Анализ ошибок для глобальной системы позиционирования - Error analysis for the Global Positioning System

В анализ ошибок для спутниковая система навигации важно для понимания того, как работает GPS, и для того, чтобы знать, какой величины ошибок следует ожидать. GPS вносит поправки на ошибки часов приемника и другие эффекты, но остаются остаточные ошибки, которые не исправляются. Положение приемника GPS вычисляется на основе данных, полученных со спутников. Ошибки зависят от геометрического снижения точности и источников, перечисленных в таблице ниже.
Обзор
В этом разделе фактическая точность оспаривается. (Июнь 2016) (Узнайте, как и когда удалить этот шаблон сообщения) |
| Источник | Эффект (м) |
|---|---|
| Прибытие сигнала C / A | ±3 |
| Прибытие сигнала P (Y) | ±0.3 |
| Ионосферные эффекты | ±5 |
| Ошибки эфемерид | ±2.5 |
| Ошибки спутниковых часов | ±2 |
| Многолучевое искажение | ±1 |
| Тропосферные эффекты | ±0.5 |
| C / A | ±6.7 |
| P (Y) | ±6.0 |



Ошибки эквивалентного диапазона пользователя (UERE) показаны в таблице. Также есть числовая ошибка с оценочной стоимостью, , около 1 метра. Стандартные отклонения, , для грубого / сбора данных (C / A) и точных кодов также показаны в таблице. Эти стандартные отклонения вычисляются путем извлечения квадратного корня из суммы квадратов отдельных компонентов (т. Е. RSS для корня из суммы квадратов). Чтобы получить стандартное отклонение оценки местоположения приемника, эти ошибки дальности необходимо умножить на соответствующий снижение точности термины, а затем RSS с числовой ошибкой. Ошибки электроники - это один из нескольких факторов, снижающих точность, перечисленных в таблице выше. Вместе взятые, автономные гражданские GPS определения горизонтального положения обычно имеют точность примерно до 15 метров (50 футов). Эти эффекты также снижают точность более точного кода P (Y). Однако развитие технологий означает, что в настоящее время точность определения местоположения гражданского GPS при хорошем обзоре неба составляет в среднем около 5 метров (16 футов) по горизонтали.


Термин "ошибка эквивалентного диапазона пользователя" (UERE) относится к ошибке компонента на расстоянии от приемника до спутника. Эти ошибки UERE представлены как ошибки ±, что означает, что они являются несмещенными или нулевыми средними ошибками. Поэтому эти ошибки UERE используются при вычислении стандартных отклонений. Стандартное отклонение ошибки положения приемника,, вычисляется путем умножения PDOP (снижение точности положения) на, стандартное отклонение ошибок диапазона, эквивалентного пользователю. вычисляется путем извлечения квадратного корня из суммы квадратов стандартных отклонений отдельных компонентов.

PDOP вычисляется как функция положения приемника и спутника. Подробное описание того, как рассчитать PDOP, дано в разделе Геометрическое снижение точности вычислений (GDOP).
для кода C / A определяется как:

Стандартное отклонение ошибки в предполагаемом положении приемника , опять же для кода C / A:

Диаграмма ошибок слева показывает взаимосвязь указанного положения приемника, истинного положения приемника и пересечения четырех сферических поверхностей.
Измерение времени прихода сигнала
Положение, вычисленное приемником GPS, требует текущего времени, положения спутника и измеренной задержки принятого сигнала. Точность определения местоположения в первую очередь зависит от местоположения спутника и задержки сигнала.
Чтобы измерить задержку, приемник сравнивает битовую последовательность, полученную от спутника, с версией, созданной внутри. Сравнивая нарастающий и задний фронты битовых переходов, современная электроника может измерять смещение сигнала с точностью до одного процента от ширины битового импульса, , или примерно 10 наносекунд для кода C / A. Поскольку сигналы GPS распространяются в скорость света, это составляет ошибку около 3 метров.

Этот компонент точности позиционирования можно улучшить в 10 раз, используя сигнал P (Y) с более высокой чиповой скоростью. Предполагая тот же один процент точности ширины битового импульса, высокочастотный сигнал P (Y) дает точность или около 30 сантиметров.

Атмосферные эффекты
Несоответствие атмосферных условий влияет на скорость сигналов GPS, когда они проходят через Атмосфера Земли, особенно ионосфера. Исправление этих ошибок является серьезной проблемой для повышения точности определения местоположения GPS. Эти эффекты наименьшие, когда спутник находится прямо над головой, и усиливаются для спутников, расположенных ближе к горизонт так как путь через атмосферу длиннее (см. масса воздуха ). Как только приблизительное местоположение приемника известно, можно использовать математическую модель для оценки и компенсации этих ошибок.
Ионосферная задержка СВЧ-сигнала зависит от его частоты. Он возникает из ионизированной атмосферы (см. Общее электронное содержание ). Это явление известно как разброс и может быть рассчитан на основе измерений задержек для двух или более полос частот, что позволяет оценить задержки на других частотах.[1] Некоторые военные и дорогие гражданские приемники исследовательского класса рассчитывают атмосферную дисперсию по различным задержкам на частотах L1 и L2 и применяют более точную поправку. Это можно сделать в гражданских приемниках без расшифровки сигнала P (Y), передаваемого по L2, путем отслеживания несущая волна вместо модулированный код. Чтобы облегчить это на более дешевых приемниках, новый гражданский кодовый сигнал на L2, названный L2C, был добавлен к спутникам Block IIR-M, которые были впервые запущены в 2005 году. Он позволяет прямое сравнение сигналов L1 и L2 с использованием кодированных сигнал вместо несущей.
Воздействие ионосферы обычно изменяется медленно и может быть усреднено по времени. Эти значения для любой конкретной географической области можно легко вычислить, сравнив положение, измеренное с помощью GPS, с известным местом съемки. Эта поправка также действительна для других приемников в том же месте. Некоторые системы отправляют эту информацию по радио или другим каналам, чтобы приемники, работающие только на L1, могли вносить ионосферные поправки. Ионосферные данные передаются через спутник в Спутниковые системы дополнения (SBAS) такие как Система увеличения площади (WAAS) (доступно в Северной Америке и на Гавайях), EGNOS (Европа и Азия), Многофункциональная спутниковая система дополнения (MSAS) (Япония) и GPS-навигация с гео-дополнениями (GAGAN) (Индия), который передает его на частоте GPS с использованием специальной псевдослучайной шумовой последовательности (PRN), поэтому требуются только один приемник и антенна.
Влажность также вызывает переменную задержку, приводящую к ошибкам, аналогичным ионосферной задержке, но возникающим в тропосфера. Этот эффект более локализован, чем ионосферные эффекты, изменяется быстрее и не зависит от частоты. Эти особенности делают точное измерение и компенсацию ошибок влажности более трудными, чем ионосферные эффекты.[2]
В Атмосферное давление может также изменить задержку приема сигналов из-за присутствия в тропосфере сухих газов (78% N2, 21% O2, 0,9% Ar ...). Его действие меняется в зависимости от местной температуры и атмосферного давления вполне предсказуемым образом с использованием законов идеальных газов.[3]
Эффекты многолучевого распространения
На сигналы GPS также могут влиять многолучевость проблемы, при которых радиосигналы отражаются от окружающей местности; здания, стены каньона, твердый грунт и т. д. Эти задержанные сигналы вызывают ошибки измерения, которые различны для каждого типа сигнала GPS из-за его зависимости от длины волны.[4]
Для уменьшения ошибок, связанных с многолучевым распространением, были разработаны различные методы, в первую очередь узкий интервал между корреляторами. Для многолучевого распространения с большой задержкой приемник сам может распознать встречный сигнал и отбросить его. Для решения проблемы многолучевого распространения с более короткой задержкой от сигнала, отражающегося от земли, специальные антенны (например, дроссельная заслонка антенны ) может использоваться для уменьшения мощности сигнала, принимаемого антенной. Отражения с короткой задержкой труднее отфильтровать, потому что они мешают истинному сигналу, вызывая эффекты, почти неотличимые от обычных колебаний атмосферной задержки.
Эффекты многолучевого распространения гораздо менее серьезны в движущихся транспортных средствах. Когда антенна GPS движется, ложные решения с использованием отраженных сигналов быстро не сходятся, и только прямые сигналы приводят к стабильным решениям.
Эфемериды и ошибки часов
В то время как эфемериды данные передаются каждые 30 секунд, сама информация может быть старше двух часов. Изменчивость давления солнечной радиации[5] косвенно влияет на точность GPS из-за влияния на ошибки эфемерид. Если пост время сначала исправить (TTFF), можно загрузить действительные эфемериды в приемник, и в дополнение к установке времени, определение местоположения может быть получено менее чем за десять секунд. Такие эфемеридные данные можно разместить в Интернете, чтобы их можно было загрузить в мобильные устройства GPS.[6] Смотрите также Вспомогательный GPS.
Атомные часы спутников испытывают шум и часы дрейф ошибки. В навигационном сообщении содержатся исправления этих ошибок и оценки точности атомных часов. Однако они основаны на наблюдениях и могут не указывать на текущее состояние часов.
Эти проблемы, как правило, очень малы, но могут составлять несколько метров (десятков футов) неточности.[7]
Для очень точного позиционирования (например, в геодезия ) эти эффекты могут быть устранены дифференциальный GPS: одновременное использование двух и более приемников на нескольких точки обследования. В 1990-е годы, когда приемники были довольно дорогими, некоторые методы квазидифференциальный GPS были разработаны, используя только один приемник, но повторное заселение точек измерения. В Венском техническом университете метод получил название qGPS и было разработано программное обеспечение для постобработки.[нужна цитата ]
Геометрическое снижение точности вычислений (GDOP)
Расчет геометрического снижения точности
Понятие геометрического снижения точности было введено в разделе, источники ошибок и анализ. Были предоставлены расчеты, чтобы показать, как использовался PDOP и как он влиял на стандартное отклонение ошибки местоположения приемника.
Когда видимые спутники GPS расположены близко друг к другу в небе (т. Е. С небольшим угловым разделением), значения DOP высокие; когда они далеко друг от друга, значения DOP низкие. По идее, спутники, которые расположены близко друг к другу, не могут предоставить столько информации, как спутники, которые находятся на большом расстоянии друг от друга. Низкие значения DOP представляют лучшую точность позиционирования GPS из-за более широкого углового разнесения между спутниками, используемыми для расчета положения приемника GPS. HDOP, VDOP, PDOP и TDOP - это соответственно по горизонтали, вертикали, позиции (3-D) и временного снижения точности.
Рисунок 3.1 Снижение точности данных Navstar GPS от береговой охраны США дает графическое представление о том, как геометрия влияет на точность.[8]
Теперь мы беремся за задачу, как вычислить снижение точности. В качестве первого шага в вычислении DOP рассмотрим единичный вектор от приемника к спутнику i с компонентами , , и где расстояние от приемника до спутника, , дан кем-то:





куда и обозначают положение приемника и и обозначить положение спутника я. Эти Икс, у, и z Компоненты могут быть компонентами в системе координат Север, Восток, Вниз, системе координат Юг, Восток, Вверх или в другой удобной системе. Сформулируйте матрицу А в качестве:





Первые три элемента каждой строки А являются компонентами единичного вектора от приемника до указанного спутника. Элементами в четвертом столбце являются c, где c обозначает скорость света. Сформулируйте матрицу, Q, так как

Это вычисление производится в соответствии с главой 11 Глобальной системы позиционирования Паркинсона и Спилкера, где весовая матрица п, был установлен в единичную матрицу. Элементы Q матрицы обозначены как:[9]

Греческая буква довольно часто используется там, где мы использовали d. Однако элементы Q Матрицы не представляют дисперсии и ковариации, поскольку они определены в вероятности и статистике. Вместо этого они являются строго геометрическими терминами. Таким образом, d as для снижения точности используется. PDOP, TDOP и GDOP даются как


в соответствии с «Раздел 1.4.9 ПРИНЦИПОВ РАЗМЕЩЕНИЯ СПУТНИКОВ».
Горизонтальное снижение точности, , и вертикальное снижение точности, , оба зависят от используемой системы координат. Чтобы соответствовать плоскости местного горизонта и местной вертикали, Икс, у, и z должен обозначать позиции в системе координат север, восток, вниз или юг, восток, вверх.


Вывод уравнений для вычисления геометрического снижения точности
Уравнения для вычисления геометрического снижения точности членов были описаны в предыдущем разделе. В этом разделе описывается вывод этих уравнений. Используемый здесь метод аналогичен используемому в «Глобальная система позиционирования (превью) Паркинсона и Спайкера»
Рассмотрим вектор ошибки положения, , определяемый как вектор от пересечения четырех сферических поверхностей, соответствующих псевдодальностям, до истинного положения приемника. где жирным шрифтом обозначен вектор, а , , и обозначают единичные векторы вдоль осей x, y и z соответственно. Позволять обозначают ошибку времени, истинное время минус время, указанное приемником. Предположим, что среднее значение трех компонентов и равны нулю.







куда , , , и - ошибки в псевдодальностях с 1 по 4 соответственно. Это уравнение происходит от линеаризации уравнение Ньютона-Рафсона связь псевдодальностей с положением приемника, положениями спутников и ошибками часов приемника. Умножая обе стороны на есть результаты





- .

Переставляем обе стороны:
- .

После умножения матриц с обеих сторон уравнения (2) на соответствующие матрицы в уравнении (3) получаем
- .

Взяв ожидаемое значение с обеих сторон и взяв неслучайные матрицы за пределы оператора ожидания, E, получаем:

Предполагая, что ошибки псевдодальности некоррелированы и имеют одинаковую дисперсию, ковариационная матрица с правой стороны может быть выражена как скаляр, умноженный на единичную матрицу. Таким образом

поскольку

Примечание: поскольку


Замена на там следует


Из уравнения (7) следует, что отклонения указанного положения приемника и времени равны
- и


Остальные условия дисперсии ошибки положения и времени следуют прямо.
Выборочная доступность
В GPS есть (в настоящее время отключена) функция под названием Выборочная доступность (SA), который добавляет к общедоступным навигационным сигналам преднамеренные изменяющиеся во времени погрешности до 100 метров (328 футов). Это было сделано с целью запретить противнику использовать гражданские приемники GPS для наведения высокоточного оружия.
Ошибки SA на самом деле являются псевдослучайными, генерируются криптографическим алгоритмом из классифицированного семя ключ доступный только авторизованным пользователям (военные США, их союзники и некоторые другие пользователи, в основном правительственные) со специальным военным приемником GPS. Простого владения приемником недостаточно; ему по-прежнему нужен строго контролируемый ежедневный ключ.
До отключения 2 мая 2000 года типичные ошибки SA составляли около 50 м (164 фута) по горизонтали и около 100 м (328 футов) по вертикали.[10] Поскольку SA влияет на каждый приемник GPS в данной области почти одинаково, фиксированная станция с точно известным местоположением может измерять значения ошибок SA и передавать их местным приемникам GPS, чтобы они могли исправить свои определения местоположения. Это называется дифференциальным GPS или DGPS. DGPS также исправляет несколько других важных источников ошибок GPS, в частности ионосферную задержку, поэтому он продолжает широко использоваться, даже если SA отключен. Неэффективность SA перед лицом широко доступной DGPS была распространенным аргументом в пользу отключения SA, и в конечном итоге это было сделано по приказу президента. Клинтон в 2000 г.[11]
Услуги DGPS широко доступны как из коммерческих, так и из государственных источников. К последним относятся WAAS и Береговая охрана США сеть LF морские навигационные маяки. Точность поправок зависит от расстояния между пользователем и приемником DGPS. По мере увеличения расстояния ошибки на двух участках также не будут коррелировать, что приведет к менее точным дифференциальным поправкам.
В 1990–91 гг. Война в Персидском заливе из-за нехватки военных устройств GPS многие военнослужащие и их семьи покупали легкодоступные гражданские устройства. Выборочная доступность значительно затруднила использование этих GPS военными США на поле боя, поэтому военные приняли решение отключить его на время войны.
В 1990-е гг. FAA начал оказывать давление на военных, чтобы они отключили СА навсегда. Это позволило бы FAA ежегодно экономить миллионы долларов на обслуживании собственных радионавигация системы. Сумма добавленной ошибки была «установлена на ноль».[12] в полночь 1 мая 2000 г. после заявления президента США Билл Клинтон, позволяя пользователям получать доступ к безошибочному сигналу L1. Согласно директиве, вызванная ошибка SA была изменена, чтобы не добавлять ошибок к общедоступным сигналам (код C / A). Указ Клинтона требовал, чтобы SA была обнулена к 2006 году; это произошло в 2000 году, когда американские военные разработали новую систему, которая дает возможность отказывать в использовании GPS (и другим навигационным службам) враждебным силам в конкретной зоне кризиса, не затрагивая остальной мир или свои собственные военные системы.[12]
19 сентября 2007 г. Министерство обороны США объявил, что будущее GPS III спутники не смогут реализовать SA,[13] в конечном итоге сделав политику постоянной.[14]
Антиспуфинг
Остается еще одно ограничение по GPS - антиспуфинг. Это шифрует P-код так что он не может быть имитирован передатчиком, отправляющим ложную информацию. Немногие гражданские приемники когда-либо использовали P-код, и точность, достигаемая с помощью общедоступного кода C / A, была намного лучше, чем ожидалось изначально (особенно с DGPS ), настолько сильно, что политика защиты от подделки имеет относительно небольшое влияние на большинство гражданских пользователей. Отключение функции защиты от подделки в первую очередь принесет пользу геодезистам и некоторым ученым, которым необходимы чрезвычайно точные положения для таких экспериментов, как отслеживание движения тектонических плит.
Относительность
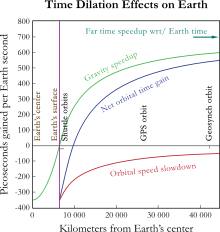
Существует ряд источников ошибок из-за релятивистский последствия[15] это сделало бы систему бесполезной, если бы ее не исправляли. Три релятивистских эффекта - это замедление времени, гравитационный сдвиг частоты и эффекты эксцентриситета. Примеры включают релятивистское время замедление из-за скорости спутника около 1 части из 1010, гравитационное замедление времени, которое заставляет спутник лететь примерно на 5 частей из 1010 Быстрее чем часы на Земле, и Эффект Саньяка из-за вращения относительно приемников на Земле. Эти темы рассматриваются ниже по очереди.
Специальная и общая теория относительности
Согласно теории относительности, из-за их постоянного движения и высоты относительно Земли в центре, невращающиеся приблизительно инерционные система отсчета на часы спутников влияет их скорость. Специальная теория относительности предсказывает, что частота атомных часов, движущихся с орбитальной скоростью GPS, будет идти медленнее, чем стационарные наземные часы, в раз , или привести к задержке около 7 мкс / день, где орбитальная скорость v = 4 км / с, а c = скорость света. Этот замедление времени Эффект был измерен и подтвержден с помощью GPS.

Влияние сдвига частоты гравитации на GPS из-за общая теория относительности в том, что часы ближе к массивному объекту будут медленнее, чем часы дальше. Применительно к GPS приемники расположены намного ближе к Земле, чем спутники, в результате чего часы GPS работают быстрее в 5 × 10 раз.−10, или около 45,9 мкс / день. Этот сдвиг частоты гравитации заметен.
При объединении замедления времени и гравитационного сдвига частоты расхождение составляет около 38 микросекунд в сутки, то есть разница в 4,465 частей на 1010.[16] Без исправления в позиции будут накапливаться ошибки примерно 11,4 км / день.[17] Эта начальная ошибка псевдодальности исправляется в процессе решения уравнения навигации. Вдобавок эллиптические, а не идеально круглые орбиты спутников вызывают изменение во времени эффектов замедления времени и гравитационного сдвига частоты. Этот эффект эксцентриситета приводит к тому, что разница в тактовой частоте спутника GPS и приемника увеличивается или уменьшается в зависимости от высоты спутника.
Чтобы компенсировать это несоответствие, стандарту частоты на борту каждого спутника перед запуском дается сдвиг скорости, что делает его немного медленнее, чем желаемая частота на Земле; в частности, на 10,22999999543 МГц вместо 10,23 МГц.[18] Поскольку атомные часы на борту спутников GPS точно настроены, это делает систему практическим инженерным приложением научной теории относительности в реальной среде.[19] Размещение атомных часов на искусственных спутниках для проверки общей теории Эйнштейна было предложено Фридвардт Винтерберг в 1955 г.[20]
Расчет замедления времени
Чтобы рассчитать количество ежедневного замедления времени, которое испытывают спутники GPS относительно Земли, нам необходимо отдельно определить суммы, связанные с специальная теория относительности (скорость) и общая теория относительности (гравитация) и сложите их вместе.
Сумма из-за скорости будет определяться с помощью Преобразование Лоренца. Это будет:

Для малых значений v / c, используя биномиальное разложение это приблизительно:

Спутники GPS движутся на 3874 м / с относительно центра Земли.[18] Таким образом, мы определяем:

Эта разница ниже 1 из 8.349×10−11 представляет собой долю, на которую часы спутников движутся медленнее, чем часы Земли. Затем оно умножается на количество наносекунд в день:

То есть часы спутников теряют 7214 наносекунд в сутки из-за специальная теория относительности последствия.
- Обратите внимание, что эта скорость 3874 м / с измеряется относительно центра Земли, а не ее поверхности, где находятся приемники GPS (и пользователи). Это связано с тем, что эквипотенциал Земли делает чистое замедление времени равным по всей ее геодезической поверхности.[21] То есть комбинация специальных и общих эффектов делает чистое замедление времени на экваторе равным таковому у полюсов, которые, в свою очередь, покоятся относительно центра. Следовательно, мы используем центр как опорную точку для представления всей поверхности.
Степень расширения под действием силы тяжести будет определяться с помощью гравитационное замедление времени уравнение:

Для малых значений Мистер, используя биномиальное разложение это приблизительно:

Нас снова интересует только дробь меньше 1 и разница между Землей и спутниками. Для определения этой разницы берем:

Земля имеет радиус 6,357 км (на полюсах), что рземной шар = 6 357 000 м, а спутники имеют высоту 20 184 км.[18] делая их радиус орбиты рGPS = 26 541 000 м. Подставив их в приведенное выше уравнение, с Mземной шар = 5.974×1024, грамм = 6.674×10−11, и c = 2.998×108 (все в SI ед.), дает:

Это часть, на которую часы спутников движутся быстрее, чем часы Земли. Затем оно умножается на количество наносекунд в день:

То есть часы спутников набирают 45 850 наносекунд в день за счет общая теория относительности последствия. Эти эффекты суммируются, чтобы дать (округлено до 10 нс):
- 45850 - 7210 = 38640 нс
Таким образом, часы спутников набирают примерно 38 640 наносекунд в день или 38,6 мкс в день в целом из-за эффектов относительности.
Чтобы компенсировать это усиление, частота часов GPS должна быть уменьшена на долю:
- 5.307×10−10 – 8.349×10−11 = 4.472×10−10
Эта доля вычитается из 1 и умножается на предварительно настроенную тактовую частоту 10,23 МГц:
- (1 – 4.472×10−10) × 10.23 = 10.22999999543
То есть нам нужно замедлить частоту с 10,23 МГц до 10,22999999543 МГц, чтобы свести на нет эффекты относительности.
Искажение Саньяка
Обработка данных GPS-наблюдений также должна компенсировать Эффект Саньяка. Шкала времени GPS определяется в инерционный системы, но наблюдения обрабатываются в В центре Земли, фиксировано на Земле (совместно вращающаяся) система, система, в которой одновременность не определено однозначно. Таким образом, для преобразования инерциальной системы в систему ECEF применяется преобразование координат. Полученная коррекция времени прохождения сигнала имеет противоположные алгебраические знаки для спутников в Восточном и Западном небесных полушариях. Игнорирование этого эффекта приведет к ошибке восток-запад порядка сотен наносекунд или десятков метров в местоположении.[22]
Естественные источники помех
Поскольку сигналы GPS на наземных приемниках обычно относительно слабые, естественные радиосигналы или рассеяние сигналов GPS могут снижать чувствительность приемник, что затрудняет или делает невозможным получение и отслеживание спутниковых сигналов.
Космическая погода ухудшает работу GPS двумя способами: прямые помехи из-за всплесков солнечного радио в той же полосе частот[23] или путем рассеяния радиосигнала GPS на ионосферных неоднородностях, называемого сцинтилляцией.[24] Обе формы деградации следуют за 11-летием. солнечный цикл и максимальны при максимуме солнечных пятен, хотя они могут произойти в любое время. Солнечные радиовсплески связаны с солнечные вспышки и выбросы корональной массы (CME)[25] и их воздействие может повлиять на прием на половине Земли, обращенной к Солнцу. Сцинтилляция чаще всего возникает в тропических широтах, где это ночное явление. Это происходит реже в высоких или средних широтах, где магнитные бури могут приводить к мерцанию.[26] Помимо мерцаний, магнитные бури могут создавать сильные ионосферные градиенты, снижающие точность систем SBAS.[27]
Искусственные источники помех
В автомобильных GPS-приемниках металлические детали на лобовых стеклах,[28] например, антиобледенители или тонировочные пленки для автомобильных стекол[29] может действовать как Клетка Фарадея, унизительный прием прямо в машине.
Рукотворный EMI (электромагнитные помехи) также могут нарушить или варенье Сигналы GPS. В одном хорошо задокументированном случае невозможно было принимать сигналы GPS во всей гавани Моховая посадка, Калифорния из-за непреднамеренных помех, вызванных неисправностью предварительных усилителей телевизионной антенны.[30][31] Также возможно преднамеренное заклинивание. Как правило, более сильные сигналы могут создавать помехи для приемников GPS, когда они находятся в пределах радиосвязи или в пределах прямой видимости. В 2002 году в онлайн-журнале было опубликовано подробное описание того, как построить глушитель GPS L1 C / A ближнего действия. Phrack.[32]
В правительство США считает, что такие глушилки иногда использовались во время Война в Афганистане, а военные США утверждают, что уничтожили шесть глушителей GPS во время Война в Ираке, в том числе тот, который был уничтожен бомбой с наведением GPS.[33] Глушитель GPS относительно легко обнаружить и найти, что делает его привлекательной целью для противорадиационные ракеты. 7 и 8 июня 2007 года Министерство обороны Великобритании провело испытания системы постановки помех в западной части Великобритании.[нужна цитата ]
В некоторых странах разрешено использование ретрансляторов GPS для приема сигналов GPS в помещении и в недоступных местах; в то время как в других странах это запрещено, поскольку ретранслируемые сигналы могут вызывать многолучевые помехи для других приемников GPS, которые получают данные как от спутников GPS, так и от ретранслятора. В Великобритании Ofcom теперь разрешает использование репитеров GPS / GNSS.[34] в режиме «облегченного лицензирования».
Из-за возможности возникновения как естественного, так и искусственного шума продолжают развиваться многочисленные методы устранения помех. Первое - не полагаться на GPS как на единственный источник. По словам Джона Рули, "IFR у пилотов должен быть запасной план на случай отказа GPS ».[35] Автономный мониторинг целостности приемника (RAIM) - это функция, включенная в некоторые приемники, предназначенная для предупреждения пользователя при обнаружении помех или другой проблемы. Американские военные также развернули с 2004 г. Модуль выборочной доступности / защиты от спуфинга (SAASM) в Усовершенствованный GPS-приемник Defense (ДАГР).[36] В демонстрационных видеороликах было показано, что DAGR обнаруживает помехи и сохраняет свою блокировку на зашифрованных сигналах GPS во время помех, из-за которых гражданские приемники теряют захват.
Смотрите также
Примечания
- ^ Тот же принцип и лежащая в его основе математика можно найти в описании хронометраж пульсаров астрономами.
- ^ Navipedia: Мониторинг тропосферы
- ^ Navipedia: задержка тропосферы
- ^ Navipedia: Multipath
- ^ Отчет о ходе работы IPN 42-159 (2004)
- ^ SNT080408. "Пример эфемеридного сервера". Tdc.co.uk. Архивировано из оригинал 12 января 2009 г.. Получено 2009-10-13.
- ^ «Блок 1 - Введение в GPS». Архивировано из оригинал 29 апреля 2009 г.
- ^ «Введение в пользовательское оборудование NAVSTAR GPS» (PDF). Центр навигации береговой охраны США. Береговая охрана США. Сентябрь 1996. Получено 5 июля, 2014.
- ^ Паркинсон (1996)
- ^ Grewal (2001), стр. 103.
- ^ «Президент Клинтон приказывает прекратить выборочную доступность GPS».
- ^ а б «Заявление президента относительно решения США прекратить снижение точности глобальной системы позиционирования». Федеральная авиационная администрация. 1 мая 2000 г.. Получено 2013-01-04.
- ^ «DoD навсегда прекращает закупку выборочной доступности глобальной системы позиционирования». DefenseLink. 18 сентября 2007 г. Архивировано с оригинал 18 февраля 2008 г.. Получено 2008-02-20.
- ^ «Выборочная доступность». Национальный космический исполнительный комитет по позиционированию, навигации и хронометражу. Архивировано из оригинал 13 января 2008 г.. Получено 2008-02-20.
- ^ Уэбб (2004), стр. 32.
- ^ Ризос, Крис. Университет Нового Южного Уэльса. Спутниковые сигналы GPS В архиве 2010-06-12 на Wayback Machine. 1999.
- ^ Фараони, Валерио (2013). Специальная теория относительности (иллюстрированный ред.). Springer Science & Business Media. п. 54. ISBN 978-3-319-01107-3. Выдержка страницы 54
- ^ а б c Глобальная система позиционирования Роберта А. Нельсона через спутник, Ноябрь 1999 г.
- ^ Погге, Ричард В .; «Реальная теория относительности: система навигации GPS». Проверено 25 января 2008 года.
- ^ "Astronautica Acta II, 25 (1956)". 1956-08-10. Получено 2009-10-23.
- ^ С. П. Дрейк (январь 2006 г.). «Принцип эквивалентности как ступенька от специальной теории относительности к общей» (PDF). Являюсь. J. Phys., Vol. 74, №1. С. 22–25.
- ^ Эшби, Нил Относительность и GPS. Физика сегодня, Май 2002 г.
- ^ Черрути А., П. М. Кинтнер, Д. Э. Гэри, А. Дж. Маннуччи, Р. Ф. Мейер, П. Х. Доэрти и А. Дж. Костер (2008), Влияние интенсивных солнечных радиовсплесков в декабре 2006 г. на приемники GPS, Космическая погода, Дои:10.1029 / 2007SW000375, 19 октября 2008 г.
- ^ Аарон, Жюль; Басу, Сантимей (1994). «Ионосферные амплитудные и фазовые флуктуации на частотах GPS». Труды ION GPS. 2: 1569–1578.
- ^ С. Манкузо и Дж. К. Раймонд, "Корональные транзиенты и метрические радиовсплески типа II. I. Эффекты геометрии, 2004 г., Астрономия и астрофизика, т. 413, стр. 363-371"
- ^ Ледвина, Б. М .; Дж. Дж. Макела и П. М. Кинтнер (2002). «Первые наблюдения интенсивных мерцаний амплитуды GPS L1 на средних широтах». Письма о геофизических исследованиях. 29 (14): 1659. Bibcode:2002GeoRL..29.1659L. Дои:10.1029 / 2002GL014770.
- ^ Том Диль, Солнечные вспышки поражают Землю - WAAS изгибается, но не ломается, Новости спутниковой навигации, том 23, июнь 2004 г.
- ^ «Крепление I-PASS для автомобилей с особыми функциями лобового стекла» (PDF). Архивировано из оригинал (PDF) 26 марта 2010 г.
- ^ «3М Автомобильные пленки».. Обратите внимание, что пленки со стабильным цветом специально описаны как нет создание помех спутниковым сигналам.
- ^ "Охота на RFI". GPS мир. 1 января 2003 г.
- ^ "Клуб соответствия требованиям EMC" банановые кожуры "колонка 222". Compliance-club.com. Получено 2009-10-13.
- ^ Недорогой портативный глушитель GPS. Phrack выпуск 0x3c (60), статья 13. Опубликовано 28 декабря 2002 г.
- ^ Пресс-служба американских войск. Прогресс Centcom. 25 марта 2003 г. В архиве 3 декабря 2009 г. Wayback Machine
- ^ [1] Заявление Ofcom о режиме авторизации для ретрансляторов GNSS
- ^ Рули, Джон. AVweb. Глушение GPS. 12 февраля 2003 г.
- ^ Страница DAGR армии США В архиве 2012-08-05 в Archive.today
Рекомендации
- Grewal, Mohinder S .; Вайль, Лоуренс Рэндольф; Эндрюс, Ангус П. (2001). Системы глобального позиционирования, инерциальная навигация и интеграция. Джон Уайли и сыновья. ISBN 978-0-47135-032-3.
- Паркинсон; Спилкер (1996). Система глобального позиционирования. Американский институт аэронавтики и астрономии. ISBN 978-1-56347-106-3.
- Уэбб, Стивен (2004). Не из этого мира: сталкивающиеся вселенные, браны, струны и другие дикие идеи современной физики. Springer. ISBN 0-387-02930-3. Получено 2013-08-16.
внешняя ссылка
- GPS.gov —Общий веб-сайт общественного образования, созданный правительством США.
- Стандарт производительности GPS SPS - Официальная спецификация стандартной службы позиционирования (версия 2008 г.).
- Стандарт производительности GPS SPS - Официальная спецификация стандартной службы позиционирования (версия 2001 г.).