Марсоход для исследования Марса - Mars Exploration Rover
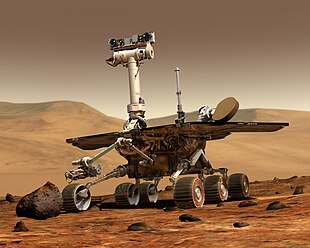
НАСА с Марсоход для исследования Марса (MER) миссия была роботизированная космическая миссия с участием двух Марсоходы, Дух и Возможность исследование планеты Марс. Все началось в 2003 году с запуска двух вездеходы исследовать поверхность Марса и геология; Оба марсохода приземлились на Марсе в разных местах в январе 2004 года. Оба марсохода далеко пережили свои запланированные миссии из 90 Марсианские солнечные дни: MER-A Дух был активен до 22 марта 2010 г.,[1] а МЕР-Б Возможность был активен до 10 июня 2018 г.[2]
Цели
Научная цель миссии состояла в том, чтобы найти и охарактеризовать широкий спектр горные породы и почвы которые содержат ключи к прошлой активности воды на Марсе. Миссия является частью НАСА Программа исследования Марса, который включает в себя три предыдущих успешных лендинга: два Программа викингов посадочных мест в 1976 г. и Марс-следопыт зонд в 1997 году.[3]
Общая стоимость строительства, запуска, посадки и эксплуатации марсоходов на поверхности для начальных 90-соль Основная миссия составила 820 миллионов долларов США.[4] Каждый марсоход получил пять продлений миссии, поскольку они продолжали функционировать после первоначально запланированной продолжительности. Пятое продление миссии было предоставлено в октябре 2007 года и продлилось до конца 2009 года.[4][5] Общая стоимость первых четырех продлений миссии составила 104 миллиона долларов, а пятого продления миссии стоила не менее 20 миллионов долларов.[4]
В июле 2007 года, во время четвертого продления миссии, марсианские пыльные бури блокировали солнечный свет для марсоходов и угрожали способности корабля собирать энергию с их помощью. солнечные панели, заставляя инженеров опасаться, что один или оба из них могут быть навсегда отключены. Однако пылевые бури утихли, что позволило им возобновить работу.[6]
1 мая 2009 г., во время пятого продления миссии, Дух застрял в мягкой почве.[7] После почти девяти месяцев попыток вернуть марсоход на правильный путь, в том числе с использованием тестовых марсоходов на Земле, 26 января 2010 года НАСА объявило, что Дух был повторно задан как стационарная научная платформа. Этот режим позволит Дух чтобы помочь ученым способами, которые мобильная платформа не могла, например, обнаруживая "колебания "во вращении планеты, что указывало бы на жидкое ядро.[8] Лаборатория реактивного движения (JPL) потеряла связь с Spirit после последнего разговора с марсоходом 22 марта 2010 г., и продолжающиеся попытки восстановить связь продолжались до 25 мая 2011 г., в результате чего затраченное время миссии составило 6 лет 2 месяца 19 дней, или более чем в 25 раз превышает первоначально запланированную продолжительность миссии.[9]
В знак признания огромного количества научная информация накоплено обоими марсоходами, два астероиды в их честь названы: 37452 Дух и 39382 Возможность. Миссия управляется НАСА посредством Лаборатория реактивного движения, которая спроектировала, построила и эксплуатирует марсоходы.
24 января 2014 года НАСА сообщило, что текущие исследования оставшихся марсоход Возможность а также более новым Марсианская научная лаборатория марсоход Любопытство теперь будет искать свидетельства древней жизни, в том числе биосфера на основе автотрофный, хемотрофный и / или хемолитоавтотрофный микроорганизмы, а также древняя вода, в том числе флювио-озерные среды (равнины связанных с древними реками или озерами), которые могли быть обитаемый.[10][11][12][13] Поиск доказательств обитаемость, тафономия (относится к окаменелости ), и органический углерод на планете Марс затем был переведен на первичный НАСА цель.[10]
Научные цели миссии Mars Exploration Rover заключались в следующем:[14]
- Найдите и охарактеризуйте различные камни и почвы, которые содержат ключи к прошлому. воды Мероприятия. В частности, искомые образцы включают те, которые содержат минералы, отложенные в результате связанных с водой процессов, таких как осадки, испарение, осадочная цементация, или же гидротермальная деятельность.
- Определите распределение и состав минералов, горных пород и почв, окружающих места посадки.
- Что определить геологические процессы сформировали местность и повлияли на химию. Такие процессы могут включать водную или ветровую эрозию, седиментацию, гидротермальные механизмы, вулканизм и образование кратеров.
- Выполните калибровку и подтверждение приземных наблюдений, выполненных Марсианский разведывательный орбитальный аппарат инструменты. Это поможет определить точность и эффективность различных инструментов, которые исследуют геологию Марса с орбиты.
- Поиск железосодержащих минералов, а также определение и количественная оценка относительных количеств определенных типов минералов, которые содержат воду или образовались в воде, например, железосодержащие карбонаты.
- Охарактеризуйте минералогия и текстуры горных пород и почв, чтобы определить процессы, которые их создали.
- Поиск геологических ключей к условиям окружающей среды, существовавшим при наличии жидкой воды.
- Оцените, способствует ли эта среда жизни.
История


В MER-A и MER-B Зонды были запущены 10 июня 2003 г. и 7 июля 2003 г. соответственно. Хотя оба зонда были запущены Боинг Дельта II 7925-9,5 ракет из Космический стартовый комплекс 17 мыса Канаверал (CCAFS SLC-17), MER-B находился на тяжелой версии этой ракеты-носителя, и ему требовалась дополнительная энергия для Трансмарсианская инъекция. Ракеты-носители были размещены на площадках рядом друг с другом,[15] с MER-A на CCAFS SLC-17A и MER-B на CCAFS SLC-17B. Двойные площадки позволяли работать в 15- и 21-дневные периоды планетарного запуска близко друг к другу; последний возможный день запуска MER-A был 19 июня 2003 г., а первым днем MER-B был 25 июня 2003 г. НАСА с Запустить программу обслуживания удалось запустить оба космических корабля.

Зонды приземлились в январе 2004 г. в удаленных друг от друга экваториальных точках Марса. 21 января 2004 г. Сеть Deep Space потерял контакт с Дух, по причинам, которые первоначально считались связанными с факельным дождем над Австралия. Ровер передал сообщение без данных, но позже в тот же день пропустил еще один сеанс связи с Mars Global Surveyor. Следующий день, JPL получил звуковой сигнал от марсохода, указывающий на то, что он находится в режиме неисправности. 23 января летному составу удалось отправить марсоход. Считалось, что неисправность была вызвана ошибкой в марсоходе. флэш-память подсистема. В течение десяти дней марсоход не занимался научной деятельностью, пока инженеры обновляли его программное обеспечение и проводили испытания. Проблема исправлена переформатированием Духс флэш-память и использование программный патч чтобы избежать перегрузки памяти; Возможность также был обновлен патчем в качестве меры предосторожности. Дух вернулся к полноценной научной работе к 5 февраля.
23 марта 2004 года была проведена пресс-конференция, на которой были объявлены «основные открытия» свидетельств существования жидкой воды на поверхности Марса в прошлом. Делегация ученых показала изображения и данные, показывающие стратифицированную структуру и поперечное напластование в скалах обнажения внутри кратера в Meridiani Planum, посадочная площадка МЕР-Б, Возможность. Это говорит о том, что когда-то в этом регионе текла вода. Неравномерное распределение хлор и бром также предполагает, что это место когда-то было береговой линией соленого моря, а теперь испарилось.
8 апреля 2004 года НАСА объявило о продлении срока эксплуатации марсоходов с трех до восьми месяцев. Он немедленно предоставил дополнительное финансирование в размере 15 миллионов долларов США до сентября и 2,8 миллиона долларов США в месяц на продолжение операций. Позже в том же месяце Возможность прибыл на Кратер выносливости, примерно за пять дней проехать 200 метров. 22 сентября НАСА объявило, что продлевает срок службы марсоходов еще на шесть месяцев. Возможность должен был покинуть кратер Эндюранс, посетить его выброшенный тепловой экран и отправиться в Кратер Виктория. Дух была попытка взобраться на вершину Columbia Hills.
Поскольку два марсохода все еще функционируют нормально, НАСА позже объявило о продлении миссии на 18 месяцев до сентября 2006 года. Возможность должен был посетить «Гравированный ландшафт» и Дух должен был подняться по каменистому склону к вершине Муж Хилл. 21 августа 2005 г. Дух достигли вершины Мужского холма после 581 г. золы и путешествие 4,81 км (2,99 миль).
Дух 20 ноября 2005 г. отметила свою годовщину марсианского года (669 солей или 687 земных дней). Возможность отпраздновал свою годовщину 12 декабря 2005 года. В начале миссии ожидалось, что марсоходы не проживут дольше 90 марсианских дней. По словам водителя марсохода Криса Леже, Колумбия-Хиллз были «просто мечтой». Дух исследовал полукруглое горное образование, известное как Главная пластина. Это слоистое обнажение горной породы, которое озадачивает и волнует ученых.[16] Считается, что его породы представляют собой взрывоопасные вулканические отложения, хотя существуют и другие возможности, включая ударные отложения или отложения, переносимые ветром или водой.
Духа переднее правое колесо перестало работать 13 марта 2006 г., при этом марсоход сам двигался в МакКул Хилл. Его водители попытались затащить мертвое колесо за Spirit, но это сработало только до тех пор, пока не доехали до непроходимого песчаного участка на нижних склонах. Водители направили Дух к небольшому наклонному объекту, получившему название «Low Ridge Haven», где он провел долгую марсианскую зиму, ожидая весны и повышенных уровней солнечной энергии, подходящих для езды. В том сентябре Возможность достиг края Кратер Виктория, и Spaceflight Now сообщили, что НАСА продлило миссию двух марсоходов до сентября 2007 года.[17][18] 6 февраля 2007 г. Возможность стал первым космическим кораблем, который прошел десять километров (6,2 мили) по поверхности Марса.[19]
Возможность был готов войти в кратер Виктория со своего окуня на краю Утиного залива 28 июня 2007 года,[20] но из-за обширных пыльных бурь он был отложен до тех пор, пока пыль не рассеялась и мощность не вернулась к безопасному уровню.[21] Два месяца спустя Дух и Возможность возобновил движение после того, как сидел на корточках во время бушующих пыльных бурь, которые ограничивали солнечную энергию до уровня, который почти вызвал необратимый отказ обоих марсоходов.[22]
1 октября 2007 г.[23] обе Дух и Возможность приступили к пятому продлению миссии, которое продлило операции до 2009 года,[24] позволяя марсоходам провести пять лет, исследуя поверхность Марса, в ожидании продолжения их выживания.
26 августа 2008 г. Возможность начал свое трехдневное восхождение из кратера Виктория, опасаясь скачков мощности, подобных тем, которые наблюдались на Дух до выхода из строя его правого переднего колеса, может помешать ему покинуть воронку в случае поломки колеса. Ученый проекта Брюс Банердт также сказал: «Мы сделали все, для чего мы вошли в кратер Виктория, и даже больше». Возможность вернется на равнины, чтобы охарактеризовать огромное разнообразие горных пород Меридиани Планум, некоторые из которых, возможно, были выброшены из кратеров, таких как Виктория. Марсоход исследовал кратер Виктория с 11 сентября 2007 года.[25][26] По состоянию на январь 2009 года два марсохода вместе отправили обратно 250 000 изображений и преодолели расстояние более 21 километра (13 миль).[27]
Проехав около 3,2 км с момента выхода из кратера Виктория, Возможность впервые увидел обод Кратер Индевор 7 марта 2009 г.[28][29] Он прошел отметку 16 км (9,9 миль) по пути 1897 сол.[30] Между тем у кратера Гусева Дух был закопан глубоко в марсианский песок, как Возможность был в Чистилище Дюна в 2005 году.[31]
В ноябре 2009 г. Вашингтонский университет в Сент-Луисе Профессор Раймонд Арвидсон был назначен заместителем главного исследователя миссии MER.[32][33]
3 и 24 января 2010 г. Дух и Возможность соответственно отметили шесть лет на Марсе.[34] 26 января НАСА объявило, что Дух будет использоваться в качестве стационарной исследовательской платформы после нескольких месяцев безуспешных попыток освободить марсоход от мягкого песка.[35]
24 марта 2010 года НАСА объявило, что Возможность, у которого, по оценкам, оставшееся расстояние до кратера Индевор составляет 12 км, с момента начала своей миссии он прошел более 20 км.[36] Каждый марсоход был разработан с расчетом на дальность проезда всего 600 метров.[36] Через неделю они объявили, что Дух Возможно, он впал в спячку из-за марсианской зимы и мог не проснуться в течение нескольких месяцев.[37]
8 сентября 2010 г. было объявлено, что Возможность достигли середины 19-километрового пути между кратером Виктория и кратером Индевор.[38]
22 мая 2011 года НАСА объявило, что прекратит попытки связаться с Дух, который два года застрял в песчаной ловушке. Последняя успешная связь с марсоходом была 22 марта 2010 года. Последняя передача на марсоход произошла 25 мая 2011 года.[39]
В апреле 2013 года фотография, отправленная обратно одним из марсоходов, стала широко распространяться в социальных сетях и на новостных сайтах, таких как Reddit который, казалось, изображал человеческий пенис вырезанный в марсианской грязи.[40][41]
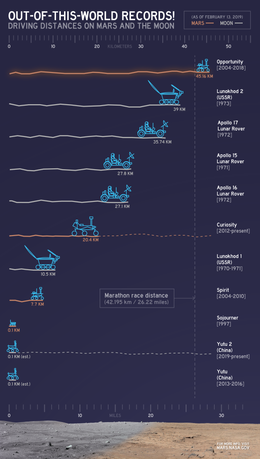
16 мая 2013 года НАСА объявило, что Возможность проехал дальше любого другого транспортного средства НАСА в мире, отличном от Земли.[42] После Возможности общая одометрия превысила 35,744 км (22,210 миль), марсоход преодолел общее расстояние, пройденное Аполлон-17 Лунный вездеход.[42]
28 июля 2014 года НАСА объявило, что Возможность проехал дальше, чем любой другой автомобиль в мире, отличном от Земли.[42][43][44] Возможность преодолел более 40 км (25 миль), преодолев общее расстояние в 39 км (24 мили), пройденное Луноход 2 луноход, предыдущий рекордсмен.[42][43]
23 марта 2015 года НАСА объявило, что Возможность проехал полные 42,2 км (26,2 мили) дистанции марафона со временем финиша примерно за 11 лет и 2 месяца.[45]
В июне 2018 г. Возможность попал в пыльную бурю глобального масштаба, и солнечные панели марсохода не смогли вырабатывать достаточно энергии, последний контакт состоялся 10 июня 2018 года. НАСА возобновило отправку команд после того, как пыльная буря утихла, но марсоход молчал, возможно из-за катастрофический отказ или слой пыли покрыл его солнечные батареи.[46]
13 февраля 2019 года состоялась пресс-конференция, после многочисленных попыток наладить контакт с Возможность без ответа с июня 2018 года, НАСА объявило Возможность миссия завершена, что также завершает 16-летнюю миссию марсохода по исследованию Марса.[47][48][49]
Дизайн космического корабля

Марсоход Mars Exploration Rover был разработан для размещения на Ракета Delta II. Каждый космический корабль состоит из нескольких компонентов:
- Ровер: 185 кг (408 фунтов)
- Посадочный модуль: 348 кг (767 фунтов)
- Кожух / парашют: 209 кг (461 фунт)
- Тепловой экран: 78 кг (172 фунта)
- Крейсерский этап: 193 кг (425 фунтов)
- Топливо: 50 кг (110 фунтов)
- Инструменты: 5 кг (11 фунтов)[50]
Общая масса составляет 1063 кг (2344 фунта).
Круизный этап

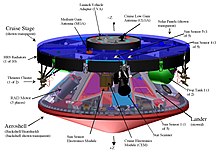
Крейсерский этап - это компонент космического корабля, который используется для путешествия с Земли на Марс. По конструкции он очень похож на Mars Pathfinder и составляет примерно 2,65 дюйма. метры (8,7 футов) дюйм диаметр и высотой 1,6 м (5,2 фута), включая въездной автомобиль (см. ниже).
Первичная конструкция выполнена из алюминия с наружным ребристым кольцом, покрытым ребрами жесткости. солнечные панели диаметром около 2,65 м (8,7 фута). Разделенные на пять секций, солнечные батареи могут обеспечить до 600 Вт мощности около Земли и 300 Вт на Марсе.
Обогреватели и многослойная изоляция держите электронику «в тепле». А фреон Система отводит тепло от бортового компьютера и коммуникационного оборудования внутри марсохода, чтобы они не перегревались. Системы круизной авионики позволяют бортовому компьютеру взаимодействовать с другой электроникой, такой как солнечные датчики, звездный сканер и обогреватели.
Звездный сканер (без резервной системы) и датчик солнца позволил космическому кораблю узнать свою ориентацию в космосе, проанализировав положение Солнца и других звезд по отношению к себе. Иногда судно могло немного отклоняться от курса; это было ожидаемо, учитывая поездку на 500 миллионов километров (320 миллионов миль). Таким образом, штурманы запланировали до шести маневров по коррекции траектории, а также проверки работоспособности.
Чтобы космический корабль прибыл на Марс в нужное место для его посадки, два легких бака с алюминиевой футеровкой несли около 31 кг (около 68 фунтов) гидразин пропеллент. Наряду с крейсерскими системами наведения и контроля топливо позволяло штурманам удерживать космический корабль на курсе. Горения и импульсные поджигания пороха допускали три типа маневров:
- Осевой ожог использует пары двигателей для изменения скорости космического корабля;
- При боковом ожоге используются две «группы двигателей» (четыре двигателя на группу) для перемещения космического корабля «в сторону» с помощью импульсов длительностью в несколько секунд;
- Запуск в импульсном режиме использует связанные пары двигателей для космических аппаратов. прецессия маневры (повороты).
Коммуникация
В космическом корабле использовался высокочастотный Группа X радио длина волны для общения, что позволило уменьшить мощность и антенны чем многие старые ремесла, которые использовали Группа S.
На круизном этапе штурманы через две антенны передавали команды: круиз антенна с низким усилением установленный внутри внутреннего кольца, а крейсерская антенна среднего усиления - во внешнем кольце. Антенна с низким усилением использовалась близко к Земле. Он является всенаправленным, поэтому мощность передачи, достигшая Земли, уменьшалась быстрее с увеличением расстояния. По мере того, как корабль приближался к Марсу, Солнце и Земля приближались в небе, если смотреть со стороны корабля, поэтому на Землю поступало меньше энергии. Затем космический корабль переключился на антенну со средним усилением, которая направила такое же количество мощности передачи в более узкий луч на Землю.
Во время полета космический корабль был спин-стабилизированный со скоростью отжима два число оборотов в минуту (об / мин). Периодические обновления заставляли антенны указывать на Землю, а солнечные панели - на Солнце.
Aeroshell

Аэрооболочка обеспечивала защитное прикрытие посадочного модуля во время семимесячного путешествия к Марсу. Вместе с посадочным модулем и вездеходом он составлял «посадочную площадку». Его основная цель заключалась в защите посадочного модуля и марсохода внутри него от сильной жары входа в тонкую марсианскую атмосферу. Он был основан на проектах Mars Pathfinder и Mars Viking.
Запчасти
Оболочка состояла из двух основных частей: тепловой экран и оболочка. Тепловой экран был плоским и коричневатым, он защищал посадочный модуль и марсоход при входе в атмосферу Марса и действовал как первый аэротормоз для космического корабля. Кожух был большим, конической формы и выкрашен в белый цвет. Он нес парашют и несколько компонентов, используемых на более поздних этапах входа, снижения и посадки, в том числе:
- Парашют (размещается внизу кожуха);
- Электроника корпуса и батареи, запускающие пиротехнические устройства, такие как разделительные гайки, ракеты и парашютный миномет;
- Инерциальный измерительный блок (IMU) Litton LN-200, который отслеживает и сообщает об ориентации кожуха, когда он качается под парашютом;
- Три больших твердотопливная ракета двигатели, называемые ракетами RAD (Rocket Assisted Descent), каждый из которых обеспечивает около тонны силы (10 килоньютон ) примерно на 60 секунд;
- Три небольшие твердотельные ракеты, называемые TIRS (смонтированные так, что они нацелены горизонтально по сторонам корпуса), которые обеспечивают небольшой горизонтальный удар по заднему корпусу, чтобы помочь ориентировать заднюю часть более вертикально во время горения основной ракеты RAD.
Сочинение
Построен Локхид Мартин Пространство в Денвере, Колорадо, аэрооболочка сделана из алюминиевой сотовой структуры, зажатой между графит-эпоксидная смола лицевые листы. Внешняя поверхность аэрозольной оболочки покрыта слоем фенольный соты. Эти соты заполнены абляционный материал (также называемый «аблятором»), который рассеивает тепло, выделяемое атмосферным трением.
Сам аблятор представляет собой уникальную смесь пробка дерево, связующее и много крошечных кремнезем стеклянные шары. Он был изобретен для теплозащитных экранов, установленных на посадочных модулях Viking Mars. Подобная технология использовалась в первых США. пилотируемые космические миссии Меркурий, Близнецы и Аполлон. Он был специально разработан для химической реакции с марсианской атмосферой во время Вход и уносят тепло, оставляя за автомобилем горячий след газа. Автомобиль замедлился с 19000 до 1600 км / ч (от 5300 до 440 м / с) примерно за минуту, производя скорость около 60 м / с.2 (6 грамм ) из ускорение на спускаемый аппарат и вездеход.
Кожух и теплозащитный экран выполнены из тех же материалов, но теплозащитный экран имеет более толстую толщину, 13 мм (1⁄2 в), слой аблятора. Вместо окраски кожух был покрыт очень тонкой алюминизированной ПЭТ пленка одеяло для защиты от холода глубокого космоса. Одеяло испарилось при входе в атмосферу Марса.
Парашют

Парашют помогал замедлить космический корабль при входе, спуске и посадке. Он расположен в кожухе.[51]
Дизайн
Конструкция парашюта 2003 года была частью долгосрочных усилий по разработке парашютных технологий Mars и основана на конструкциях и опыте миссий Viking и Pathfinder. Парашют для этой миссии на 40% больше, чем у Pathfinder, потому что самая большая нагрузка для марсохода Mars Exploration Rover составляет от 80 до 85. килоньютон (кН) или от 80 до 85 кН (от 18 000 до 19 000 фунтов силы), когда парашют полностью надувается. Для сравнения, инфляционные нагрузки Pathfinder составляли примерно 35 кН (около 8000 фунтов силы). Парашют был разработан и изготовлен в г. Южный Виндзор, Коннектикут к Pioneer Aerospace, компания, которая также разработала парашют для Звездная пыль миссия.[51]
Сочинение
Парашют изготовлен из двух прочных и легких тканей: полиэстер и нейлон. Уздечка тройная из Кевлар соединяет парашют с кожухом.
Пространство, доступное для парашюта на космическом корабле, настолько мало, что парашют приходилось герметизировать. Перед запуском команда плотно сложила 48 строп, три стропа и парашют. Парашютная команда загрузила парашют в специальную конструкцию, которая затем несколько раз приложила тяжелый груз к пакету парашюта. Перед тем, как поместить парашют в кожух, парашют был нагрет на стерилизовать Это.[51]
Подключенные системы

Зилонские уздечки: После того, как парашют был раскрыт на высоте около 10 км (6,2 мили) над поверхностью, теплозащитный экран был снят с помощью 6 разделительных гаек и отталкивающих пружин. Затем спускаемый аппарат отделился от корпуса и «спустился» по металлической ленте на центробежная тормозная система встроен в один из лепестков посадочного модуля. Медленный спуск по металлической ленте поместил посадочный модуль в положение на конце другого троса (троса), сделанного из плетеного плетения длиной почти 20 м (66 футов). Зилон.[51]
Зилон - это усовершенствованный волокнистый материал, похожий на кевлар, который прошит в виде лямок (как материал шнурков), чтобы сделать его прочнее. Уздечка Zylon обеспечивает пространство для развертывания подушки безопасности, расстояние от выхлопной трубы твердотопливного двигателя и повышенную устойчивость. Узелка включает в себя электрический жгут, который позволяет запускать твердотопливные ракеты с задней оболочки, а также передает данные с инерциального измерительного блока задней оболочки (который измеряет скорость и наклон космического корабля) на бортовой компьютер в марсоходе.[51]
Ракетный спуск (РАД) Моторы: Поскольку плотность атмосферы Марса составляет менее 1% от плотности Земли, один только парашют не может замедлить марсоход Mars Exploration Rover настолько, чтобы обеспечить безопасную низкую скорость посадки. Спусканию космического корабля способствовали ракеты, которые привели его к полной остановке на высоте 10–15 м (33–49 футов) над поверхностью Марса.[51]
Блок радиолокационного высотомера: А радиолокационный высотомер Единица использовалась для определения расстояния до поверхности Марса. Антенна РЛС установлена в одном из нижних углов тетраэдра посадочного модуля. Когда измерение с помощью радара показало, что посадочный модуль находится на правильном расстоянии от поверхности, уздечка Zylon была разрезана, освободив посадочный модуль от парашюта и задней части корпуса, чтобы он был свободен и свободен для приземления. Данные радара также позволили установить временную последовательность при надувании подушки безопасности и пуске ракеты RAD.[51]
Подушки безопасности

Подушки безопасности В миссии Mars Exploration Rover использовались те же марсоходы, что и Mars Pathfinder в 1997 году. Они должны были быть достаточно прочными, чтобы амортизировать космический корабль, если он приземлился на камни или пересеченную местность, и позволить ему отскакивать от поверхности Марса на скоростях шоссе (около 100 км / ч) после приземления. Подушки безопасности необходимо было надуть за секунды до приземления и спустить после безопасного касания земли.
Подушки безопасности были сделаны из Вектран, как и на Pathfinder. Вектран почти вдвое прочнее других синтетических материалов, таких как кевлар, и лучше работает при низких температурах. Шесть 100 денье (10 мг / м) слои Вектрана защищали один или два внутренних пузыря Вектрана плотностью 200 денье (20 мг / м). Использование 100 денье (10 мг / м) оставляет больше ткани во внешних слоях там, где это необходимо, потому что в переплетении больше нитей.
Каждый марсоход использовал четыре подушки безопасности с шестью лепестками каждая, все из которых были соединены. Связь была важна, так как она помогла уменьшить часть силы приземления, сохраняя гибкость системы подушек и реагируя на давление земли. Подушки безопасности не были прикреплены непосредственно к марсоходу, а были прикреплены к нему веревками, пересекающими конструкцию сумки. Веревки придавали мешкам форму, облегчая надувание. Во время полета мешки уложили вместе с тремя газогенераторами, которые используются для надувания.
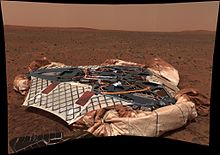
Спускаемый аппарат

Посадочный модуль космического корабля представляет собой защитную оболочку, в которой находится марсоход, и вместе с подушками безопасности защищает его от сил удара.
Посадочный модуль - это тетраэдр форма, стороны которой раскрываются как лепестки. Он прочный и легкий, сделан из балок и листов. Балки состоят из слоев графит Волокно вплетено в ткань, которая легче алюминия и жестче стали. Титановые фитинги приклеиваются и устанавливаются на балки, чтобы их можно было скрепить болтами. Марсоход удерживался внутри посадочного модуля. болты и специальные гайки, которые выпускались после приземления с помощью небольшой взрывчатки.
Вертикальный
После того как посадочный модуль перестал подпрыгивать и катиться по земле, он остановился на основании тетраэдра или на одной из его сторон. Затем стороны открылись, чтобы сделать базу горизонтальной, а марсоход - вертикальным. Боковые стороны соединены с основанием шарнирами, на каждой из которых установлен двигатель, достаточный для подъема посадочного модуля. Посадочный модуль Rover Plus имеет масса около 533 килограммов (1175 фунты ). Только марсоход имеет массу около 185 кг (408 фунтов).Гравитация на Марсе составляет около 38% земной, поэтому двигатель не обязательно должен быть таким мощным, как на Земле.
Марсоход содержит акселерометры определить направление вниз (к поверхности Марса) путем измерения силы тяжести. Затем компьютер ровера дал команду открыть соответствующий лепесток посадочного модуля, чтобы установить марсоход в вертикальное положение. Когда базовый лепесток опускался и марсоход стоял вертикально, два других лепестка открывались.
Изначально лепестки открывались в одинаково плоское положение, поэтому все стороны посадочного модуля были прямыми и ровными. Лепестковые двигатели достаточно сильны, поэтому, если два лепестка упадут на камни, основание с марсоходом будет удерживаться на месте, как мост над землей. Основание будет удерживаться на одном уровне даже с высотой лепестков, лежащих на камнях, создавая ровную ровную поверхность по всей длине открытого плоского посадочного модуля. Затем летная группа на Земле могла бы отправлять команды марсоходу, чтобы отрегулировать лепестки и создать безопасный путь для марсохода, чтобы отъехать от посадочного модуля и выйти на поверхность Марса, не упав с крутой скалы.
Перемещение груза на Марс
Перемещение марсохода с посадочного модуля называется фазой выхода миссии. Колеса вездехода не должны зацепляться за материал подушки безопасности и не падать с крутого уклона. Чтобы помочь в этом, система втягивания на лепестках медленно тянет подушки безопасности к посадочному модулю, прежде чем лепестки открываются. Небольшие выступы на лепестках расширяются, заполняя промежутки между лепестками. Они покрывают неровную местность, каменные препятствия и материал подушек безопасности и образуют круговую зону, из которой марсоход может уехать в разных направлениях. Они также понижают ступеньку, по которой марсоход должен спуститься. Их называют «крылышками летучей мыши», они сделаны из ткани Vectran.
На втягивание подушек безопасности и раскрытие лепестков посадочного модуля было отведено около трех часов.
Дизайн вездехода

Роверы представляют собой шестиколесные роботы на солнечных батареях, высота которых составляет 1,5 м (4,9 фута), ширина 2,3 м (7,5 футов) и длина 1,6 м (5,2 фута). Они весят 180 кг (400 фунтов), из которых 35 кг (77 фунтов) составляют колесо и система подвески.[52]
Основное шасси в виде коробки образует Warm Electronics Box (WEB).
Система привода

Каждый марсоход имеет шесть алюминиевых колес, установленных на рокер-тележка система подвески, аналогичная той, что на Соджорнер,[53] это гарантирует, что колеса остаются на земле при движении по пересеченной местности. Конструкция уменьшает диапазон движения корпуса ровера вдвое и позволяет роверу преодолевать препятствия или отверстия (впадины), размер которых превышает диаметр колеса (250 миллиметров (9,8 дюйма)). Колеса марсохода спроектированы со встроенными изгибы которые обеспечивают амортизацию при движении.[54] Кроме того, на колесах есть шипы, которые обеспечивают сцепление при лазании по мягкому песку и преодолению скал.
Каждое колесо имеет собственный приводной двигатель. Каждое из двух передних и два задних колеса имеет индивидуальные двигатели рулевого управления. Это позволяет автомобилю разворачиваться на месте, совершая полный оборот, а также отклоняться и поворачивать, делая изгибы. Двигатели для марсоходов были разработаны швейцарской компанией. Максон Мотор.[55] Марсоход спроектирован так, чтобы выдерживать наклон на 45 градусов в любом направлении без опрокидывания. Однако марсоход запрограммирован с помощью «пределов защиты от отказов» в программном обеспечении предотвращения опасностей, чтобы избежать превышения 30 градусов наклона.
Каждый марсоход может вращать одно из своих передних колес на месте, чтобы глубоко врезаться в местность. Он должен оставаться неподвижным, пока вращается землеройное колесо. Марсоходы развивают максимальную скорость на ровной твердой поверхности 50 мм / с (2 дюйма / с). Средняя скорость составляет 10 мм / с, поскольку его программное обеспечение по предотвращению опасности заставляет его останавливаться каждые 10 секунд на 20 секунд, чтобы наблюдать и понимать местность, по которой он въехал.
Силовые и электронные системы


При полном освещении марсоход тройное соединение[56] солнечные батареи генерируют около 140 Вт в течение до четырех часов за марсианские сутки (соль ). Для движения марсоходу требуется около 100 Вт. Его система питания включает два аккумуляторных литий-ионный батареи весом 7,15 кг (15,8 фунта) каждая, которые обеспечивают энергию, когда солнце не светит, особенно ночью. Со временем аккумуляторы разряжаются, и их невозможно будет зарядить до полной емкости.
Для сравнения Марсианская научная лаборатория энергосистема России состоит из Многоцелевой радиоизотопный термоэлектрический генератор (MMRTG) производства Boeing.[57] MMRTG рассчитан на обеспечение 125 Вт электроэнергии в начале миссии, а после 14 лет эксплуатации падает до 100 Вт.[58] Он используется для питания многих систем и инструментов MSL. Солнечные панели также рассматривались для MSL, но РИТЭГи обеспечивают постоянную мощность, независимо от времени суток, и, следовательно, универсальность для работы в темноте и в высоких широтах, где солнечная энергия недоступна. MSL генерирует 2,5 киловатт-часы в день, по сравнению с марсоходами Mars Exploration Rover, которые могут генерировать около 0,6 киловатт-часов в день.[59]
Считалось, что к концу миссии на 90 солнечных лучей способность солнечных батарей вырабатывать электроэнергию, вероятно, снизится примерно до 50 Вт. Это произошло из-за ожидаемого запыления солнечных батарей и смены сезона. Однако более чем через три земных года спустя блоки питания марсоходов колеблются между 300 ватт-часы и 900 ватт-часов в день, в зависимости от запыленности. Очистка (удаление пыли ветром) происходила чаще, чем ожидало НАСА, благодаря чему массивы оставались относительно свободными от пыли и продлевали срок службы миссии. Во время глобальной пыльной бури 2007 года на Марсе оба марсохода испытали одну из самых низких мощностей миссии; Возможность упал до 128 ватт-часов. В ноябре 2008 г. Дух побил этот рекорд низкой энергии с выработкой 89 ватт-часов из-за пыльных бурь в районе кратера Гусева.[60]
Марсоходы запускают VxWorks встроенная операционная система на радиационно стойкий 20 МГц RAD6000 ЦПУ с 128 МБ из DRAM с обнаружением и исправлением ошибок и 3 МБ EEPROM. Каждый ровер также имеет 256 МБ флэш-память. Чтобы выжить во время различных фаз миссии, жизненно важные инструменты марсохода должны поддерживать температуру от -40 ° C до +40 ° C (от -40 ° F до 104 ° F). Ночью марсоходы греются на восемь радиоизотопные нагреватели (RHU), каждый из которых непрерывно генерирует 1 W тепловой энергии от распада радиоизотопы, наряду с электронагревателями, которые работают только при необходимости. Распыленная золотая пленка и слой кремнезем аэрогель используются для утепления.
Коммуникация



Марсоход имеет Группа X низкий коэффициент усиления и группа X антенна с высоким коэффициентом усиления для связи с Землей и с Земли, а также сверхвысокая частота монопольная антенна для релейной связи. Антенна с низким усилением всенаправленный, и передает данные с низкой скоростью на Сеть Deep Space (DSN) антенны на Земле. Антенна с высоким коэффициентом усиления является направленной и управляемой и может передавать данные на Землю с более высокой скоростью. Марсоходы используют монополь UHF и радио CE505 для связи с космическими кораблями, вращающимися вокруг Марса, Марс Одиссея и (до его отказа) Mars Global Surveyor (уже более 7,6 терабит данных были переданы с помощью его антенны Mars Relay и Камера орбитального аппарата Марса буфер памяти 12 Мб).[61] С ТОиР вышел на орбиту Марса, посадочные аппараты также использовали его как ретранслятор. Большая часть данных спускаемого аппарата передается на Землю через Odyssey и MRO. Орбитальные аппараты могут принимать сигналы ровера с гораздо более высокой скоростью передачи данных, чем сеть Deep Space Network, из-за гораздо более коротких расстояний от ровера до орбитального аппарата. Затем орбитальные аппараты быстро передают данные ровера на Землю, используя свои большие и мощный антенны.
У каждого марсохода девять камер, которые производят изображения размером 1024 на 1024 пикселя при 12 битах на пиксель.[62] но большинство изображений навигационной камеры и эскизов изображений усекаются до 8 бит на пиксель для экономии памяти и времени передачи. Затем все изображения сжимаются с использованием ICER перед хранением и отправкой на Землю. Навигация, миниатюры и многие другие типы изображений сжимаются примерно до 0,8–1,1 бит / пиксель. Более низкие скорости передачи данных (менее 0,5 бит / пиксель) используются для определенных длин волн многоцветных панорамных изображений.
ICER основан на вейвлеты, и был разработан специально для приложений дальнего космоса. Он производит прогрессивное сжатие, как без потерь, так и с потерями, и включает в себя схему сдерживания ошибок, чтобы ограничить влияние потери данных на канал дальнего космоса. Он превосходит компрессор изображений JPEG с потерями и компрессор рисования без потерь, используемый Марс-следопыт миссия.
Научное оборудование
У марсохода есть различные инструменты. На мачте Pancam Mast Assembly (PMA) установлены три:
- Панорамные камеры (Pancam ), две камеры с колесами цветных фильтров для определения текстуры, цвета, минералогия, и структура местного рельефа.
- Навигационные камеры (Navcam ), две камеры с большим полем обзора, но с меньшим разрешением и монохроматические, для навигации и вождения.
- Узел перископа миниатюрного термоэмиссионного спектрометра (Мини-ТЕС ), который определяет перспективные породы и почвы для более детального изучения и определяет процессы, которые их сформировали. Mini-TES был построен Государственный университет Аризоны. Узел перископа включает в себя два складных зеркала из бериллия, кожух, который закрывается для минимизации загрязнения узла пылью, и перегородки, отклоняющие рассеянный свет, которые стратегически размещены внутри графитовых эпоксидных трубок.
Камеры установлены на мачте Pancam в сборе высотой 1,5 метра. PMA развертывается через привод развертывания мачты (MDD). Азимутальный привод, установленный непосредственно над MDD, поворачивает узел по горизонтали на целый оборот с сигналами, передаваемыми через конфигурацию катящейся ленты. Привод камеры направляет камеры вверх, почти прямо вверх или вниз. Третий двигатель направляет складывающиеся зеркала и защитный кожух Mini-TES на угол до 30 ° над горизонтом и 50 ° под ним. Концептуальный дизайн PMA был выполнен Джейсоном Сачманом из JPL, Cognizant Engineer, который позже работал техническим менеджером по контрактам (CTM), когда сборка была построена Ball Aerospace & Technologies Corp., Боулдер, Колорадо. Рауль Ромеро служил CTM после начала тестирования на уровне подсистем. Сатиш Кришнан разработал концептуальный дизайн карданного подвеса антенны с высоким коэффициентом усиления (HGAG), подробный дизайн, сборка и испытания которого также были выполнены Ball Aerospace, после чего Сатиш выступил в роли CTM.
Четыре монохромные камеры опасности (Hazcams ) установлены на корпусе марсохода, два спереди и два сзади.
Устройство развертывания инструмента (IDD), также называемое рычагом вездехода, содержит следующее:
- Мессбауэровский спектрометр (МБ) MIMOS II, разработанный доктором Гёстаром Клингельхёфером в Йоханнес Гутенберг Университет в Майнц, Германия, используется для детальных исследований минералогии железосодержащих пород и почв.[63][64]
- Рентгеновский спектрометр альфа-частиц (APXS), разработанная Институт химии Макса Планка в Майнц, Германия, используется для детального анализа содержания элементов, составляющих горные породы и почвы.[65] Университеты, участвующие в разработке APXS, включают Университет Гвельфа, Калифорнийский университет, и Корнелл Университет
- Магниты для сбора магнитных частиц пыли,[66] разработан Йенс Мартин Кнудсен группа в Институт Нильса Бора, Копенгаген. Частицы анализируются мессбауэровским спектрометром и рентгеновский снимок Спектрометр, помогающий определить соотношение магнитных и немагнитных частиц и состав магнитных минералов в переносимой по воздуху пыли и горных породах, измельченных инструментом Rock Abrasion Tool. На передней части марсохода также есть магниты, которые тщательно изучаются мессбауэровским спектрометром.
- Микроскопический формирователь изображений (MI) для получения крупным планом изображений горных пород и почв с высоким разрешением. Разработкой руководила команда Кена Херкенхоффа на USGS Программа исследований в области астрогеологии.
- Инструмент для истирания горных пород (RAT), разработанная Робототехника пчелы, для удаления пыльных и выветрившихся поверхностей скал и открытия свежего материала для исследования бортовыми приборами.
Роботизированный манипулятор может размещать инструменты прямо напротив представляющих интерес объектов из камня и почвы.
Название Дух и Возможность

В Дух и Возможность Марсоходы были названы в результате конкурса студенческих сочинений. Победителем стала Софи Коллис,[67] русско-американская ученица третьего класса из Аризоны.
Раньше жила в детском доме. Было темно, холодно и одиноко. Ночью я взглянул на сверкающее небо и почувствовал себя лучше. Я мечтала полететь туда. В Америке я могу осуществить все свои мечты. Спасибо за «Дух» и «Возможность».
- Софи Коллис, 9 лет.
До этого при разработке и строительстве марсоходов они были известны как МЭР-1 (Возможность) и МЭР-2 (Дух). Внутри НАСА также использует обозначения миссий MER-A (Дух) и MER-B (Возможность) исходя из порядка посадки на Марс (Дух будет первый Возможность).
Тестовые вездеходы

Лаборатория реактивного движения обслуживает пару марсоходов, Стенды для испытаний поверхностных систем (SSTB) в своем офисе в Пасадене для тестирования и моделирования ситуаций на Марсе. Один испытательный вездеход, SSTB1, весит примерно 180 кг (400 фунтов), полностью оснащен инструментами и почти идентичен Дух и Возможность. Еще одна тестовая версия, SSTB-Lite, идентична по размеру и характеристикам привода, но не включает все приборы. Он весит 80 килограммов (180 фунтов), что намного ближе к весу Дух и Возможность в сокращенном гравитация Марса. Эти вездеходы использовались в 2009 году для моделирования инцидента, в котором Дух застрял в мягкой почве.[68][69][70]
Программное обеспечение SAPP для просмотра изображений
Команда НАСА использует программное приложение под названием «Положение и наведение на поверхность» (SAPP)[71], для просмотра изображений, полученных с марсохода, и для планирования его повседневной деятельности. Существует общедоступная версия под названием Маэстро.[72]
Выводы планетарной науки
Дух Место посадки, кратер Гусева
Равнины
Хотя кратер Гусева на орбитальных снимках выглядит как высохшее дно озера, наблюдения с поверхности показывают, что внутренние равнины в основном заполнены обломками. Скалы на равнине Гусева - это разновидность базальт. Они содержат минералы оливин, пироксен, плагиоклаз, и магнетит, и они выглядят как вулканический базальт, поскольку они мелкозернистые с неправильными отверстиями (геологи сказали бы, что у них есть пузырьки и каверны).[73][74]Большая часть почвы на равнинах образовалась в результате разрушения местных пород. Достаточно высокий уровень никель были обнаружены в некоторых почвах; вероятно из метеориты.[75]Анализ показывает, что горные породы были слегка изменены крошечным количеством воды. Наружные покрытия и трещины внутри пород предполагают наличие минералов, отложившихся в воде, возможно бром соединения. Все камни содержат тонкий слой пыли и одну или несколько более твердых корок материала. Один тип можно стереть щеткой, а другой нужно стачивать Инструмент для истирания горных пород (КРЫСА).[76]
В Columbia Hills, некоторые из которых были изменены водой, но не очень водой.
 | |
| Координаты | 14 ° 36' ю.ш. 175 ° 30'E / 14,6 ° ю.ш. 175,5 ° в.д.Координаты: 14 ° 36' ю.ш. 175 ° 30'E / 14,6 ° ю.ш. 175,5 ° в.д. |
|---|---|
Эти породы можно классифицировать по-разному. Количество и типы минералов делают эти породы примитивными базальтами, также называемыми пикритовыми базальтами. Скалы похожи на древние земные породы, называемые базальтовыми. коматииты. Скалы равнин также напоминают базальтовые. шерготиты, метеориты, пришедшие с Марса. Одна система классификации сравнивает количество щелочных элементов с количеством кремнезема на графике; в этой системе породы гусевской равнины лежат вблизи стыка базальтов, пикробазальт, и тефрит. Классификация Ирвина-Барагера называет их базальтами.[73]Скалы равнины были очень незначительно изменены, вероятно, тонкими пленками воды, потому что они более мягкие и содержат прожилки светлого материала, который может быть соединениями брома, а также покрытия или корки. Считается, что небольшое количество воды могло попасть в трещины, вызвав процессы минерализации.[74][73]Покрытие на скалах могло образоваться, когда скалы были погребены и взаимодействовали с тонкими пленками воды и пыли. Одним из признаков их изменения было то, что эти породы было легче измельчать по сравнению с камнями того же типа, что и на Земле.
Первый рок, который Дух учился был Адирондак. Оказалось, что это типично для других равнинных скал.

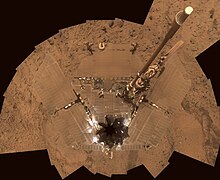
Первый цветной снимок из кратера Гусева. Породы оказались базальтовыми. Все было покрыто мелкой пылью, которая Дух определен был магнитным из-за минерала магнетита.

Разрез типичной породы с равнины кратера Гусева. Большинство камней содержат слой пыли и одно или несколько более твердых покрытий. Видны отложения воды вместе с кристаллами оливина. В жилах могут содержаться соли брома.

Пыль
Пыль в кратере Гусева такая же, как пыль на всей планете. Вся пыль оказалась магнитной. Более того, Дух нашел магнетизм был вызван минералом магнетит, особенно магнетит, содержащий элемент титан. Один магнит смог полностью отвести всю пыль, поэтому вся марсианская пыль считается магнитной.[77] Спектры пыли были похожи на спектры ярких низкоинерционных областей типа Фарсида и Аравия, которые были обнаружены орбитальными спутниками. Тонкий слой пыли толщиной менее одного миллиметра покрывает все поверхности. Что-то в нем содержит небольшое количество химически связанной воды.[78][79]
Columbia Hills
Когда марсоход поднялся над равниной на холмы Колумбия, наблюдаемая минералогия изменилась.[80][81] Ученые обнаружили множество типов горных пород на холмах Колумбия и распределили их по шести различным категориям. Их шесть: Хлодвиг, Вишбон, Мир, Сторожевая башня, Бэкстей и Независимость. Они названы в честь известных рок в каждой группе. Их химический состав, измеренный APXS, значительно отличается друг от друга.[82] Что наиболее важно, все породы на холмах Колумбия показывают различную степень изменения из-за водных флюидов.[83]Они обогащены фосфором, серой, хлором и бромом, которые можно переносить в водных растворах. Скалы на холмах Колумбия содержат базальтовое стекло, а также разное количество оливина и сульфаты.[84][85]Содержание оливина обратно пропорционально количеству сульфатов. Это именно то, что ожидается, потому что вода разрушает оливин, но помогает производить сульфаты.
Группа Хлодвига особенно интересна тем, что Мессбауэровский спектрометр (МБ) обнаружено гетит в этом.[86] Гетит образуется только в присутствии воды, поэтому его открытие является первым прямым доказательством наличия воды в породах холмов Колумбия. Кроме того, спектры МБ в породах и обнажениях показали сильное снижение присутствия оливина,[84]хотя в этих породах, вероятно, когда-то было много оливина.[87] Оливин является маркером недостатка воды, поскольку он легко разлагается в присутствии воды. Был обнаружен сульфат, и для его образования нужна вода. Камень желаний содержал много плагиоклаза, немного оливина и безводный (сульфат). Скалы мира показали сера и убедительные доказательства наличия связанной воды, поэтому подозреваются гидратированные сульфаты. В породах класса Сторожевой Башни отсутствует оливин, следовательно, они могли быть изменены водой. Класс Независимости показал некоторые признаки глины (возможно, монтмориллонит, входящий в группу смектита). Для образования глины требуется довольно длительное воздействие воды. Один тип почвы, называемый Пасо Роблес, из Колумбийских холмов, может быть отложением испарений, потому что он содержит большое количество серы. фосфор, кальций, и железо.[88]Кроме того, МБ обнаружил, что большая часть железа в почве Пасо Роблес была окисленной, Fe3+ Ближе к середине шестилетней миссии (предполагалось, что она продлится всего 90 дней), большое количество чистого кремнезем были обнаружены в почве. Кремнезем мог образоваться в результате взаимодействия почвы с парами кислоты, образовавшимися в результате вулканической активности в присутствии воды или из воды в среде горячих источников.[89]
После Дух переставшие работать ученые изучили старые данные миниатюрного термоэмиссионного спектрометра, или Мини-ТЕС и подтвердили наличие большого количества карбонат -богатые скалы, что означает, что регионы планеты, возможно, когда-то были источником воды. Карбонаты были обнаружены в обнажении горных пород под названием «Команчи».[90][91]
В итоге, Дух нашли свидетельства небольшого выветривания на равнинах Гусева, но не обнаружили там озера. Однако на холмах Колумбия были явные свидетельства умеренного выветривания воды. Доказательства включали сульфаты и минералы гетит и карбонаты, которые образуются только в присутствии воды. Считается, что кратер Гусева, возможно, давным-давно был озером, но с тех пор он был покрыт вулканическими веществами. Вся пыль содержит магнитный компонент, который был идентифицирован как магнетит с некоторым количеством титана. Более того, тонкий слой пыли, покрывающий все на Марсе, одинаков во всех частях Марса.
Возможность Посадочная площадка, Meridiani Planum


В Возможность Марсоход приземлился в небольшом кратере, получившем название «Орел», на плоской равнине Меридиани. Равнины места посадки характеризовались наличием большого количества мелких сферулы, сферический конкреции группы ученых пометили их как «черники», которые были обнаружены как на поверхности, так и в скале. Было доказано, что они имеют высокую концентрацию минерала. гематит, и показал признаки образования в водной среде. Слоистая коренная порода, обнаруженная в стенках кратера, имела признаки осадочного характера, и анализ состава и микроскопических изображений показал, что это в первую очередь связано с составом Ярозит, минерал сульфат железа, который является характерным эвапорит это остатки от испарения соленого пруда или моря.[92][93]
Миссия предоставила существенные доказательства активности воды на Марсе в прошлом. Помимо исследования «водной гипотезы», Возможность также получил астрономические наблюдения и атмосферные данные. В ходе расширенной миссии марсоход пересек равнину к ряду более крупных кратеров на юге, а через восемь лет после приземления он прибыл на край кратера диаметром 25 км, Кратера Индевор. Орбитальная спектроскопия края этого кратера показывает признаки филлосиликат породы, указывающие на более старые осадочные отложения.
Места посадки

Глоссарий
- APXS: Рентгеновский спектрометр альфа-частиц
- DSCC: Центр связи в дальнем космосе
- DSN: Сеть дальнего космоса
- DTS: Начало мертвого времени
- ERT: Время приема с Земли, UTC события
- ЖСБ: программное обеспечение для полета
- HGA: Антенна с высоким коэффициентом усиления
- LGA: Антенна с низким коэффициентом усиления
- MER: Марсоход для исследования Марса
- MSL: Марсианская научная лаборатория
- Мини-ТЕС: Миниатюрный термоэмиссионный спектрометр
- НАСА: Национальное управление по аэронавтике и исследованию космического пространства (США)
- Navcam: Навигационная камера
- Pancam: Панорамная камера
- КРЫСА: Инструмент для истирания горных пород
- RCS: Система контроля реакции
Смотрите также
- Четырехугольник эолиды
- Программа исследований в области астрогеологии из Геологическая служба США
- Комплексные системы защиты Boeing
- Состав Марса
- Голдстоунский комплекс дальней космической связи
- Программа Лунохода (Луноходы)
- Maestro (программное обеспечение)
- Исследование космоса
- Сид Либерман (Официальный рассказчик миссии по исследованию Марса)
Примечания
- ^ mars.nasa.gov. «Обновление ровера: 2010: все». mars.nasa.gov. Получено 14 февраля, 2019.
- ^ Стрикленд, Эшли. «Спустя 15 лет миссия марсохода Mars Opportunity завершилась». CNN. Получено 14 февраля, 2019.
- ^ «Обзор миссии марсохода для исследования Марса». НАСА. Архивировано из оригинал 3 июня 2009 г.. Получено 25 ноября, 2009.
- ^ а б c «НАСА расширяет миссию марсоходов». NBC News. 16 октября 2007 г.. Получено 5 апреля, 2009.
- ^ «Миссия марсохода по исследованию Марса: пресс-релизы». marsrovers.jpl.nasa.gov. Получено 25 мая, 2015.
- ^ «Отчет о состоянии марсохода: марсоход возобновляет движение». nasa.gov. Получено 3 сентября, 2007.
- ^ Фонтан, Генри (25 мая 2009 г.). "Кратер был сформирован ветром и водой, данные показывают данные марсохода". Нью-Йорк Таймс. Получено 26 мая, 2009.
- ^ "Марсоход Spirit NASA, ставший теперь стационарной исследовательской платформой, открывает новую главу в научных исследованиях красной планеты". Архивировано из оригинал 28 мая 2010 г.. Получено 28 января, 2010.
- ^ «НАСА завершает попытки связаться с марсоходом Spirit». НАСА. Получено 25 мая, 2011.
- ^ а б Гротцингер, Джон П. (24 января 2014 г.). «Введение в специальный выпуск - обитаемость, тафономия и поиск органического углерода на Марсе». Наука. 343 (6169): 386–387. Bibcode:2014Научный ... 343..386G. Дои:10.1126 / science.1249944. PMID 24458635.
- ^ Разное (24 января 2014 г.). «Специальный выпуск - Оглавление - Изучение марсианской пригодности». Наука. 343 (6169): 345–452. Получено 24 января, 2014.
- ^ Разное (24 января 2014 г.). «Специальная коллекция - любопытство - изучение марсианской пригодности». Наука. Получено 24 января, 2014.
- ^ Grotzinger, J.P .; и другие. (24 января 2014 г.).«Обитаемая флювио-озерная среда в заливе Йеллоунайф, кратер Гейла, Марс». Наука. 343 (6169): 1242777. Bibcode:2014Научный ... 343A.386G. CiteSeerX 10.1.1.455.3973. Дои:10.1126 / science.1242777. PMID 24324272. S2CID 52836398.
- ^ «Научные цели марсохода для исследования Марса». marsrovers.nasa.gov. Архивировано из оригинал 24 августа 2011 г.. Получено 25 мая, 2015.
- ^ "300px-View_over_Launch_Complex_17". upload.wikimedia.org. Получено 25 мая, 2015.
- ^ "Марсоход Spirit достигает" домашней плиты ": формирование озадачило исследователей". Space.com. Получено 1 мая, 2018.
- ^ «Марсоход НАСА прибывает в впечатляющую перспективу на Красной планете». nasa.gov. Получено 28 сентября, 2006.
- ^ «Марсоход, Global Surveyor, миссии Odyssey продлены». Получено 27 сентября, 2006.
- ^ «Возможность переходит 10-километровую отметку». nasa.gov. Получено 8 февраля, 2007.
- ^ «Марсоход НАСА готов к спуску в кратер». jpl.nasa.gov. Получено 15 июля, 2007.
- ^ «Возможность ждать, пока осядет пыль». jpl.nasa.gov. Получено 15 июля, 2007.
- ^ «Отчет о состоянии марсохода: марсоход возобновляет движение». НАСА. Получено 30 августа, 2007.
- ^ «Hardy Rover продолжает отмечать вехи». НАСА. Получено 16 октября, 2007.
- ^ «НАСА в пятый раз продлевает миссию марсохода». НАСА. Получено 16 октября, 2007.
- ^ "Марсоход НАСА: возможность восхождения из кратера Виктория". jpl.nasa.gov. Получено 27 августа, 2008.
- ^ «Марсоход НАСА поднимается на ровную поверхность». jpl.nasa.gov. Получено 29 августа, 2008.
- ^ «Марсоходам НАСА исполняется пять лет на Красной планете». CNN. 3 января 2009 г.. Получено 3 января, 2009.
- ^ «Один марсоход видит далекую цель, другой выбирает новый путь». НАСА / Лаборатория реактивного движения. 18 марта 2009 г.. Получено 20 марта, 2009.
- ^ «Один марсоход видит далекую цель, другой выбирает новый путь». НАСА / Лаборатория реактивного движения. 18 марта 2009 г.. Получено 20 марта, 2009.
- ^ «Ровер Opportunity преодолевает 10-мильную отметку на Марсе». Space.com. 26 мая 2009 г.. Получено 27 мая, 2009.
- ^ «Дух застрял в« коварной ловушке-невидимке »на Марсе». Space.com. 21 мая 2009 г.. Получено 27 мая, 2009.
- ^ "Раймонд Э. Арвидсон". Департамент наук о Земле и планетах. 14 февраля 2018 г.. Получено 19 августа, 2019.
- ^ «НАСА - Биографии участников дискуссии». www.nasa.gov. Получено 19 августа, 2019.
- ^ «Миссия марсохода по исследованию Марса: пресс-релизы». marsrovers.jpl.nasa.gov. Получено 25 мая, 2015.
- ^ "Марсоход Spirit NASA, ставший теперь стационарной исследовательской платформой, открывает новую главу в научных исследованиях красной планеты". НАСА. 26 января 2010 г.. Получено 29 января, 2010.
- ^ а б «Возможность превышает 20 километров общего вождения». НАСА. 24 марта 2010 г. Архивировано с оригинал 28 мая 2010 г.. Получено 18 апреля, 2010.
- ^ "Дух, возможно, начал многомесячную спячку". НАСА. 31 марта 2010 г. Архивировано с оригинал 28 мая 2010 г.. Получено 18 апреля, 2010.
- ^ "Opportunity Rover достиг полпути долгого пути". НАСА / Лаборатория реактивного движения. 8 сентября 2010 г.. Получено 12 октября, 2010.
- ^ «НАСА завершает попытки связаться с марсоходом Spirit». НАСА / Лаборатория реактивного движения. 24 мая 2011 г.. Получено 25 мая, 2011.
- ^ «Марсоход показывает грубый рисунок». 3 Новости NZ. 25 апреля 2013 г.
- ^ «Мужское достоинство с Марса: НАСА покраснело после того, как Ровер нарисовал грубый образ.'". 3 Новости NZ. 25 апреля 2013 г.
- ^ а б c d «Девятилетний марсоход« Марсоход »побил рекорд 40-летней давности». НАСА / Лаборатория реактивного движения. 16 мая, 2013. Получено 25 мая, 2013.
- ^ а б Вебстер, Гай; Браун, Дуэйн (28 июля 2014 г.). «Долгоживущий марсоход НАСА устанавливает мировой рекорд вождения». НАСА. Получено 29 июля, 2014.
- ^ Кнапп, Алекс (29 июля, 2014). «Ровер NASA Opportunity устанавливает рекорд вождения за пределами мира». Forbes. Получено 29 июля, 2014.
- ^ «Марсоход NASA Opportunity завершает марафон, срок его выполнения составляет чуть более 11 лет». НАСА / Лаборатория реактивного движения. 23 марта 2015 г.. Получено 8 июля, 2015.
- ^ Ровер Opportunity по-прежнему молчит на Марсе через 4 месяца после начала эпической пыльной бури В архиве 15 октября 2018 г. Wayback Machine. Майк Уолл, Space.com. 12 октября 2018 г.
- ^ «Миссия марсохода по исследованию Марса: все обновления возможностей». mars.nasa.gov. В архиве с оригинала 25 марта 2018 г.. Получено 10 февраля, 2019.
- ^ Статус возможности на 12 января 2019 г.
- ^ Чанг, Кеннет (13 февраля 2019 г.). «Марсоход НАСА Opportunity завершил 15-летнюю миссию». Нью-Йорк Таймс. Получено 13 февраля, 2019.
- ^ «Дух и возможность: колеса на Марсе». Планета Марс. SpringerLink. 2008. С. 201–204. Дои:10.1007/978-0-387-48927-8_64. ISBN 978-0-387-48925-4. Отсутствует или пусто
| название =(помощь)[мертвая ссылка ] - ^ а б c d е ж грамм «Миссия марсохода по исследованию Марса: Миссия». nasa.gov. В архиве с оригинала 30 сентября 2019 г.. Получено 12 сентября, 2020.
- ^ «Технические данные MER». Получено 15 июля, 2007.
- ^ Колеса MER Rover
- ^ "Колеса в небе". Лаборатория реактивного движения НАСА. Получено 14 февраля, 2017.
- ^ «И снова НАСА полагается на технологию maxon». Максон Мотор. Получено 14 февраля, 2019.
- ^ Д. Крисп; А. Патхаре; Р. К. Юэлл (2004). «Производительность солнечных элементов из арсенида галлия / германия на поверхности Марса». Прогресс в фотоэлектрической технике: исследования и приложения. 54 (2): 83–101. Bibcode:2004AcAau..54 ... 83C. Дои:10.1016 / S0094-5765 (02) 00287-4.
- ^ «Технологии широкой выгоды: мощность». Архивировано из оригинал 14 июня 2008 г.. Получено 20 сентября, 2008.
- ^ «Обзор программы НАСА по разработке радиоизотопных энергетических систем с высокой удельной мощностью» (PDF). Pdf.aiaa.org. Архивировано из оригинал (PDF) 9 августа 2012 г.. Получено 25 октября, 2012.
- ^ Уотсон, Трэйси (14 апреля 2008 г.). «Проблемы параллельны амбициям в проекте NASA Mars». USA Today. Получено 27 мая, 2009.
- ^ «Марсианские пыльные бури угрожают марсоходам». Новости BBC. 21 июля 2007 г.. Получено 22 июля, 2007.
- ^ Малин, Майкл С .; Edgett, Kenneth S .; Кантор, Брюс А .; Каплингер, Майкл А .; Г. Эдвард Дэниэлсон; Дженсен, Эльза Х .; Ravine, Michael A .; Сандовал, Дженнифер Л .; Супулвер, Кимберли Д. (6 января 2010 г.). "Обзор научного исследования Mars Orbiter Camera в 1985–2006 гг.". Марс - Международный журнал науки и исследований Марса. 5: 1–60. Bibcode:2010IJMSE ... 5 .... 1M. Дои:10.1555 / март.2010.0001. S2CID 128873687.
- ^ [1]
- ^ Klingelhöfer G .; Бернхардт Бут .; Foh J .; Bonnes U .; Родионов Д .; Де Соуза П. А .; Schroder C .; Gellert R .; Kane S .; Гутлич П .; Канкелейт Э. (2002). «Миниатюрный мессбауэровский спектрометр MIMOS II для внеземных и наземных приложений: отчет о состоянии». Сверхтонкие взаимодействия. 144 (1): 371–379. Bibcode:2002HyInt.144..371K. Дои:10.1023 / А: 1025444209059. S2CID 94640811.
- ^ Klingelhoefer; и другие. (2007). «МИНИАТЮРИЗОВАННЫЙ СПЕКТРОМЕТР МЕССБАУЭРА MIMOS II: ПРИЛОЖЕНИЕ ДЛЯ МИССИИ« ФОБОС-ГРАНТ »» (PDF).
- ^ Р. Ридер; Р. Геллерт; Й. Брюкнер; Г. Клингельхёфер; Г. Драйбус; А. Йен; С. В. Сквайрс (2003). «Новый рентгеновский спектрометр альфа-частиц Athena для марсоходов Mars Exploration». Журнал геофизических исследований. 108 (E12): 8066. Bibcode:2003JGRE..108.8066R. Дои:10.1029 / 2003JE002150.
- ^ [2]
- ^ Пресс-релиз НАСА, название, победитель
- ^ «Деятельность на Марсе и Земле направлена на то, чтобы вернуть дух снова в движение». 18 мая 2009 г.. Получено 22 января, 2010.
- ^ Аткинсон, Нэнси (2 июля 2009 г.). "Тестовый вездеход застрял - и это хорошо!". Получено 14 марта, 2014.
- ^ НАСА. "Отчеты руководителя миссии духа". Получено 14 марта, 2014.
- ^ Али, К.С. (5 октября 2005 г.). «Оценка ориентации и положения на марсоходах» (PDF). Получено 31 октября, 2020.
- ^ "Маэстро - Добро пожаловать в Штаб Маэстро". 5 сентября 2011 г. Архивировано с оригинал 5 сентября 2011 г.. Получено 16 февраля, 2017.
- ^ а б c Максуин и др. 2004. «Базальтовые породы, исследованные марсоходом Spirit в кратере Гусева». Наука : 305. 842-845
- ^ а б Arvidson R.E .; и другие. (2004). "Эксперименты по локализации и физическим свойствам, проведенные духом в кратере Гусева". Наука. 305 (5685): 821–824. Bibcode:2004Наука ... 305..821А. Дои:10.1126 / science.1099922. PMID 15297662. S2CID 31102951.
- ^ Gelbert R .; и другие. (2006). «Рентгеновский спектрометр альфа-частиц (APXS): результаты из кратера Гусева и отчет о калибровке». J. Geophys. Res. Планеты. 111 (E2): E02S05. Bibcode:2006JGRE..111.2S05G. Дои:10.1029 / 2005JE002555.
- ^ Кристенсен П. (август 2004 г.). «Первые результаты эксперимента Mini-TES в кратере Гусева с марсохода Spirit». Наука. 305 (5685): 837–842. Bibcode:2004Наука ... 305..837C. Дои:10.1126 / science.1100564. PMID 15297667. S2CID 34983664.
- ^ Бертельсен П .; и другие. (2004). «Магнитные свойства марсохода Spirit в кратере Гусева». Наука. 305 (5685): 827–829. Bibcode:2004Научный ... 305..827B. Дои:10.1126 / science.1100112. PMID 15297664. S2CID 41811443.
- ^ Белл, Дж. (Ред.) Марсианская поверхность. 2008. Издательство Кембриджского университета. ISBN 978-0-521-86698-9
- ^ Gelbert R .; и другие. (2004). "Химия горных пород и почв кратера Гусева по данным рентгеновского спектрометра альфа-частиц". Наука. 305 (5685): 829–32. Bibcode:2004Наука ... 305..829G. Дои:10.1126 / science.1099913. PMID 15297665. S2CID 30195269.
- ^ Arvidson R .; и другие. (2006). "Обзор миссии марсохода Spirit Exploration к кратеру Гусева: место посадки на скалу Backstay Rock в холмах Колумбия" (PDF). Журнал геофизических исследований. 111 (E2): E02S01. Bibcode:2006JGRE..111.2S01A. Дои:10.1029 / 2005je002499. HDL:2060/20080026038.
- ^ Crumpler L .; и другие. (2005). «Геологический поход марсохода для исследования Марса марсоходом Spirit на равнинах кратера Гусева на Марсе». Геология. 33 (10): 809–812. Bibcode:2005Гео .... 33..809C. Дои:10.1130 / g21673.1.
- ^ Squyres S .; и другие. (2006). "Скалы холмов Колумбия". J. Geophys. Res. Планеты. 111 (E2): н / д. Bibcode:2006JGRE..111.2S11S. Дои:10.1029 / 2005JE002562.
- ^ Ming D .; и другие. (2006). «Геохимические и минералогические индикаторы водных процессов в Колумбийских холмах кратера Гусева на Марсе». J. Geophys. Res. 111 (E2): н / д. Bibcode:2006JGRE..111.2S12M. Дои:10.1029 / 2005je002560. HDL:1893/17114.
- ^ а б Schroder, C., et al. (2005) Европейский союз наук о Земле, Генеральная ассамблея, Геофизические исследования, т. 7, 10254, 2005 г.
- ^ Кристенсен, П.Р. (2005). «Минеральный состав и обилие горных пород и почв в Гусеве и Меридиани по результатам совместной сборки Mars Exploration Rover Mini-TES Instruments AGU, 23-27 мая 2005 г.». Agu.org.
- ^ Klingelhofer, G., et al. (2005) Лунная планета. Sci. XXXVI abstr. 2349
- ^ Моррис С. и др. Мессбауэровская минералогия горных пород, почвы и пыли в кратере Гусева, Марс: журнал Spirit через слабо измененный оливиновый базальт на равнинах и широко измененный базальт на холмах Колумбия. J. Geophys. Разр .: 111
- ^ Ming, D., et al. 2006 Геохимические и минералогические индикаторы водных процессов в Колумбийских холмах кратера Гусева на Марсе. J. Geophys. Рез.111
- ^ "НАСА - Марсоход Spirit обнаруживает неожиданные доказательства более влажного прошлого". nasa.gov. Получено 25 мая, 2015.
- ^ Моррис, Р. В .; Ruff, S.W .; Gellert, R .; Ming, D. W .; Arvidson, R.E .; Clark, B.C .; Golden, D. C .; Зибах, К .; Klingelhofer, G .; Schroder, C .; Fleischer, I .; Йен, А. С .; Squyres, S. W. (4 июня 2010 г.). «На Марсе обнаружено обнажение долгожданной редкой породы». Наука. 329 (5990): 421–424. Bibcode:2010Sci ... 329..421M. Дои:10.1126 / science.1189667. PMID 20522738. S2CID 7461676. Получено 25 октября, 2012.
- ^ Моррис Ричард V .; Ерш Стивен В .; Геллерт Ральф; Ming Douglas W .; Arvidson Raymond E .; Кларк Бентон К .; Golden D. C .; Зибах Кирстен; Klingelhöfer Göstar; Шредер Кристиан; Флейшер Ирис; Йен Альберт С .; Сквайрс Стивен В. (2010). «Идентификация богатых карбонатами обнажений на Марсе с помощью вездехода Spirit». Наука. 329 (5990): 421–424. Bibcode:2010Sci ... 329..421M. Дои:10.1126 / science.1189667. PMID 20522738. S2CID 7461676.
- ^ Squyres S .; и другие. (2004). "Научное исследование Athena Rover на Меридиани Планум, Марс". Наука. 306 (5702): 1698–1703. Bibcode:2004Наука ... 306.1698S. Дои:10.1126 / science.1106171. PMID 15576602. S2CID 7876861.
- ^ Squyres S .; и другие. (2006). «Обзор миссии марсохода Opportunity на Меридиани Планум: от Кратера Орла до Дюны Чистилища». Журнал геофизических исследований. 111 (E12): E12S12. Bibcode:2006JGRE..11112S12S. Дои:10.1029 / 2006je002771. HDL:1893/17165.
Рекомендации
- Части этой статьи заимствованы из Статья NASA / JPL MER.
- Дополнительная информация была адаптирована из домашняя страница MER
дальнейшее чтение
- Блуждающий Марс: дух, возможности и исследование Красной планеты к Стив Скуайрес (опубликовано в августе 2005 г .; ISBN 1-4013-0149-5)
- Открытки с Марса: Первый фотограф на Красной планете Джим Белл (опубликовано в ноябре 2006 г .; ISBN 0-525-94985-2)
- Технические документы инженеров-робототехников JPL
- Интервью: водитель марсоходов НАСА из Australian PC World
внешняя ссылка
- Веб-сайт MER НАСА JPL
- Профиль миссии духа
- Возможность Профиль миссии
- Проект Mars Exploration Rover, документ НАСА / Лаборатория реактивного движения NSS ISDC 2001 27 мая 2001 г.
- Наука, 6 августа 2004 г. - Научные труды первого этапа Дух миссия
- Марсоход Руководство: Централизованный ресурс для всех общедоступных технических деталей роверов.
- Записная книжка аналитиков MER (доступ к набору научных данных MER)
- Scientific American Журнал (выпуск за март 2004 г.) "Дух исследования"
- Li2-Rover
- Официальная галерея изображений PanCam True Color
- Галерея изображений Rover
- Неофициальная галерея цветных изображений Daily PanCam
- Архив отчетов о ходе выполнения MER от A.J.S. Райл на planetary.org
Марсоход для исследования Марса (MER) программа | ||
|---|---|---|
| Общий |
|  |
| Дух марсоход | ||
| Возможность марсоход | ||
| Инструменты |
| |
| Связанный |
| |
Особенности на Марс посетил Возможность | ||
|---|---|---|
| Кратеры | ||
| Стараться | ||
| Горные породы | ||



{kind=link}
| Политика и история |
| ||||||
|---|---|---|---|---|---|---|---|
| Полет человека в космос программы |
| ||||||
| Роботизированный программы |
| ||||||
| Индивидуальные особенности миссии (человек и робот) |
| ||||||
| Связь и навигация | |||||||
| Списки НАСА | |||||||
| Изображения НАСА и произведения искусства | |||||||
| Связанный |
| ||||||