическим кораблем будет ограничена одночасовыми событиями, связанными с тепловыделением в усилителях. Количество коммуникационных событий также будет ограничено ограничениями мощности.[3][5][6][7]
Мощность
Круизный этап включал два арсенид галлия солнечные батареи для питания радиосистемы и поддержания питания батарей в посадочном модуле, которые согревали определенную электронику.[3][6]
После спуска на поверхность посадочный модуль должен был развернуть две солнечные батареи из арсенида галлия шириной 3,6 метра, расположенные по обе стороны от космического корабля. Еще две вспомогательные солнечные батареи были расположены сбоку, чтобы обеспечить дополнительную мощность в общей сложности на 200 Вт и примерно от восьми до девяти часов работы в день.[3][6]
Хотя Солнце не зашло бы за горизонт во время основной миссии, слишком мало света достигло бы солнечных батарей, чтобы оставаться достаточно теплым для того, чтобы определенная электроника могла продолжать работать. Чтобы избежать этой проблемы, 16-амперный час никель-водородный аккумулятор был включен для подзарядки днем и для питания нагревателя теплового кожуха ночью. Ожидалось, что это решение ограничит срок службы спускаемого аппарата. Поскольку марсианские дни станут холоднее в конце лета, на обогреватель будет подаваться слишком мало энергии, чтобы избежать замерзания, в результате чего замерзнет батарея и сигнализирует об окончании срока службы посадочного модуля.[3][6][7]
Научные инструменты
- Научные инструменты

Спускаемый имидж-сканер на Марс

Стерео имидж-сканер поверхности

ЛИДАР

Роботизированная рука

Камера с роботизированной рукой

Метеорологический пакет

Анализатор термических и выделенных газов

Микрофон Марса








- Изображения космического корабля

Аннотированная схема космического корабля Mars Polar Lander

Космический корабль в походном положении непосредственно перед герметизацией.

Испытания проведены в Цехе сборки и герметизации космических аппаратов.

В Марс полярный посадочный модуль капсюля, непосредственно перед установкой на Звезда 48 верхняя ступень




- Спускаемый имидж-сканер на Марс (МАРДИ)
- Установленная на дне посадочного модуля камера должна была сделать 30 снимков при спуске космического корабля на поверхность. Полученные изображения будут использоваться для обеспечения географического и геологического контекста района посадки.[8]
- Surface Stereo Imager (SSI)
- Используя пару устройства с зарядовой связью (CCD), стерео панорамная камера был установлен на мачте высотой один метр и помогал анализатору термически выделяемых газов определять области, представляющие интерес для манипулятора. Кроме того, камера будет использоваться для оценки плотности столба атмосферной пыли, оптической толщины аэрозоли и содержание водяного пара в наклонных столбах с использованием узкополосных изображений Солнца.[9]
- Обнаружение света и дальность (ЛИДАР)
- Лазерный зонд был предназначен для обнаружения и определения характеристик аэрозолей в атмосфере на высоте до трех километров над посадочным модулем. Инструмент работал в двух режимах: активный режим, используя входящий в комплект лазерный диод, и акустический режим, используя Солнце в качестве источника света для датчика. В активном режиме лазерный эхолот должен был испускать 100-наносекундные импульсы на длине волны 0,88 микрометра в атмосферу, а затем регистрировать время для обнаружения света, рассеянного аэрозолями. Время, необходимое для возвращения света, можно затем использовать для определения количества льда, пыли и других аэрозолей в регионе. В акустическом режиме прибор измеряет яркость неба, освещенного Солнцем, и регистрирует рассеяние света, когда он проходит к датчику.[10]
- Роботизированная рука (РА)
- Роботизированный манипулятор, расположенный в передней части посадочного модуля, представлял собой метровую алюминиевую трубку с локтевым шарниром и шарнирным совком, прикрепленным к концу. Ковш предназначался для закапывания почвы в непосредственной близости от спускаемого аппарата. Затем почву можно было проанализировать в совке с помощью камеры-манипулятора или перенести в анализатор термического выделяемого газа.[9]
- Камера с роботизированной рукой (RAC)
- Камера с зарядовой связью, расположенная на манипуляторе робота, включала две красные, две зеленые и четыре синих лампы для освещения образцов почвы для анализа.[9]
- Метеорологический пакет (MET)
- В пакет было включено несколько инструментов, связанных с зондированием и записью погодных условий. Датчики ветра, температуры, давления и влажности располагались на манипуляторе робота и двух выдвижных мачтах: 1,2-метровой. главная мачта, расположенный в верхней части посадочного модуля, и вторичный 0,9-метровый субмачта который будет развернут вниз для получения измерений близко к земле.[9]
- Анализатор термических и выделенных газов (TEGA)
- Инструмент предназначался для измерения содержания воды, водяного льда, адсорбированного углекислого газа, кислорода и летучих минералов в поверхностных и подземных образцах почвы, собранных и перенесенных роботизированной рукой. Материалы, помещенные на решетку внутри одной из восьми печей, будут нагреваться и испаряться до 1000 ° C. Затем анализатор выделенных газов будет записывать измерения, используя спектрометр и электрохимический ячейка. Для калибровки пустая печь также будет нагреваться во время этого процесса для дифференциального сканирования. калориметрия. Разница в энергии, необходимой для нагрева каждой печи, будет указывать на концентрацию водяного льда и других минералов, содержащих воду или двуокись углерода.[9]
- Микрофон Марса
- Микрофон был задуман как первый инструмент для записи звуков на другой планете. В основном состоит из микрофона, обычно используемого с слуховые аппараты Предполагалось, что прибор будет записывать звуки падающей пыли, электрических разрядов и звуки работающего космического корабля с использованием 12-битных выборок продолжительностью 2,6 или 10,6 секунды.[11] Микрофон был построен с использованием стандартных деталей, включая Sensory, Inc. Интегральная схема RSC-164 обычно используется в устройствах распознавания речи.[12]
Профиль миссии
| Хронология наблюдений | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Запуск и траектория
Марс полярный посадочный модуль был запущен 3 января 1999 г. в 20:21:10 UTC Национальное управление по аэронавтике и исследованию космического пространства от Космический стартовый комплекс 17Б на Мыс Канаверал База ВВС во Флориде, на борту Дельта II 7425 ракета-носитель. Полная последовательность записи длилась 47,7 минут после Тиокол Звезда 48 Твердотопливный ускоритель третьей ступени B вывел космический аппарат на 11-месячную траекторию перехода к Марсу с конечной скоростью 6,884 километра в секунду по отношению к Марсу. Во время полета космический корабль размещался внутри ракушка капсула и сегмент, известный как круизный этап обеспечивал питание и связь с Землей.[3][5][6]

Схема конфигурации запуска.

Стартовая фотография Mars Polar Lander на борту ракеты-носителя Delta II.

Схема межпланетной траектории марсианского полярного посадочного модуля.



Зона приземления
Зона приземления цели находилась в районе Южный полюс Марса, называемый Ultimi Scopuli, потому что в нем было много скопули (дольчатый или нерегулярный уступы ).[нужна цитата ]
Попытка посадки



3 декабря 1999 г. Марс полярный посадочный модуль столкнулся с Марсом, когда операторы миссии начали подготовку к посадке. В 14:39:00 UTC начался круизный этап. выброшен за борт, начав плановое отключение связи до тех пор, пока космический корабль не коснется поверхности. За шесть минут до входа в атмосферу запрограммированный запуск 80-секундного двигателя повернул космический корабль в правильную ориентацию входа в атмосферу. тепловой экран ориентирован на поглощение тепла 1650 ° C, которое будет выделяться при прохождении спускаемой капсулы через атмосферу.
Двигаясь со скоростью 6,9 км / с, входная капсула вошла в Марсианская атмосфера в 20:10:00 UTC и должна была приземлиться в районе 76 ° ю.ш. 195 ° з.д. / 76 ° ю.ш.195 ° з.д. в регионе, известном как Planum Australe. Ожидалось, что связь с космическим кораблем будет восстановлена в 20:39:00 UTC после приземления. Однако связь с космическим кораблем не была возможна, и посадочный модуль был объявлен потерянным.[3][5][6]
25 мая 2008 г. Феникс посадочный модуль прибыл на Марс и впоследствии выполнил большинство задач Марс полярный посадочный модуль, владеющих несколькими одинаковыми или производными инструментами.

Предполагаемые операции
Двигаясь со скоростью примерно 6,9 км / с и 125 км над поверхностью, космический корабль вошел в атмосферу и сначала замедлился с помощью 2,4-метрового. абляция тепловой экран, расположенный в нижней части корпуса ввода, чтобы аэротормоз через 116 километров атмосферы. Через три минуты после входа космический корабль замедлился до 496 метров в секунду, сигнализируя 8,4-метровый полиэстер парашют для развертывания из миномета с последующим немедленным разделением теплозащитного экрана и включением MARDI на высоте 8,8 км над поверхностью. Парашют еще больше снизил скорость космического корабля до 85 метров в секунду, когда наземный радар начал отслеживать особенности поверхности, чтобы определить наилучшее возможное место посадки.
Когда космический корабль замедлился до 80 метров в секунду, через одну минуту после раскрытия парашюта, посадочный модуль отделился от корпуса и начал спуск с двигателем, находясь на высоте 1,3 км. Ожидается, что механический спуск продлится примерно одну минуту, и космический корабль поднимется на 12 метров над поверхностью. Затем двигатели были выключены, и космический корабль должен был упасть на поверхность и приземлиться в 20:15:00 по всемирному координированному времени около 76 ° ю.ш.195 ° з.д. в Planum Australe.[3][5][6][7]
Операции по посадке должны были начаться через пять минут после приземления, сначала развернуть уложенные солнечные батареи, а затем направить антенну со средним усилением, направленную прямо на Землю, чтобы обеспечить первую связь с Сеть Deep Space. В 20:39 по всемирному координированному времени на Землю должна была транслироваться 45-минутная передача, в которой будут передаваться ожидаемые 30 изображений посадки, полученные MARDI, и сигнализировать об успешной посадке. Затем посадочный модуль отключается на шесть часов, чтобы батареи могли зарядиться. В последующие дни приборы космического корабля будут проверены операторами, а научные эксперименты должны начаться 7 декабря и продлиться как минимум в течение следующих 90 лет. Марсианские соли, с возможностью продления миссии.[3][5][6][7]
Потеря связи
3 декабря 1999 г. в 14:39:00 UTC последний телеметрия от Марс полярный посадочный модуль был отправлен непосредственно перед разделением ступеней круиза и последующим входом в атмосферу. Дальнейших сигналов с космического корабля не поступало. Попытки предпринять Mars Global Surveyor сфотографировать район, в котором предположительно находится спускаемый аппарат. Был виден объект, который предположительно был посадочным модулем. Однако последующая визуализация, выполненная Марсианский разведывательный орбитальный аппарат привело к исключению выявленного объекта. Марс полярный посадочный модуль остается потерянным.[13][14]
Причина потери связи неизвестна. Однако Комиссия по рассмотрению отказов пришла к выводу, что наиболее вероятной причиной аварии была ошибка программного обеспечения, которая неправильно определила вибрации, вызванные развертыванием убранных опор, как приземление на поверхности.[15] В результате космический корабль отключил спускаемые двигатели, хотя, вероятно, на высоте 40 метров над поверхностью. Хотя было известно, что развертывание опоры может создать ложную индикацию, инструкции по разработке программного обеспечения не учитывали эту возможность.[16]
В дополнение к преждевременному отключению спускаемых двигателей Комиссия по рассмотрению отказов также оценила другие возможные виды отказов.[1] В отсутствие существенных доказательств характера отказа нельзя исключить следующие возможности:
- состояние поверхности превышает возможности конструкции для посадки;
- потеря управления из-за динамических воздействий;
- место посадки не выживает;
- посадочный модуль с контактами корпуса / парашюта;
- потеря управления из-за смещения центра масс; или
- теплозащитный экран выходит из строя из-за микрометеороид влияние.
Авария Mars Polar Lander произошла через два с половиной месяца после потери корабля. Марсианский климатический орбитальный аппарат. Недостаточное финансирование и плохое управление были названы основными причинами неудач.[17] По словам Томаса Янга, председателя группы независимой оценки программы Mars, программа «финансировалась не менее чем на 30%».[18]
| Цитата из отчета[1] |
|---|
«Магнитный датчик предусмотрен в каждой из трех посадочных опор, чтобы определять касание, когда спускаемый аппарат касается поверхности, инициируя отключение спускаемых двигателей. Данные испытаний развертывания инженерных разработок MPL, испытаний развертывания летных модулей MPL и развертывания Mars 2001 испытания показали, что ложная индикация приземления происходит в Эффект Холла датчик приземления при раскрытии посадочной опоры (пока спускаемый аппарат подсоединен к парашюту). Программная логика принимает этот переходный сигнал как действительное событие касания, если он сохраняется в течение двух последовательных считываний датчика. Тесты показали, что большинство переходных сигналов при развертывании участка действительно достаточно продолжительны, чтобы их можно было принять как действительные события, поэтому почти наверняка по крайней мере один из трех сгенерировал бы ложную индикацию приземления, которую программное обеспечение приняло как действительное . Программное обеспечение, предназначенное для игнорирования индикации приземления до включения логики обнаружения приземления, не было реализовано должным образом, и ложная индикация приземления была сохранена. Логика обнаружения приземления активируется на высоте 40 метров, и в это время программное обеспечение должно было бы выдать прекращение тяги двигателя снижения в ответ на (ложную) индикацию приземления. На высоте 40 метров посадочный модуль имеет скорость примерно 13 метров в секунду, которая, при отсутствии тяги, ускоряется гравитацией Марса до скорости удара поверхности примерно 22 метра в секунду (номинальная скорость приземления составляет 2,4 метра в секунду). второй). При такой скорости удара посадочный модуль не смог бы выжить ». |
Смотрите также
- Посадочный модуль Mars Surveyor 2001, посадочный модуль аналогичной конструкции, миссия отменена. Посадочный модуль, используемый для Phoenix.
- Феникс спускаемый аппарат, 2008
- Исследование Марса
- ЭкзоМарс марсоход
- Список миссий на Марс
- Марсианская научная лаборатория марсоход
использованная литература
- ^ а б c «Отчет о потере миссий Mars Polar Lander и Deep Space 2» (PDF). Лаборатория реактивного движения. 22 марта 2000 г. Архивировано с оригинал (PDF) на 2009-10-27.
- ^ а б «Затраты на полет на полярный посадочный модуль на Марс». Ассошиэйтед Пресс. 8 декабря 1999 г.. Получено 2020-09-30.
- ^ а б c d е ж г час я j k л м п "Пресс-кит о полетах на Марс 1998 г." (PDF) (Пресс-релиз). НАСА. 1998. Получено 2011-03-12.
- ^ Ха, Бен (3 марта 1998 г.). "Детские имена отправляются на Марс". Часовой Солнца. Получено 2013-05-30.
- ^ а б c d е ж "Пресс-кит Марс Полярный спускаемый аппарат / Deep Space 2" (PDF) (Пресс-релиз). НАСА. 1999 г.. Получено 2011-03-12.
- ^ а б c d е ж г час я j k л «Марс Полярный спускаемый аппарат». НАСА / Национальный центр данных по космическим наукам. Получено 2011-03-12.
- ^ а б c d е ж г "MPL: Описание полетной системы посадочного модуля". НАСА / Лаборатория реактивного движения. 1998. Архивировано с оригинал на 2011-07-21. Получено 2011-03-12.
- ^ "Визуализатор спуска на Марс (MARDI)". НАСА / Национальный центр данных по космическим наукам. Получено 2011-03-17.
- ^ а б c d е "Марсианский летучий и климатический исследователь (MVACS)". НАСА / Национальный центр данных по космическим наукам. Получено 2011-03-17.
- ^ «Обнаружение света и дальность (ЛИДАР)». НАСА / Национальный центр данных по космическим наукам. Получено 2011-03-17.
- ^ «Марс микрофон». НАСА / Национальный центр данных по космическим наукам. Получено 2011-03-17.
- ^ «Проекты: Планетарные микрофоны - Марсианский микрофон». Планетарное общество. Архивировано из оригинал 18 августа 2006 г.
- ^ Редакция (6 мая 2005 г.). "Марсианский полярный посадочный модуль наконец-то найден?". Небо и телескоп. Архивировано из оригинал на 2008-07-23. Получено 2009-04-22.CS1 maint: дополнительный текст: список авторов (ссылка на сайт)
- ^ "Выпуск № MOC2-1253: Марсианский полярный посадочный модуль НЕ найден". Mars Global Surveyor / Mars Orbiter Camera. НАСА / Лаборатория реактивного движения / Малинские космические научные системы. 17 октября 2005 г. Архивировано с оригинал на 2008-12-07. Получено 2009-04-22.
- ^ НАСА 3: Провалы миссии. YouTube.
- ^ Нэнси Г. Левесон. «Роль программного обеспечения в недавних авиакосмических авариях» (PDF). Цитировать журнал требует
| журнал =(Помогите) - ^ Томас Янг (14 марта 2000 г.). «Сводный отчет группы независимой оценки программы Mars». Проект № 7 13.03.00. Комитет по науке и технологиям Дома. Получено 2009-04-22. Цитировать журнал требует
| журнал =(Помогите) - ^ Джеффри Кэй (14 апреля 2000 г.). "НАСА в горячем положении" (стенограмма). NewsHour с Джимом Лерером. PBS. Получено 2009-04-22.
дальнейшее чтение
- "Mars Polar Lander (1999-001A)". Главный каталог NSSDC. НАСА. 2001 г.. Получено 2009-04-22.
- Майкл С. Малин (июль 2005 г.). "Скрытый на виду: поиск марсианских приземлений". Небо и телескоп. 110 (7): 42–46. ISSN 0037-6604.
- "Пресс-кит: миссии на Марс 1998 г." (.PDF) (Пресс-релиз). Национальное управление по аэронавтике и исследованию космического пространства. 8 декабря 1998 г.. Получено 2009-04-22.
внешние ссылки
- Сайт Mars Polar Lander в Лаборатория реактивного движения
- Миссия полярного посадочного модуля на Марс на домашней странице NASA Solar System Exploration


