Линейный асинхронный двигатель - Linear induction motor


А линейный асинхронный двигатель (LIM) является переменный ток (AC), асинхронный линейный двигатель который работает по тем же общим принципам, что и другие асинхронные двигатели но обычно предназначен для прямого создания движения по прямой линии. Как правило, линейные асинхронные двигатели имеют конечную длину первичной или вторичной обмотки, что создает конечные эффекты, тогда как обычный асинхронный двигатель расположен в бесконечной петле.[1]
Несмотря на свое название, не все линейные асинхронные двигатели производят линейное движение; некоторые линейные асинхронные двигатели используются для вращения большого диаметра, где использование непрерывной первичной обмотки было бы очень дорогостоящим.
Как и роторные двигатели, линейные двигатели часто работают от трехфазного источника питания и могут поддерживать очень высокие скорости. Однако есть конечные эффекты, которые уменьшают силу двигателя, и часто невозможно установить коробку передач, чтобы сбалансировать силу и скорость. Таким образом, линейные асинхронные двигатели часто менее энергоэффективны, чем обычные роторные двигатели для любой заданной требуемой выходной силы.
LIM, в отличие от своих вращающихся аналогов, может давать эффект левитации. Поэтому они часто используются там, где требуется бесконтактное усилие, где требуются низкие эксплуатационные расходы или где рабочий цикл невелик. Их практическое использование включает Магнитная левитация, линейные двигатели и линейные приводы. Они также использовались для перекачки жидких металлов.[2]
История
История линейных электродвигателей восходит как минимум к 1840-м годам до работы Чарльз Уитстон в Королевский колледж В Лондоне,[3] но модель Уитстона была слишком неэффективной, чтобы быть практичной. Возможный линейный асинхронный двигатель описан в патенте США 782312 (1905; изобретатель Альфред Цеден из Франкфурта-на-Майне) и предназначен для приведения в движение поездов или лифтов. Немецкий инженер Герман Кемпер Построен рабочий образец в 1935 году.[4] В конце 1940-х гг. Эрик Лэйтуэйт из Имперский колледж в Лондон разработана первая полноразмерная рабочая модель.

В одностороннем варианте магнитное поле может создавать силы отталкивания, которые отталкивают проводник от статора, левитируя его и неся в направлении движущегося магнитного поля. Лэйтуэйт назвал более поздние версии магнитная река. Эти версии линейного асинхронного двигателя используют принцип, называемый поперечный поток где два противоположных полюса поставлены рядом. Это позволяет использовать очень длинные опоры и, таким образом, обеспечивает высокую скорость и эффективность.[5]
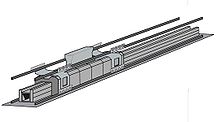
строительство
Первичная обмотка линейного электродвигателя обычно состоит из плоского магнитного сердечника (обычно ламинированного) с поперечными пазами, которые часто имеют прямой разрез.[6] с катушками, уложенными в прорези, причем каждая фаза имеет чередующуюся полярность, так что разные фазы физически перекрываются.
Вторичное часто представляет собой лист из алюминия, часто с железным опорной плитой. Некоторые модули LIM являются двухсторонними, с одной первичной обмоткой на каждой стороне вторичной, и в этом случае железная подкладка не требуется.
Существует два типа линейных двигателей: короткие начальные, где катушки усечены короче, чем вторичная, и короткое среднее, где токопроводящая пластина меньше. Короткие вторичные модули LIM часто наматываются как параллельные соединения между катушками одной и той же фазы, тогда как короткие первичные обмотки обычно наматываются последовательно.[7]
Первичные обмотки ЛАД с поперечным потоком имеют ряд сдвоенных полюсов, расположенных бок о бок в поперечном направлении с противоположными направлениями намотки. Эти полюса, как правило, производится либо с соответствующим образом вырезать пластины ламинированной подложки или серией поперечных U-образные сердечники.
Принципы

В этой конструкции электродвигателя сила создается линейно движущимся магнитное поле действуя на проводников в полевых условиях. Любой проводник, будь то петля, катушка или просто кусок металлической пластины, помещенный в это поле, будет иметь вихревые токи индуцированный в нем создавая противоположное магнитное поле в соответствии с Закон Ленца. Два противоположных поля будут отталкивать друг друга, создавая движение, когда магнитное поле пронизывает металл.

где жs частота питающей сети в Гц, п - количество полюсов, а пs - синхронная скорость магнитного поля в оборотах в секунду.
Картина бегущего поля имеет скорость:

где vs - скорость линейного бегущего поля в м / с, а т - полюсный шаг.
За промах s, скорость вторичной обмотки линейного двигателя определяется выражением

Силы
Толкать

Привод, создаваемый линейными асинхронными двигателями, в чем-то похож на обычные асинхронные двигатели; движущие силы демонстрируют примерно аналогичную характеристическую форму относительно скольжения, хотя и модулируемую концевыми эффектами.[9]
Существуют уравнения для расчета тяги двигателя.[10]
Конечный эффект
В отличие от асинхронного двигателя круглого сечения, линейный асинхронный двигатель демонстрирует «конечные эффекты». Эти конечные эффекты включают в себя потери производительности и эффективности, которые, как считается, вызваны уносом магнитной энергии и потерями в конце первичной обмотки из-за относительного движения первичной и вторичной обмоток.
С короткой вторичной обмоткой поведение почти идентично роторной машине, при условии, что она имеет длину как минимум два полюса, но с коротким первичным снижением тяги, которое происходит при малом скольжении (ниже примерно 0,3), пока оно не станет восьми полюсов или больше.[7]
Однако из-за концевых эффектов линейные двигатели не могут «работать налегке» - обычные асинхронные двигатели могут работать с двигателем с почти синхронным полем в условиях низкой нагрузки. Напротив, конечные эффекты создают гораздо более значительные потери с линейными двигателями.[7]
Левитация
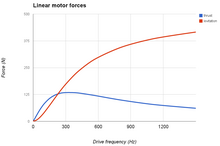
Кроме того, в отличие от роторного двигателя, электродинамическая левитация сила, она равна нулю при нулевом скольжении и дает примерно постоянную величину силы / зазора, когда скольжение увеличивается в любом направлении. Это происходит в односторонних двигателях, и левитация обычно не происходит, когда на вторичной обмотке используется железная опорная пластина, поскольку это вызывает притяжение, которое подавляет подъемную силу.[9]
Спектакль
Линейные асинхронные двигатели часто менее эффективны, чем обычные роторные асинхронные двигатели; Концевые эффекты и часто присутствующий относительно большой воздушный зазор обычно уменьшают силы, возникающие при той же самой электрической мощности.[1] Аналогичным образом, эффективность во время работы генератора (электрическое торможение / рекуперация) с линейным асинхронным двигателем была отмечена как относительно низкая из-за конечных эффектов.[11] Большой воздушный зазор также увеличивает индуктивность двигателя, что может потребовать больших и более дорогих конденсаторов.
Однако линейные асинхронные двигатели могут избавить от необходимости в коробках передач и аналогичных трансмиссиях, и они имеют свои собственные потери; и практическое знание важности фактор доброты может минимизировать влияние большего воздушного зазора. В любом случае потребление энергии не всегда является самым важным соображением. Например, во многих случаях линейные асинхронные двигатели имеют гораздо меньше движущихся частей и требуют очень низкого обслуживания. Кроме того, использование линейных асинхронных двигателей вместо вращающихся двигателей с поворотно-линейной передачей в управления движением систем, обеспечивает более высокую пропускную способность и точность система контроля, потому что поворотно-линейные передачи вносят люфт, статическое трение и / или механическую податливость в систему управления.
Использует

Благодаря этим свойствам линейные двигатели часто используются в маглев движитель, как у японцев Линимо поезд на магнитной подушке линия рядом Нагоя.

Первая в мире коммерческая автоматизированная магнитолевая система была низкоскоростной шаттл на магнитной подвеске который бежал от терминала аэропорта Бирмингем аэропорт к ближайшему Бирмингемский международный железнодорожный вокзал между 1984–1995 гг.[12] Длина пути составляла 600 метров (2000 футов), а поезда «летели» на высоте 15 миллиметров (0,59 дюйма), левитировали с помощью электромагнитов и приводились в движение линейными асинхронными двигателями.[13] Он проработал почти одиннадцать лет, но устаревание проблемы с электронными системами сделали его ненадежным в последние годы. Один из оригинальных автомобилей выставлен на выставке Railworld в Питерборо вместе с RTV31 парящий поезд.[14]
Однако линейные двигатели использовались независимо от магнитной левитации, такие как Токио с Toei Ōedo Line. В Bombardier Innovia Metro представляет собой пример автоматизированной системы, в которой используется движитель LIM. Самый длинный быстрый транзит система, использующая такую технологию, является Метро Гуанчжоу, примерно 130 км (81 миль) маршрута с использованием поездов метро LIM вдоль Строка 4, Строка 5 и Строка 6. Они также используются Tomorrowland Transit Authority PeopleMover в Tomorrowland в волшебное королевство в Мир Уолта Диснея в Bay Lake, Флорида только за пределами Орландо, Флорида.
Технология линейных асинхронных двигателей также используется в некоторых запущенные американские горки. В настоящее время это все еще непрактично для уличного бега трамваи, хотя теоретически это можно сделать, закопав его в прорези.

За пределами общественного транспорта вертикальные линейные двигатели были предложены в качестве подъемных механизмов в глубоких шахты, и использование линейных двигателей растет в управления движением Приложения. Они также часто используются на раздвижных дверях, например, в низкий этаж трамваи такой как Alstom Citadis и Евротрам.
Также существуют двухосные линейные двигатели. Эти специализированные устройства использовались для прямого Икс-Y движение для точной лазерной резки ткани и листового металла, автоматизированное составление, и формирование кабеля. Кроме того, линейные асинхронные двигатели с цилиндрической вторичной обмоткой использовались для обеспечения одновременного линейного и вращательного движения для монтажа электронных устройств на печатных платах.[15]
Большинство используемых линейных двигателей - это LIM (линейные асинхронные двигатели) или LSM (линейные синхронные двигатели). Линейные двигатели постоянного тока не используются, поскольку они более дорогостоящие и линейные. SRM страдает плохой тягой. Таким образом, для длительных пробегов на тяговых усилиях предпочтительнее использовать LIM, а для краткосрочных - LSM.
Линейные асинхронные двигатели также использовались для запуска самолетов Westinghouse Electropult.[7] система в 1945 году была ранним примером, и Электромагнитная система запуска самолета (EMALS) должна была быть поставлена в 2010 году.
Линейные асинхронные двигатели также используются в ткацких станках, магнитная левитация позволяет бобинам плавать между волокнами без прямого контакта.
Первый безканальный лифт изобретен ThyssenKrupp использует мощность линейного индукционного привода.[16]
Смотрите также
Рекомендации
- ^ а б Гасеминеджад Лиаси, Саханд (15 мая 2015 г.). "Что такое линейные двигатели?": 1–50. Дои:10.13140 / RG.2.2.16250.18887. Получено 24 декабря 2017. Цитировать журнал требует
| журнал =(Помогите) - ^ Inc, Образовательный фонд ядерной науки (1 сентября 1973 г.). «Вестник ученых-атомщиков». Образовательный фонд ядерной науки, Inc. - через Google Книги.
- ^ "Чарльз Уитстон - История колледжа - Королевский колледж Лондона". Kcl.ac.uk. Архивировано из оригинал 21 октября 2009 г.. Получено 2010-03-01.
- ^ «Архивная копия». Архивировано из оригинал на 2011-09-28. Получено 2011-08-24.CS1 maint: заархивированная копия как заголовок (ссылка на сайт)
- ^ Номер патента 3585423, 1971 Laithwaite et al.
- ^ [1][постоянная мертвая ссылка ]
- ^ а б c d линейные электрические машины - личное мнение ЭРИК Р. ЛЕЙТВЭЙТ, ЧЕЛОВЕК, IEEE, ПРОЦЕСС IEEE, VOL. 63, НЕТ. 2 ФЕВРАЛЯ 1975 г.
- ^ а б c «Линейный асинхронный двигатель: работа, применение и конструкция». sunilsaharan.in.
- ^ а б Анализ сил линейного асинхронного двигателя для системы магнитной левитации 14-я Международная конференция по силовой электронике и управлению движением, EPE-PEMC 2010
- ^ Журнал современного транспорта, июнь 2012 г., том 20, выпуск 2, стр. 76–81. Новый метод расчета тяги линейного асинхронного двигателя на основе мгновенного значения тока.
- ^ Фланкл, Майкл; Туйсуз, Арда; де Оливейра Бауманн, Лукас; Колар, Иоганн В. (2019). «Сбор энергии с помощью односторонних индукционных машин с вторичным проводящим покрытием» (PDF). IEEE Transactions по промышленной электронике. 66 (6): 4880–4890. Дои:10.1109 / TIE.2018.2821637. S2CID 53447221. Получено 4 апреля 2018.
- ^ «Магнитное притяжение поездов». Новости BBC. 9 ноября 1999 г.
- ^ Маглев, фильм для The People Mover Group
- ^ Блок Маглев для Railworld Железная дорога выпуск 425 26 декабря 2001 г. стр. 65
- ^ Мехатронная конструкция индукционного привода z-φ, P. de Wit, J. van Dijk, T. Blomer и P. Rutgers, proc. конференции IEE EMD '97. Cambridge 1997. pp. 279-283, 1-3 сентября 1997 г.
- ^ Майли, Джессика (26.06.2017). «Первый в мире безканатный многонаправленный лифт будет установлен в Берлине». Интересная инженерия.