Роботизированные платформы Swarm - Swarm robotic platforms
Роботизированные платформы Swarm подать заявление рой робототехника[1] в сотрудничестве с несколькими роботами.[2] Они черпают вдохновение в природе (например, коллективное решение проблем механизмы, встречающиеся в природе, такие как пчела агрегирование[3][4]). Основная цель - контролировать большое количество роботы (с ограниченными возможностями восприятия / обработки) для выполнения общей задачи / проблемы. Аппаратные ограничения и стоимость робототехнических платформ ограничивают текущие исследования роевой робототехники, в основном, выполняемыми программным обеспечением для моделирования (например, Stage,[5] ARGoS[6]). С другой стороны, моделирование сценариев роя, для которых требуется большое количество агентов, чрезвычайно сложно и часто неточно из-за плохого моделирования внешних условий и ограничений вычислений.
Сравнение платформ
Несколько мобильных платформы роботов ранее были разработаны для изучения приложений роя.
| Робот | Датчик / модуль | Движение / Макс. Скорость | Размер / Диаметр | Время автономии | Университет / Институт | Программное обеспечение с открытым исходным кодом | Оборудование с открытым исходным кодом | Описание | Изображение |
|---|---|---|---|---|---|---|---|---|---|
| AMiR | расстояние, свет, пеленг | колесо, 10 см / с | 6.5 см | 2 ч | Университет Путра Малайзия | AMiR[7] - это недорогая роботизированная платформа для роя, разработанная как мобильный робот с открытым исходным кодом и оборудованием. Многие исследования в основном посвящены агрегации медоносных пчел.[3] (BEECLUST) было проведено с AMiR (например, нечеткое решение[4]). |  | ||
| Алиса | расстояние, камера | колесо, 4 см / с | 2,2 см | 10 часов | École Polytechnique Fédérale de Lausanne (EPFL), Швейцария | Алиса - это роботизированная платформа, построенная в очень маленьком корпусе. Алиса использовалась во многих исследовательских приложениях, таких как воплощение агрегации тараканов.[8] | 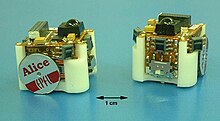 Микроробот Алиса | ||
| Виолончель | структурированная камера с плотным рисунком, емкостное касание | всенаправленное шариковое колесо, 20 см / с | 7,5 см | 1-2 часа | École Polytechnique Fédérale de Lausanne (EPFL), Швейцария | Виолончель[9][10] это одна из первых в мире платформ для осязаемых роев роботов, сочетающая автономные рои с осязаемым многопользовательским осязаемым взаимодействием. Изначально созданная как образовательная платформа, в настоящее время проводятся исследования по реабилитации, играм и взаимодействию человека с компьютером с Cellulo в дополнение к образованию. |  Роботы Cellulo в реальном сценарии взаимодействия роя. | ||
| Колии | расстояние, свет, неровность, пеленг, дальность | колесо / 35 см / с | 4 см | 1-3 ч | CIL в Университет Линкольна, ВЕЛИКОБРИТАНИЯ | Колии[11][12] это недорогая платформа с открытым исходным кодом (открытое оборудование), которая была разработана для использования в рой робот Приложения [13]. |  Рой роботов Колиас | ||
| Колиас-III | Камера, расстояние, свет, удар, пеленг, дальность | колесо, 35 см / с | 4 см | 1-3 ч | CIL в Университет Линкольна, ВЕЛИКОБРИТАНИЯ | Колиас-III[14] представляет собой расширенную версию микроробота Colias. Он был в основном разработан для реализации систем технического зрения на основе биологических материалов. |  Колиас-III | ||
| Капли | Свет | вибрация | 4,4 см | 24ч + | Лаборатория Коррелла в Колорадский университет | Капельки открытые жесткий - и программная экспериментальная платформа для крупномасштабных исследований роения.[15][16][17] Команда собрала средства через краудфандинг построить 1000 таких «капель».[18] Бесконечные эксперименты благодаря силовому полу, который служит глобальной коммуникационной средой для программирования роя.[19] | |||
| Электронная шайба | расстояние, камера, пеленг, ускорение, микрофон | колесо / 13 см / с | 7,5 см | 1-10 часов | École Polytechnique Fédérale de Lausanne (EPFL), Швейцария | Электронная шайба[21] - один из самых успешных роботов, созданный в первую очередь для образовательных целей. Однако из-за своей простоты он также часто используется в исследованиях роевой робототехники. Он имеет заменяемые пользователем батареи и время автономной работы 2-4 часа. |  e-puck мобильный робот | ||
| Жасмин | расстояние, свет, пеленг | колесо, N / A | 3 см | 1-2 часа | Штутгартский университет, Германия | Жасмин[23] это роботизированная платформа для роя, которая использовалась во многих исследованиях роя роботов.[3] |  Рой микророботов Jasmine с открытым исходным кодом | ||
| Килобот | расстояние, свет | вибрация, 1 см / с | 3,3 см | 3 - 24 часа | Гарвардский университет, СОЕДИНЕННЫЕ ШТАТЫ АМЕРИКИ | Килобот[26] - это относительно недавняя роботизированная платформа с новыми функциями, такими как групповая зарядка и групповое программирование. Благодаря своей простоте и низкому энергопотреблению он имеет длительное время автономной работы до 24 часов. Роботы заряжаются вручную группами на специальной зарядной станции. | |||
| Кобот | расстояние, пеленг, видение, компас | колесо, N / A | 12 см | 10 часов | KOVAN Research Lab, г. Ближневосточный технический университет, Индюк | Кобот[27] это мобильный робот, специально разработанный для роботизированных исследований роя. Он имеет несколько датчиков, что делает его идеальной платформой для реализации различных сценариев роя роботов, таких как скоординированное движение. Время автономной работы составляет около 10 часов. Он имеет заменяемую пользователем батарею, которая заряжается вручную. Он был использован при реализации сценария самоорганизации флокирования.[28] | |||
| Мона | расстояние, неровность, дальность, RF | колесо, 5 см / с | 6.5 см | Вечный | В Манчестерский университет, ВЕЛИКОБРИТАНИЯ | Мона[31] - это робот с открытым исходным кодом, в основном разработанный для тестирования предлагаемого Perpetual Robotic Swarm.[32] Он был спроектирован как модульная платформа, позволяющая развертывать дополнительные модули, прикрепляемые поверх платформы, такие как беспроводная связь или видеонаблюдение. Последняя версия робота была разработана как роботизированная платформа для образовательных и исследовательских целей. |  Робот-платформа Mona | ||
| R-One | свет, ИК, гироскоп, отбойник, акселерометр | колесо, 30 см / с | 10 см | 6 часов | Университет Райса, СОЕДИНЕННЫЕ ШТАТЫ АМЕРИКИ | R-one[34] это недорогой робот для исследовательских и учебных целей. Он использовался в нескольких исследованиях по робототехнике роя. | |||
| S-бот | свет, ИК, положение, сила, скорость, температура, влажность, соотв., микрофон | деревья | 12 см | 2 ч | École Polytechnique Fédérale de Lausanne (EPFL), Швейцария | S-бот[35] - одна из самых влиятельных и эффективных роботизированных платформ из когда-либо созданных. s-боты имеют уникальный дизайн захвата, способный захватывать объекты и других s-ботов. Время автономной работы составляет примерно 1 час. | |||
| Spiderino | дальность, световая, подшипниковая (с надставкой) | шесть ножек, 6 см / с | 8 см | 4-20 часов | Клагенфуртский университет, Австрия | Spiderino[37] это недорогой исследовательский робот, основанный на двигателе игрушки-паука Hexbug. Модификация заменяет голову робота на адаптер, напечатанный на 3D-принтере, состоящий из двух частей для обеспечения места для датчиков, большей батареи и печатной платы (PCB) с микроконтроллером Arduino, модулем Wi-Fi и контроллером двигателя. | |||
| SwarmBot | дальность, пеленг, камера, отбойник | колесо, 50 см / с | 12,7 см | 3 ч | Университет Райса, СОЕДИНЕННЫЕ ШТАТЫ АМЕРИКИ | SwarmBot[38] - еще одна успешная платформа, разработанная для исследований в области роевой робототехники. Он имеет около 3 часов автономной работы, и роботы могут находить зарядные станции, размещенные на стенах, и стыковаться с ними. |
Рекомендации
- ^ Х. Хаманн, Swarm Robotics: формальный подход, Спрингер, Нью-Йорк, 2018.[ISBN отсутствует ]
- ^ Шахин, Эрол. "Робототехника Swarm: от источников вдохновения к областям применения ". Международный семинар по роевой робототехнике. Springer Berlin Heidelberg, 2004.[ISBN отсутствует ]
- ^ а б c Шмикль, Томас и др. "Свяжитесь с нами: совместное принятие решений на основе столкновений роботов с роботами ". Автономные агенты и мультиагентные системы 18.1 (2009): 133–155.
- ^ а б Арвин, Фаршад и др. "Агрегация на основе реплик с роем мобильных роботов: новый нечеткий метод ". Адаптивное поведение (2014). Дои:10.1177/1059712314528009.
- ^ Воан, Ричард. "Массовое моделирование нескольких роботов в стадии "Swarm Intelligence 2.2–4 (2008): 189–208.
- ^ Пинчироли, Карло и др. "ARGoS: модульный многомоторный симулятор для гетерогенной роевой робототехники ". Международная конференция IEEE / RSJ по интеллектуальным роботам и системам, 2011 г.
- ^ Арвин, Фаршад и др. "Разработка миниатюрного робота для приложения Swarm Robotic ". Международный журнал компьютерной и электротехники 1.4 (2009): 436.
- ^ Гарнье, Саймон и др. "Воплощение агрегационного поведения тараканов в группе микророботов. ". Искусственная жизнь 14.4 (2008): 387-408.
- ^ Озгюр, Айберк; Леманьян, Северин; Джохал, Вафа; Бельтран, Мария; Бриод, Манон; Перейре, Леа; Мондада, Франческо; Дилленбург, Пьер (2017). «Виолончель». Материалы Международной конференции ACM / IEEE 2017 по взаимодействию человека и робота - HRI '17. С. 119–127. Дои:10.1145/2909824.3020247. ISBN 9781450343367. S2CID 2277067.
- ^ Озгюр, Айберк (2018). Виолончель: осязаемые тактильные роботы для обучения (Кандидат наук). EPFL. Дои:10.5075 / epfl-thesis-8241.
- ^ «Недорогие автономные роботы повторяют роение». Новый Атлас. 2014-09-22. Получено 4 января 2017.
- ^ Арвин, Фаршад и др. «Колиас: автономный микроробот для роботизированного роя». Международный журнал передовых робототехнических систем 11 (2014): 113.
- ^ Na, S. et al. (2020) «Биологически вдохновленная система искусственных феромонов для приложений роя робототехники», Adaptive Behavior. DOI: 10,1177 / 1059712320918936.
- ^ Ху, Ченг и др. «Встроенная система машинного зрения для автономных микроботов: пример LGMD», IEEE Transactions on Cognitive and Developmental Systems, 2016.
- ^ а б "Капли". Correll Lab. 20 декабря 2012 г.. Получено 4 января 2017.
- ^ «Роботы размером с мяч для пинг-понга могут роиться вместе и образовывать умную жидкость». Популярная наука. Получено 4 января 2017.
- ^ Солон, Оливия. «Рой крошечных роботов образует« думающую жидкость »(Wired UK)». Проводная Великобритания. Архивировано 31 декабря 2012 года.. Получено 4 января 2017.CS1 maint: BOT: статус исходного URL-адреса неизвестен (ссылка на сайт)
- ^ «Капли - робототехника роя». Получено 4 января 2017.
- ^ «Капли: недорогая платформа для робототехники для обучения и экспериментов | Robohub». robohub.org. Получено 2018-05-30.
- ^ "электронная шайба". Получено 7 января 2017.
- ^ Мондада, Франческо и др. «Электронная шайба, робот, разработанный для инженерного образования». Материалы 9-й конференции по автономным робототехническим системам и соревнованиям. Vol. 1. № LIS-CONF-2009-004. IPCB: Instituto Politécnico de Castelo Branco, 2009.
- ^ «Проект микророботов с открытым исходным кодом Swarmrobot». www.swarmrobot.org. Получено 7 января 2017.
- ^ Кернбах, Серж и др. «Повторное воплощение агрегации пчел в искусственной микроробототехнической системе». Адаптивное поведение 17.3 (2009): 237-259.
- ^ "acornejo / kilobot-labs". GitHub. Получено 7 января 2017.
- ^ «Группа исследования самоорганизующихся систем». www.eecs.harvard.edu. Архивировано из оригинал 26 октября 2014 г.. Получено 7 января 2017.
- ^ Рубенштейн, Майкл и др. «Килобот: недорогой робот с масштабируемыми операциями, предназначенный для коллективного поведения». Робототехника и автономные системы 62.7 (2014): 966-975.
- ^ Тургут, Али Э. и др. «Кобот: мобильный робот, разработанный специально для исследования роя робототехники». Ближневосточный технический университет, Анкара, Турция, METUCENG-TR Tech. Реп 5 (2007)
- ^ Тургут, Али Э. и др. «Самоорганизованное скопление в роях мобильных роботов». Swarm Intelligence 2.2-4 (2008): 97-120.
- ^ «Мона Робот». Получено 8 марта 2017.
- ^ «Основные функции робота Mona и тестовый код в Arduino: MonaRobot / Mona-Platform». 2019-08-31.
- ^ Ф. Арвин, Дж. Эспиноза, Б. Берд, А. Вест, С. Уотсон, Б. Леннокс Арвин, Фаршад; Эспиноза, Хосе; Птица, Бенджамин; Уэст, Эндрю; Ватсон, Саймон; Леннокс, Барри (2018). «Мона: доступный мобильный робот с открытым исходным кодом для образования и исследований». Журнал интеллектуальных и робототехнических систем. 94 (3–4): 761–775. Дои:10.1007 / s10846-018-0866-9. S2CID 116022614., Журнал интеллектуальных и робототехнических систем, 2018 г.
- ^ Ф. Арвин, С. Уотсон, А. Э. Тургут, Дж. Эспиноза, Т. Крайник, Б. Леннокс "Постоянный рой роботов: длительная автономия мобильных роботов с использованием индуктивной зарядки на лету", Журнал интеллектуальных и робототехнических систем , 2017 г.
- ^ "Лаборатория систем нескольких роботов - Университет Райса, Хьюстон, Техас". mrsl.rice.edu. Получено 4 января 2017.
- ^ МакЛуркин, Джеймс и др. «Недорогая система с несколькими роботами для исследований, обучения и пропаганды». Распределенные автономные робототехнические системы. Springer Berlin Heidelberg, 2013. 597-609.
- ^ Мондада, Франческо и др. «SWARM-BOT: новая концепция распределенного робота». Автономные роботы 17.2-3 (2004): 193-221.
- ^ "Спидерино". Получено 27 июля 2020.
- ^ Джид, Мидхат и др. "Spiderino - недорогой робот для исследовательских и образовательных целей. ". В 13-м семинаре по интеллектуальным решениям во встроенных системах (WISES 2017), страницы 35–39, июль 2017 г.
- ^ МакЛуркин, Джеймс и др. "Speaking Swarmish: дизайн интерфейса человек-робот для больших групп автономных мобильных роботов ". Весенний симпозиум AAAI: смело идти туда, куда не делала ни одна команда человек-робот. 2006.

| Основные статьи |  | |
|---|---|---|
| Типы | ||
| Классификации | ||
| Передвижение | ||
| Исследование | ||
| Связанный | ||
| ||