Рыбий плавник - Fish fin
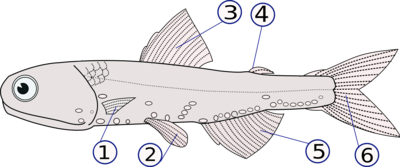
(1) грудные плавники (парные), (2) тазовые плавники (парные), (3) спинной плавник,
(4) жировой плавник, (5) анальный плавник, (6) хвостовой (хвостовой) плавник
Плавники обычно являются наиболее отличительными анатомическими особенностями рыбы. Они состоят из костлявых шипы или лучи выступающий из тела с кожа покрывая их и соединяя их вместе, либо перепончатым способом, как видно на большинстве костлявая рыба, или аналогичный флиппер, как видно в акулы. Помимо хвоста или хвостовой плавник, рыбьи плавники не имеют прямой связи с позвоночник и поддерживаются только мышцы. Их основная функция - помогать рыбе плавать.
Плавники, расположенные в разных местах на рыбе, служат разным целям, таким как движение вперед, поворот, удержание вертикального положения или остановка. Большинство рыб плавают с плавниками, летучая рыба использовать грудные плавники для скольжения, и рыба-лягушка используйте их для ползания. Ласты можно использовать и для других целей; мужской акулы и москит использовать модифицированный плавник для доставки спермы, акулы-молотилки использовать хвостовой плавник, чтобы оглушить добычу, рифовая каменная рыба в спинных плавниках есть шипы, через которые впрыскивается яд, удильщик использовать первый шип спинного плавника как удочку, чтобы заманить добычу; спинорог избегать хищники вжимаясь в коралловые щели и используя шипы в плавниках, чтобы зафиксироваться на месте.
Типы
Для каждого типа плавников существует ряд видов рыб, у которых этот плавник был утрачен в процессе эволюции.
| Грудные плавники |  | Парные грудные плавники расположены с каждой стороны, обычно хранятся в сложенном виде сразу за крышечкой, и гомологичный к передним конечностям четвероногие.
|
|---|---|---|
| Тазовые плавники (Брюшные плавники) |  | Парные тазовый или брюшные плавники обычно расположены вентрально ниже и позади грудных плавников, хотя во многих семействах рыб они могут располагаться перед грудными плавниками (например, трески). Они есть гомологичный к задним конечностям четвероногие. Тазовый плавник помогает рыбе подниматься или опускаться по воде, резко поворачиваясь и быстро останавливаясь.
|
| Спинной плавник |  |  Спинной плавник голавля (Leuciscus cephalus ) Спинные плавники расположены на спине. У рыбы может быть до трех спинных плавников. Спинные плавники служат для защиты рыбы от перекатывания и помогают ей при резких поворотах и остановках.
|
| Анальный / клоакальный плавник |  | В анальный / клоакальный плавник расположен на вентральный поверхность за анус /клоака. Этот плавник используется для стабилизации рыбы во время плавания. |
| Жировой плавник |  | В жировой плавник это мягкий мясистый плавник, расположенный на спине за спинным плавником и прямо перед ним. Он отсутствует во многих семействах рыб, но обнаружен в девяти из 31 семейств. эвтелеостов заказы (Percopsiformes, Myctophiformes, Aulopiformes, Stomiiformes, Лососевые, Osmeriformes, Characiformes, Силурообразные и Аргентинообразные ).[3] Известные представители этих орденов лосось, харакиды и сом. Функция жирового плавника остается загадкой. Его часто обрезают, чтобы пометить выращенную в заводских условиях рыбу, хотя данные 2005 года показали, что форель с удаленным жировым плавником имеет на 8% более высокую частоту ударов хвостом.[4][5] Дополнительная информация, опубликованная в 2011 году, предполагает, что плавник может иметь жизненно важное значение для обнаружения и реакции на раздражители, такие как прикосновение, звук и изменения давления. Канадские исследователи определили нейронную сеть в плавнике, указав, что она, вероятно, выполняет сенсорную функцию, но до сих пор не уверены, каковы будут последствия ее удаления.[6][7] Сравнительное исследование, проведенное в 2013 году, показало, что жировой плавник может развиваться двумя разными способами. Один из них относится к типу лососевых, при котором жировой плавник развивается из личино-плавниковой складки одновременно и таким же прямым образом, как и другие срединные плавники. Другой способ - характерный, при котором жировой плавник развивается поздно, после того, как личиночно-плавниковая складка уменьшилась и другие срединные плавники развились. Они утверждают, что наличие характерного типа развития предполагает, что жировой плавник - это не «просто остаток складки личиночного плавника», и не согласуется с точкой зрения, что жировой плавник не функционирует.[3] Исследование, опубликованное в 2014 году, показывает, что жировой плавник неоднократно развивался в отдельных линиях.[8] |
| Хвостовой плавник (Хвостовой плавник) | 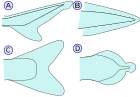  | В хвостовой плавник хвостовой плавник (от лат. кауда имеется в виду хвост), расположенный на конце хвостового стебля и используемый для движения. Увидеть движение тело-хвостовой плавник. (А) - Гетероцеркальный означает, что позвонки переходят в верхнюю долю хвоста, делая его длиннее (как в акулы ). Это противоположность гипоцеркальному. (В) - Протоцеркальный означает, что позвонки доходят до кончика хвоста, а хвост симметричен, но не расширен (как в амфиокс ) (С) - Гомоцеркальный где плавник внешне кажется симметричным, но на самом деле позвонки проходят на очень короткое расстояние в верхнюю долю плавника (D) - Дифицеркальный означает, что позвонки доходят до кончика хвоста, а хвост симметричен и расширен (как в бичир, двоякодышащая рыба, минога и латимерия ). Наиболее Палеозойский у рыб был дифицеркальный гетероцеркальный хвост.[10] Самые современные рыбы (костистые кости ) имеют гомоцеркальный хвост. Они бывают разных форм и могут появиться:
|
| Хвостовой киль Финлеты |  | Некоторые виды быстро плавающих рыб имеют горизонтальный хвостовой киль прямо перед хвостовым плавником. Как и киль На корабле это боковой гребень на хвостовом стебле, обычно состоящий из щитков (см. ниже), который обеспечивает устойчивость и поддержку хвостового плавника. Может быть один парный киль, по одному с каждой стороны, или две пары сверху и снизу. Финлеты небольшие плавники, обычно позади спинного и анального плавников (в бихиры, на спинной поверхности есть только плавники, а спинной плавник отсутствует). У некоторых рыб, таких как тунец или сайры, они не имеют лучей, не выдвигаются и находятся между последним спинным и / или анальным плавниками и хвостовым плавником. |
Костные рыбы

Костные рыбы сформировать таксономический группа под названием Osteichthyes. У них есть костяные скелеты, и их можно противопоставить хрящевые рыбы у которых есть скелеты из хрящ. Костные рыбы делятся на ребристый и рыба с лопастными плавниками. Большинство рыб имеют лучевые плавники - чрезвычайно разнообразную и многочисленную группу, состоящую из более чем 30 000 видов. Это самый большой класс позвоночных из существующих сегодня. В далеком прошлом рыба с лопастными плавниками была в изобилии. В настоящее время они в основном вымерли, осталось всего восемь видов. У костистых рыб есть плавники и лучи, называемые лепидотрихиями. У них обычно есть плавательные пузыри, что позволяет рыбе создавать нейтральный баланс между погружением и плаванием без использования плавников. Однако плавательные пузыри отсутствуют у многих рыб, особенно у Двудомные рыбы, которые являются единственной рыбой, сохранившей примитивные легкие, присутствующие у общего предка костистых рыб, от которых произошли плавательные пузыри. Костные рыбы также обладают крышка, что помогает им дышать без использования ласт для плавания.
Лопаточный плавник

Рыбы с лопастными плавниками сформировать класс костлявые рыбы называется Sarcopterygii. У них мясистые, дольчатый, парные плавники, которые соединяются с телом одной костью.[11] Плавники рыб с лопастными плавниками отличаются от плавников всех остальных рыб тем, что каждый имеет мясистый, лопастевидный чешуйчатый стебель, отходящий от тела. Грудной и тазовые плавники имеют сочленения, напоминающие суставы конечностей четвероногих. Эти плавники превратились в ноги первых четвероногих наземных позвоночных, амфибии. У них также есть два спинных плавника с отдельными основаниями, в отличие от одного спинного плавника. рыба с плавниками.
В латимерия это рыба с лопастными плавниками, которая сохранилась до наших дней. Считается, что примерно 408 миллионов лет назад, в раннем девоне, он превратился примерно в свою нынешнюю форму.[12] Передвижение латимерии уникально для их вида. Чтобы передвигаться, латимерия чаще всего пользуется преимуществами восходящего или нисходящего течения и дрейфа. Они используют свои парные плавники, чтобы стабилизировать движение в воде. На дне океана их парные плавники не используются ни для каких движений. Целаканты могут создавать тягу для быстрого старта с помощью хвостовых плавников. Благодаря большому количеству плавников, латимерии обладают высокой маневренностью и могут ориентировать свое тело практически в любом направлении в воде. Они были замечены в стойках на голове и плавании животом вверх. Считается, что их ростральный орган помогает латимерию обрести электроповосприятие, которое помогает им перемещаться вокруг препятствий.[13]
Лучеплавник

Рыбы со скатными плавниками сформировать класс костлявые рыбы называется Actinopterygii. Их плавники содержат шипы или лучи. Плавник может содержать только колючие лучи, только мягкие лучи или их комбинацию. Если присутствуют оба, колючие лучи всегда передний. Шипы обычно жесткие и острые. Лучи обычно мягкие, гибкие, сегментированные и могут быть разветвленными. Эта сегментация лучей является основным отличием, отделяющим их от шипов; у некоторых видов шипы могут быть гибкими, но никогда не будут сегментированы.
Шипы имеют множество применений. В сом, они используются как форма защиты; у многих сомов есть способность запирать свои шипы наружу. Спинорог также используйте шипы, чтобы запираться в щелях, чтобы их не вытащили.
Лепидотрихии обычно состоят из кость, но в начале остейхтианы такие как Хейролепис, было также дентин и эмаль.[14] Они сегментированы и выглядят как набор дисков, установленных один на другой. Возможно, они произошли от кожных чешуек.[14] Считается, что генетическая основа формирования лучей плавников - это гены, кодирующие производство определенных белков. Было высказано предположение, что эволюция конечностей четвероногих рыб с лопастными плавниками связана с потерей этих белков.[15]
Хрящевые рыбы


Хрящевые рыбы образуют класс рыб под названием Chondrichthyes. У них есть скелеты из хрящ скорее, чем кость. В класс входят акулы, лучи и химеры. Скелеты акульих плавников удлинены и поддерживаются мягкими и несегментированными лучами, называемыми цератотрихиями, нитями эластичного белка, напоминающими роговые. кератин в волосах и перьях.[16] Первоначально грудной и тазовый пояса, не содержащие никаких кожных элементов, не соединялись. В более поздних формах каждая пара плавников стала соединяться вентрально посередине, когда развились скапулокоракоидные и лобковидные перемычки. В лучи грудные плавники соединены с головой и очень гибкие. Одной из основных характеристик большинства акул является гетероцеркальный хвост, который помогает при передвижении.[17] У большинства акул восемь плавников. Акулы могут удаляться только от объектов прямо перед ними, потому что их плавники не позволяют им двигаться в направлении хвоста вперед.[18]
Как и у большинства рыб, хвосты акул обеспечивают толчок, делая скорость и ускорение зависимыми от формы хвоста. Хвостовой плавник формы значительно различаются между видами акул из-за их эволюции в разных средах. Акулы обладают гетероцеркальный хвостовой плавник, в котором спинной порция обычно заметно больше, чем вентральный часть. Это потому, что акула позвоночник простирается в эту спинную часть, обеспечивая большую площадь поверхности для мышца привязанность. Это позволяет более эффективно движение среди них отрицательно жизнерадостный хрящевые рыбы. Напротив, большинство костистых рыб обладают гомоцеркальный хвостовой плавник.[19]
Тигровые акулы иметь большой верх мочка, что позволяет использовать медленное движение и резкие скачки скорости. Тигровая акула должна легко поворачиваться в воде во время охоты, чтобы поддерживать свой разнообразный рацион, в то время как белоснежная акула, который охотится на стайную рыбу, такую как скумбрия и сельдь, имеет большую нижнюю лопасть, чтобы не отставать от быстро плывущей добычи.[20] Другие приспособления хвоста помогают акулам более прямо ловить добычу, например, молотильная акула его мощная удлиненная верхняя доля используется для оглушения рыб и кальмаров.
Создание тяги
Фольга сформированный плавники генерировать толчок при движении подъем плавника приводит в движение воду или воздух и толкает плавник в противоположном направлении. Водные животные становятся значительными толчок перемещая ласты вперед и назад в воде. Часто хвостовой плавник используется, но некоторые водные животные создают тягу от грудные плавники.[21]



Кавитация возникает, когда отрицательное давление вызывает образование пузырьков (полостей) в жидкости, которые затем быстро и резко схлопываются. Это может вызвать значительные повреждения и износ.[22] Кавитация может повредить хвостовые плавники сильных плавающих морских животных, таких как дельфины и тунцы. Кавитация более вероятна у поверхности океана, где давление воды в окружающей среде относительно низкое. Даже если у дельфинов есть способность плавать быстрее, им, возможно, придется ограничить свою скорость, потому что схлопывание кавитационных пузырей на их хвосте слишком болезненно.[23] Кавитация также замедляет тунца, но по другой причине. В отличие от дельфинов, эти рыбы не чувствуют пузырьков, потому что у них костлявые плавники без нервных окончаний. Тем не менее, они не могут плавать быстрее, потому что кавитационные пузыри создают вокруг их плавников паровую пленку, которая ограничивает их скорость. На тунце были обнаружены повреждения, соответствующие кавитационным повреждениям.[23]
Scombrid рыбы (тунец, скумбрия и скумбрия) являются особенно хорошими пловцами. Вдоль края в задней части их тел проходит линия маленьких неубирающихся плавников без лучей, известных как плавники. Было много предположений о функции этих плавников. Исследования, проведенные в 2000 и 2001 годах Науэном и Лаудером, показали, что «плавники оказывают гидродинамическое воздействие на локальный поток во время устойчивого плавания» и что «самый задний плавник ориентирован так, чтобы перенаправлять поток в развивающийся хвостовой вихрь, что может увеличить тягу, создаваемую хвост плавательной скумбрии ».[24][25][26]
Рыбы используют несколько плавников, поэтому возможно, что один плавник может гидродинамически взаимодействовать с другим плавником. В частности, плавники непосредственно перед хвостовым (хвостовым) плавниками могут быть ближайшими плавниками, которые могут напрямую влиять на динамику потока в хвостовом плавнике. В 2011 году исследователи, использующие объемное изображение Методы смогли создать «первые мгновенные трехмерные изображения структур спутного следа, которые создаются свободно плавающими рыбами». Они обнаружили, что «непрерывные удары хвостом привели к образованию связанной цепочки вихревых колец» и что «следы спинного и анального плавников быстро увлекаются следом хвостового плавника, примерно в пределах периода времени последующего удара хвостом».[27]
Контроль движения
Как только движение установлено, им можно управлять с помощью других плавников.[21][28]



Тела рифовые рыбы часто имеют форму, отличную от рыбы в открытой воде. Рыбы в открытой воде обычно созданы для скорости, обтекаемой, как торпеды, чтобы минимизировать трение при движении по воде. Рифовые рыбы обитают в относительно ограниченных пространствах и сложных подводных ландшафтах. коралловые рифы. Поскольку эта маневренность более важна, чем скорость по прямой, поэтому рыбы коралловых рифов развили тела, которые оптимизируют их способность метаться и изменять направление. Они перехитрили хищников, уклоняясь от трещин на рифе или играя в прятки вокруг коралловых голов.[32] Грудные и брюшные плавники многих рифовых рыб, таких как рыба-бабочка, проклятый и рыба-ангел, эволюционировали, поэтому они могут действовать как тормоза и позволять выполнять сложные маневры.[34] Многие рифовые рыбы, такие как рыба-бабочка, проклятый и рыба-ангел, развились тела, которые являются глубокими и сжатыми с боков, как блин, и вписываются в трещины в скалах. Их тазовые и грудные плавники эволюционировали по-разному, поэтому они действуют вместе со сплющенным телом, оптимизируя маневренность.[32] Некоторые рыбы, такие как рыба фугу, рыба и хобот, полагаются на грудные плавники при плавании и почти не используют хвостовые плавники.[34]
Размножение


мужчина хрящевые рыбы (акулы и скаты), а также самцы некоторых живородящих рыба с плавниками, имеют плавники, которые были изменены, чтобы функционировать как внутренние органы, репродуктивные придатки, которые позволяют внутреннее оплодотворение. У луко-плавниковых рыб их называют гоноподии или андроподии, а у хрящевых рыб их называют застежки.
Гоноподии встречаются у самцов некоторых видов в Anablepidae и Poeciliidae семьи. Это анальные плавники, которые были модифицированы для работы в качестве подвижных интромитентных органов и используются для оплодотворения самок. молока во время вязки. Третий, четвертый и пятый лучи анального плавника самца образуют трубчатую структуру, в которую выбрасывается сперма рыбы.[37] Когда гоноподий готов к спариванию, он становится прямостоячим и направлен вперед в сторону самки. Вскоре самец вставляет орган в половое отверстие самки с помощью крючкообразных приспособлений, которые позволяют рыбе хвататься за самку для обеспечения оплодотворения. Если самка остается неподвижной, а ее партнер контактирует с ее желудочно-кишечным трактом своим гоноподием, она оплодотворяется. Сперма сохраняется в яйцеводе самки. Это позволяет самкам оплодотворять себя в любое время без дополнительной помощи самцов. У некоторых видов гоноподий может составлять половину общей длины тела. Иногда плавник бывает слишком длинным, чтобы его можно было использовать, как у лирохвостых пород. Xiphophorus helleri. У женщин, получавших гормональные препараты, могут развиться гоноподии. Они бесполезны для разведения.
Подобные органы с аналогичными характеристиками встречаются у других рыб, например у андроподиум в Хемирхамфодон или в Goodeidae.[38]
Застежки встречаются у мужчин хрящевые рыбы. Они представляют собой заднюю часть тазовых плавников, которые также были изменены, чтобы функционировать как интромитентные органы, и используются для направления спермы в самки. клоака во время совокупления. Акт спаривания у акул обычно включает поднятие одной из кламмеров, чтобы вода попала в сифон через определенный отверстие. Затем застежка вставляется в клоаку, где она открывается, как зонтик, чтобы закрепить ее положение. Затем сифон начинает сокращаться, вытесняя воду и сперму.[39][40]
Другое использование
В Индо-тихоокеанский парусник имеет выступающий спинной плавник. подобно скомброиды и другие морская рыба, они обтекают себя, втягивая спинные плавники в желобки на теле во время плавания.[41] Огромный спинной плавник или парус парусника большую часть времени втянут. Парусник выращивает их, если они хотят пасти стайку мелких рыбок, а также после периодов высокой активности, предположительно, чтобы остыть.[41][42]



В восточная летучая мышь имеет большие грудные плавники, которые он обычно прижимает к своему телу, и расширяется, когда ему угрожают напугать хищников. Несмотря на свое название, это демерсальная рыба, а не летучая рыба, и использует свои тазовые плавники, чтобы ходить по дну океана.[44][45]
Плавники могут иметь приспособительное значение как сексуальные украшения. Во время ухаживания самка цихлида, Pelvicachromis taeniatus, отображает крупный и привлекательный фиолетовый тазовый плавник. «Исследователи обнаружили, что самцы явно предпочитают самок с большим тазовым плавником, а тазовые плавники у самок росли более непропорционально, чем другие плавники».[46][47]




Эволюция
Эволюция парных плавников
Существуют две преобладающие гипотезы, которые исторически обсуждались как модели эволюции парных плавников у рыб: теория жаберных дуг и теория боковых плавниковых складок. Первый, обычно называемый «Гипотеза Гегенбаура, »Был основан в 1870 году и предполагает, что« парные плавники происходят от жаберных структур ».[50] Эта теория потеряла популярность в пользу теории боковых плавниковых складок, впервые предложенной в 1877 году, согласно которой парные плавники образовались из продольных боковых складок эпидермиса сразу за жабрами.[51] Обе гипотезы в летописи окаменелостей и эмбриологии слабо подтверждаются.[52] Однако недавние открытия, полученные в результате формирования паттернов развития, побудили пересмотреть обе теории, чтобы лучше выяснить происхождение парных плавников.
Классические теории
Карла Гегенбаура понятие «Архиптеригиум» было введено в 1876 году.[53] Он был описан как жаберный луч или «соединенный хрящевой стержень», который отходил от жаберной дуги. Дополнительные лучи поднимались вдоль дуги и от центрального жаберного луча. Гегенбаур предложил модель трансформирующая гомология - что все парные плавники и конечности позвоночных были преобразованиями Archipterygium. Основываясь на этой теории, парные придатки, такие как грудные и тазовые плавники, могли бы дифференцироваться от жаберных дуг и мигрировать кзади. Тем не менее, эта гипотеза получила ограниченную поддержку в летописи окаменелостей как морфологически, так и филогенетически.[52] Кроме того, практически не было доказательств передне-задней миграции тазовых плавников.[54] Такие недостатки теории жаберных дуг привели к ее раннему упадку в пользу теории боковых плавниковых складок, предложенной Сент-Джордж Джексон Миварт, Фрэнсис Бальфур, и Джеймс Кингсли Тэчер.
Теория боковой плавниковой складки выдвинула гипотезу о том, что парные плавники образовались из боковых складок вдоль стенки тела рыбы.[55] Подобно тому, как сегментация и почкование средней плавниковой складки дало начало срединным плавникам, аналогичный механизм сегментации и удлинения плавниковых зачатков из боковой плавниковой складки был предложен, чтобы дать начало парным грудным и брюшным плавникам. Однако в летописи окаменелостей было мало свидетельств перехода от боковой складки к плавнику.[56] Кроме того, позже филогенетически было продемонстрировано, что грудные и брюшные плавники имеют разные эволюционные и механистические корни.[52]
Эволюционная биология развития
Недавние исследования онтогенеза и эволюции парных придатков сравнили позвоночных без плавников, таких как миноги - с участием хондрики, самое низкое из ныне живущих позвоночных с парными плавниками.[57] В 2006 году исследователи обнаружили, что такое же генетическое программирование, участвующее в сегментации и развитии срединных плавников, было обнаружено в развитии парных придатков у кошачьи акулы.[58] Хотя эти находки не подтверждают напрямую гипотезу латеральной плавниковой складки, оригинальная концепция механизма эволюционного развития общих срединных парных плавников остается актуальной.
Подобное обновление старой теории можно найти в программировании развития хондриктиновых жаберных дуг и парных придатков. В 2009 г. исследователи Чикагский университет продемонстрировали, что существуют общие механизмы формирования молекулярного паттерна в раннем развитии хондриктиновой жаберной дуги и парных плавников.[59] Подобные открытия побудили пересмотреть некогда опровергнутую теорию жаберных дуг.[56]
От плавников до конечностей
Рыбы - предки всех млекопитающих, рептилий, птиц и земноводных.[60] В частности, наземные четвероногие (четвероногие животные) произошли от рыб и совершили свои первые набеги на сушу 400 миллионов лет назад.[61] Для передвижения они использовали парные грудные и тазовые плавники. Грудные плавники превратились в передние конечности (руки у людей), а тазовые плавники - в задние.[62] Большая часть генетического механизма, который формирует ходячие конечности четвероногих, уже присутствует в плавниках рыб.[63][64]
- Аристотель, De incessu animalium [65]


В 2011 году исследователи из Университет Монаша в Австралии использовались примитивные, но все еще живые двоякодышащая рыба «проследить эволюцию мышц тазового плавника, чтобы выяснить, как развивались несущие нагрузку задние конечности четвероногих».[66][67] Дальнейшие исследования в Чикагском университете показали, что ходящие по дну двоякодышащие рыбы уже развили характеристики походки наземных четвероногих.[68][69]
В классическом примере конвергентная эволюция, грудные конечности птерозавры, птицы и летучие мыши далее независимыми путями эволюционировали в летающие крылья. Даже у летающих крыльев есть много общего с ходячими ногами, и основные аспекты генетической модели грудного плавника были сохранены.[70][71]
Первые млекопитающие появились в Пермский период период (между 298,9 и 252,17 миллионов лет назад). Несколько групп этих млекопитающих начали возвращаться в море, в том числе китообразные (киты, дельфины и морские свиньи). Недавний анализ ДНК предполагает, что китообразные произошли внутри копытные, и что у них есть общий предок с бегемот.[72][73] Около 23 миллионов лет назад другая группа медвежьих наземных млекопитающих начала возвращаться в море. Это были уплотнения.[74] То, что превратилось в ходячие конечности у китообразных и тюленей, независимо превратилось в новые формы плавников. Передние конечности стали ласты, а задние конечности были потеряны (китообразные) или также превратились в ласты (ластоногие). У китообразных хвост имеет на конце два плавника, которые называются случайность.[75] Хвосты рыб обычно вертикальные и двигаются из стороны в сторону. Сосальщики китообразных расположены горизонтально и двигаются вверх и вниз, потому что шипы китообразных изгибаются так же, как и у других млекопитающих.[76][77]

Ихтиозавры древние рептилии, похожие на дельфинов. Впервые они появились около 245 миллионов лет назад и исчезли около 90 миллионов лет назад.
"Эта морская рептилия с наземными предками так сильно сблизилась с рыбами, что фактически эволюционировала спинной плавник и хвостовой плавник для улучшения передвижения в воде. Эти структуры тем более примечательны, что они возникли из ничего - у древних наземных рептилий не было ни горба на спине, ни лезвия на хвосте, которые служили бы предшественником ».[78]
Биолог Стивен Джей Гулд сказал, что ихтиозавр был его любимым примером конвергентная эволюция.[79]
Плавники или ласты разной формы и в разных местах (конечности, тело, хвост) также эволюционировали в ряде других групп четвероногих, включая ныряющих птиц, таких как пингвины (измененные из крыльев), морские черепахи (передние конечности, преобразованные в ласты), мозазавры. (конечности превращены в ласты) и морские змеи (вертикально расширенный, сплющенный хвостовой плавник).
Роботизированные плавники

Использование ласт для движущая сила водных животных могут быть очень эффективными. Было подсчитано, что некоторые рыбы могут достигать движущий КПД более 90%.[21] Рыба может ускоряться и маневрировать намного эффективнее, чем лодки или подводная лодка, и производят меньше беспокойства от воды и шума. Это привело к биомиметик исследования подводных роботов, которые пытаются имитировать передвижение водных животных.[81] Примером может служить робот-тунец, построенный Институт полевой робототехники, анализировать и математически моделировать грозообразное движение.[82] В 2005 г. Лондонский аквариум Sea Life продемонстрировал трех роботизированных рыбок, созданных отделом информатики в Университет Эссекса. Рыба была разработана так, чтобы быть автономной, плавать и избегать препятствий, как настоящая рыба. Их создатель утверждал, что пытался совместить «скорость тунца, ускорение щуки и навигационные навыки угря».[83][84][85]
В АкваПингвин, разработан Festo Германии, копирует обтекаемую форму и движение передними ластами пингвины.[86][87] Festo также разработала AquaRay,[88] AquaJelly[89] и AiraCuda,[90] соответственно имитирует движение скатов манты, медуз и барракуд.
В 2004 г. Хью Герр в Массачусетском технологическом институте создали прототип биомехатронный Роботизированная рыба с живым привод путем хирургической трансплантации мышц с лягушачьих лап роботу и последующего плавания робота путем воздействия на мышечные волокна электричеством.[91][92]
Роботизированные рыбы предлагают некоторые исследовательские преимущества, такие как возможность исследовать отдельную часть конструкции рыбы отдельно от остальной рыбы. Однако это может привести к чрезмерному упрощению биологии и упустить из виду ключевые аспекты дизайна животных. Роботы-рыбы также позволяют исследователям изменять один параметр, например гибкость или конкретное управление движением. Исследователи могут напрямую измерять силы, что непросто сделать с живой рыбой. «Роботизированные устройства также облегчают трехмерные кинематические исследования и коррелированный гидродинамический анализ, так как можно точно знать местоположение локомоторной поверхности. Кроме того, можно запрограммировать отдельные компоненты естественного движения (например, обратный ход или шаг взмахивающего отростка) отдельно, чего, конечно, трудно добиться при работе с живым животным ».[93]
Разнообразие плавников








Смотрите также
- Плавник головоногих
- Плавник и движение ласт
- Передвижение рыб
- Полидактилия у ранних четвероногих
- Роботунец
- Суп из акульих плавников
- Компромиссы для передвижения в воздухе и воде
- Волнообразное движение
использованная литература
Цитаты
- ^ Станден, Э.М. (2009). «Мышечная активность и гидродинамическая функция тазовых плавников форели. (Oncorhynchus mykiss)". Журнал экспериментальной биологии. 213 (5): 831–841. Дои:10.1242 / jeb.033084. PMID 20154199.
- ^ Джин Хелфман, Брюс Коллетт, Дуглас Фейси и Брайан Боуэн. (2009) Разнообразие рыб: биология, эволюция и экология. Джон Вили и сыновья.
- ^ а б Бендер, Анке; Мориц, Тимо (01.09.2013). «Остаток развития и новизна развития - разные способы образования жирового плавника в онтогенезе». Зоосистематика и эволюция. 89 (2): 209–214. Дои:10.1002 / зоопарки.201300007. ISSN 1860-0743.
- ^ Тителл, Э. (2005). "Загадочный толстый плавник". Журнал экспериментальной биологии. 208 (1): v. Дои:10.1242 / jeb.01391.
- ^ Reimchen, T. E; Темпл, N F (2004). «Гидродинамические и филогенетические аспекты жирового плавника рыб». Канадский журнал зоологии. 82 (6): 910–916. Дои:10.1139 / Z04-069.
- ^ Храм, Никола (18 июля 2011 г.). «Удаление форели, плавник лосося задевает нерв». Космос. Архивировано из оригинал 12 января 2014 г.
- ^ Бакленд-Никс, Дж. А .; Gillis, M .; Реймхен, Т. Э. (2011). «Нейронная сеть обнаружила предполагаемый рудиментарный признак: ультраструктуру жирового плавника лосося». Труды Королевского общества B: биологические науки. 279 (1728): 553–563. Дои:10.1098 / rspb.2011.1009. ЧВК 3234561. PMID 21733904.
- ^ Стюарт, Томас А .; Смит, У. Лео; Коутс, Майкл И. (2014). «Происхождение жировых плавников: анализ гомоплазии и серийной гомологии придатков позвоночных». Труды Королевского общества B: биологические науки. 281 (1781): 20133120. Дои:10.1098 / rspb.2013.3120. ЧВК 3953844. PMID 24598422.
- ^ Хайман, Либби (1992). Сравнительная анатомия позвоночных Хаймана (3-е изд.). Издательство Чикагского университета. п. 210. ISBN 978-0226870137. Получено 18 октября 2018.
- ^ фон Циттель К.А., Вудворд А.С. и Шлоссер М. (1932) Учебник палеонтологии Том 2, Macmillan and Company. Стр.13.
- ^ Клак, Дж. А. (2002) Набирать силу. Университет Индианы
- ^ Йохансон, Зерина; Лонг, Джон А .; Талант, Джон А .; Жанвье, Филипп; Уоррен, Джеймс У. (2006). «Древнейшая целакант из раннего девона Австралии». Письма о биологии. 2 (3): 443–46. Дои:10.1098 / rsbl.2006.0470. ЧВК 1686207. PMID 17148426.
- ^ Фрике, Ганс; Рейнике, Олаф; Хофер, Гериберт; Нахтигаль, Вернер (1987). «Передвижение латимерии Latimeria Chalumnae в естественной среде обитания». Природа. 329 (6137): 331–33. Bibcode:1987Натура.329..331F. Дои:10.1038 / 329331a0. S2CID 4353395.
- ^ а б Zylberberg, L .; Meunier, F.J .; Лаурин, М. (2016). «Микроанатомическое и гистологическое исследование посткраниального дермального скелета девонского актиноптерига. Cheirolepis canadensis". Acta Palaeontologica Polonica. 61 (2): 363–376. Дои:10.4202 / app.00161.2015.
- ^ Zhang, J .; Wagh, P .; Guay, D .; Sanchez-Pulido, L .; Padhi, B.K .; Корж, В .; Андраде-Наварро, М. А .; Акименко М.А. (2010). «Потеря белков актинотрихии рыб и переход от плавников к конечностям». Природа. 466 (7303): 234–237. Bibcode:2010Натура.466..234Z. Дои:10.1038 / природа09137. PMID 20574421. S2CID 205221027.
- ^ Гамлет 1999, п. 528.
- ^ Функция гетероцеркального хвоста акул: количественная динамика следа при устойчивом горизонтальном плавании и вертикальном маневрировании - Журнал экспериментальной биологии 205, 2365–2374 (2002).
- ^ "Скелет и органы акулы". Архивировано из оригинал 5 августа 2010 г.. Получено 14 августа, 2009.
- ^ Майкл, Брайт. «Челюсти: естественная история акул». Колумбийский университет. Архивировано из оригинал на 2012-01-24. Получено 2009-08-29.
- ^ Нельсон, Джозеф С. (1994). Рыбы мира. Нью-Йорк: Джон Уайли и сыновья. ISBN 978-0-471-54713-6. OCLC 28965588.
- ^ а б c Сфакиотакис, М; Лейн, DM; Дэвис, JBC (1999). «Обзор способов плавания рыб для водного передвижения» (PDF). Журнал IEEE по океанической инженерии. 24 (2): 237–252. Bibcode:1999IJOE ... 24..237S. CiteSeerX 10.1.1.459.8614. Дои:10.1109/48.757275. Архивировано из оригинал (PDF) на 24.12.2013.
- ^ Франк, Жан-Пьер и Мишель, Жан-Мари (2004) Основы кавитации Springer. ISBN 9781402022326.
- ^ а б Брахич, Екатерина (2008-03-28). «Дельфины плавают так быстро, что больно». Новый ученый. Получено 2008-03-31.
- ^ Nauen, JC; Лаудер, GV (2001a). «Передвижение скумбридов: визуализация обтекания хвостового стебля и плавников скумбрии голавля» Scomber japonicus". Журнал экспериментальной биологии. 204 (Pt 13): 2251–63. PMID 11507109.
- ^ Nauen, JC; Лаудер, GV (2001b). «Трехмерный анализ кинематики плавников скумбрии голавля». (Scomber japonicus)". Биологический бюллетень. 200 (1): 9–19. Дои:10.2307/1543081. JSTOR 1543081. PMID 11249216. S2CID 28910289.
- ^ Nauen, JC; Лаудер, GV (2000). «Передвижение у чешуекрылых: морфология и кинематика плавников скумбрии голавля». Scomber japonicus" (PDF). Журнал экспериментальной биологии. 203 (Pt 15): 2247–59. PMID 10887065.
- ^ Flammang, BE; Лаудер, Г.В. Troolin, DR; Strand, TE (2011). «Объемное изображение движения рыб». Письма о биологии. 7 (5): 695–698. Дои:10.1098 / рсбл.2011.0282. ЧВК 3169073. PMID 21508026.
- ^ Рыба, ИП; Лаудер, GV (2006). «Пассивное и активное управление потоком плавающих рыб и млекопитающих». Ежегодный обзор гидромеханики. 38 (1): 193–224. Bibcode:2006АнРФМ..38..193Ф. Дои:10.1146 / annurev.fluid.38.050304.092201. S2CID 4983205.
- ^ Магнусон Дж. Дж. (1978) «Передвижение чешуйчатых рыб: гидромеханика, морфология и поведение» в Физиология рыб, Том 7: Locomotion, WS Hoar и DJ Randall (Eds) Academic Press. Стр. 240–308. ISBN 9780123504074.
- ^ Движение судов в море В архиве 25 ноября 2011 г. Wayback Machine Проверено 22 ноября 2012 года.
- ^ Рана и Джоаг (2001) Классическая механика Страница 391, Тата МакГроу-Хилл Образование. ISBN 9780074603154.
- ^ а б c Алевизон WS (1994) «Путеводитель Рыб по экологии Карибских рифов» Издательская компания "Галф" ISBN 1-55992-077-7
- ^ Лингхэм-Солиар, Т. (2005). "Спинной плавник белой акулы, Carcharodon carcharias: динамический стабилизатор для быстрого плавания". Журнал морфологии. 263 (1): 1–11. Дои:10.1002 / jmor.10207. PMID 15536651. S2CID 827610.
- ^ а б Ихтиология Флоридский музей естественной истории. Проверено 22 ноября 2012 года.
- ^ Мастерсон, Дж. "Gambusia affinis". Смитсоновский институт. Получено 21 октября 2011.
- ^ Кунц, Альберт (1913). "Заметки о привычках, морфологии репродуктивных органов и эмбриологии живородящих рыб Gambusia affinis". Бюллетень Управления рыболовства США. 33: 181–190.
- ^ Капур Б.Г. и Кханна Б. (2004) Справочник по ихтиологии С. 497–498, Springer Science & Business Media. ISBN 9783540428541.
- ^ Хелфман Джи, Коллетт БиБи, Фэйси Д.Х. и Боуэн Б.В. (2009) Разнообразие рыб: биология, эволюция и экология п. 35, Wiley-Blackwell. ISBN 978-1-4051-2494-2.
- ^ «Системный глоссарий». FishBase. Получено 2013-02-15.
- ^ Heinicke, Matthew P .; Naylor, Gavin J. P .; Хеджес, С. Блэр (2009). Древо жизни: хрящевые рыбы (Chondrichthyes). Издательство Оксфордского университета. п. 320. ISBN 978-0191560156.
- ^ а б Водная жизнь мира С. 332–333, Marshall Cavendish Corporation, 2000. ISBN 9780761471707.
- ^ Демент Дж В центре внимания видов: атлантический парусник (Istiophorus albicans) В архиве 17 декабря 2010 г. Wayback Machine littoralsociety.org. Проверено 1 апреля 2012 года.
- ^ Бертельсен Э. и Питч Т.В. (1998). Энциклопедия рыб. Сан-Диего: Academic Press. С. 138–139. ISBN 978-0-12-547665-2.
- ^ Фиолетовый летающий гурнард, Дактилоптена восточная (Кювье, 1829 г.) Австралийский музей. Обновлено: 15 сентября 2012 г. Дата обращения: 2 ноября 2012 г.
- ^ Froese, Rainer and Pauly, Daniel, eds. (2012). "Дактилоптена восточная" в FishBase. Версия от ноября 2012 г.
- ^ Самки рыбок щеголяют плавниками, чтобы привлечь помощника ScienceDaily. 8 октября 2010 г.
- ^ Baldauf, SA; Баккер, ТКМ; Гердер, Ф; Kullmann, H; Тюнкен, Т. (2010). "Выбор самца весы женского орнамента аллометрия у рыбы-цихлиды". BMC Эволюционная биология. 10: 301. Дои:10.1186/1471-2148-10-301. ЧВК 2958921. PMID 20932273.
- ^ Шульц, Кен (2011) Полевой справочник Кена Шульца по морским рыбам Стр. 250, John Wiley & Sons. ISBN 9781118039885.
- ^ Ваннучини С (1999). «Утилизация акул, маркетинг и торговля». Технический документ ФАО по рыболовству. 389.
- ^ Гудрич, Эдвин С. 1906. «Мемуары: заметки о развитии, строении и происхождении срединных и парных плавников рыб». Журнал клеточной науки s2-50 (198): 333–76.
- ^ Бренд, Ричард А. (2008). «Происхождение и сравнительная анатомия грудной конечности». Клиническая ортопедия и смежные исследования. 466 (3): 531–42. Дои:10.1007 / s11999-007-0102-6. ЧВК 2505211. PMID 18264841.
- ^ а б c Коутс, М. И. (2003). «Эволюция парных ласт». Теория в биологических науках. 122 (2–3): 266–87. Дои:10.1078/1431-7613-00087.
- ^ Гегенбаур К., Ф. Дж. Белл и Э. Рэй Ланкестер. 1878 г. Элементы сравнительной анатомии. Карл Гегенбаур ... Тр. Ф. Джеффри Белл ... Перевод Rev. и предисловие, написанные Э. Рэем Ланкестером ... Лондон: Macmillan and Co.,.
- ^ Гудрич, Эдвин С. 1906. «Мемуары: заметки о развитии, структуре и происхождении срединных и парных плавников рыб». Журнал клеточной науки s2-50 (198): 333–76.
- ^ Бренд, Ричард А. (2008). «Происхождение и сравнительная анатомия грудной конечности». Клиническая ортопедия и смежные исследования. 466 (3): 531–42. Дои:10.1007 / s11999-007-0102-6. ЧВК 2505211. PMID 18264841.
- ^ а б Бегеманн, Геррит (2009). «Эволюционная биология развития». Данио. 6 (3): 303–4. Дои:10.1089 / zeb.2009.0593.
- ^ Коул, Николас Дж .; Карри, Питер Д. (2007). «Взгляд акул: эволюционные и эволюционные модели развития плавников». Динамика развития. 236 (9): 2421–31. Дои:10.1002 / dvdy.21268. PMID 17676641. S2CID 40763215.
- ^ Фрейтас, Рената; Чжан, Гуанцзюнь; Кон, Мартин Дж. (2006). «Доказательства того, что механизмы развития плавников развивались в средней линии ранних позвоночных». Природа. 442 (7106): 1033–37. Bibcode:2006 Натур.442.1033F. Дои:10.1038 / природа04984. PMID 16878142. S2CID 4322878.
- ^ Gillis, J. A .; Dahn, R.D .; Шубин, Н. Х. (2009). «Общие механизмы развития формируют структуру жаберной дуги позвоночных и парных скелетов плавников». Труды Национальной академии наук. 106 (14): 5720–24. Bibcode:2009PNAS..106.5720G. Дои:10.1073 / pnas.0810959106. ЧВК 2667079. PMID 19321424.
- ^ "У первобытной рыбы рудиментарные пальцы" ScienceDaily, 23 сентября 2008 г.
- ^ Лаурин, М. (2010). Как позвоночные животные вышли из воды. Беркли, Калифорния, США: Калифорнийский университет Press. ISBN 978-0-520-26647-6.
- ^ Холл, Брайан К. (2007) Плавники в конечности: эволюция, развитие и трансформация Издательство Чикагского университета. ISBN 9780226313375.
- ^ Шубин, Нил (2009) Ваша внутренняя рыба: путешествие в 3,5 миллиарда лет истории человеческого тела Винтажные книги. ISBN 9780307277459. UCTV интервью
- ^ Клак, Дженнифер А (2012) «От плавников до ног» Глава 6, страницы 187–260, в: Gaining Ground, второе издание: происхождение и эволюция четвероногих, Издательство Индианского университета. ISBN 9780253356758.
- ^ Мур, Джон А (1988). "[www.sicb.org/dl/saawok/449.pdf« Понимание природы - форма и функция »] стр. 485». Американский зоолог. 28 (2): 449–584. Дои:10.1093 / icb / 28.2.449.
- ^ Двоякодышащая рыба дает представление о жизни на суше: «Люди - это всего лишь модифицированные рыбы» ScienceDaily, 7 октября 2011 г.
- ^ Коул, штат Нью-Джерси; Холл, TE; Дон, ЭК; Бергер, S; Бойсверт, Калифорния; и другие. (2011). «Развитие и эволюция мышц тазового плавника». PLOS Биология. 9 (10): e1001168. Дои:10.1371 / journal.pbio.1001168. ЧВК 3186808. PMID 21990962.
- ^ Маленький шаг для двоякодышащих рыб, большой шаг в эволюции ходьбы " ScienceDaily, 13 декабря 2011 г.
- ^ King, HM; Шубин Н.Х .; Коутс, Мичиган; Хейл, Мэн (2011). «Поведенческие свидетельства эволюции ходьбы и прыжков до появления на Земле у саркоптерийских рыб». Труды Национальной академии наук. 108 (52): 21146–21151. Bibcode:2011PNAS..10821146K. Дои:10.1073 / pnas.1118669109. ЧВК 3248479. PMID 22160688.
- ^ Шубин, Н; Табин, С; Кэрролл, S (1997). «Ископаемые останки, гены и эволюция конечностей животных» (PDF). Природа. 388 (6643): 639–648. Bibcode:1997Натура.388..639S. Дои:10.1038/41710. PMID 9262397. S2CID 2913898. Архивировано из оригинал (PDF) на 2012-09-16.
- ^ Полет позвоночных: три решения Калифорнийский университет. Обновлено 29 сентября 2005 г.
- ^ «Ученые обнаружили недостающее звено между дельфином, китом и его ближайшим родственником, бегемотом». Новости науки Daily. 2005-01-25. Архивировано из оригинал на 2007-03-04. Получено 2007-06-18.
- ^ Гейтси, Дж. (1 мая 1997 г.). «Больше ДНК для клады Cetacea / Hippopotamidae: ген белка свертывания крови гамма-фибриноген». Молекулярная биология и эволюция. 14 (5): 537–543. Дои:10.1093 / oxfordjournals.molbev.a025790. PMID 9159931.
- ^ Флинн JJ, Finarelli JA, Zehr S, Hsu J, Nedbal MA (2005). «Молекулярная филогения плотоядных (млекопитающих): оценка влияния увеличения выборки на разрешение загадочных отношений». Систематическая биология. 54 (2): 317–337. Дои:10.1080/10635150590923326. PMID 16012099.
- ^ Войлок WJL «Некоторые функциональные и структурные характеристики ласт и сосальщиков китообразных» Страницы 255–275 в: Норрис К.С. (ред.) Киты, дельфины и морские свиньи, Калифорнийский университет Press.
- ^ Эволюция китов Музей Калифорнийского университета. Проверено 27 ноября 2012 года.
- ^ Тевиссен, JGM; Купер, LN; Джордж, JC; Баджпай, S (2009). «От суши к воде: происхождение китов, дельфинов и морских свиней» (PDF). Evo Edu Outreach. 2 (2): 272–288. Дои:10.1007 / s12052-009-0135-2. S2CID 11583496.
- ^ Мартилль Д.М. (1993). «Супи-субстраты: среда для исключительной сохранности ихтиозавров из сланцев Посидония (нижняя юра) Германии». Каупия - Darmstädter Beiträge zur Naturgeschichte, 2 : 77-97.
- ^ Гулд, Стивен Джей (1993) "Изогнутый вне формы" в Восемь поросят: размышления в естествознании. Нортон, 179–94. ISBN 9780393311396.
- ^ «Чарли: Роботизированная рыба ЦРУ - Центральное разведывательное управление». www.cia.gov. Получено 12 декабря 2016.
- ^ Ричард Мейсон. "Каков рынок рыб-роботов?". Архивировано из оригинал на 2009-07-04.
- ^ Витун Джуварахавонг. «Робот-рыба». Институт полевой робототехники. Архивировано из оригинал на 2007-11-04. Получено 2007-10-25.
- ^ "Роботизированная рыба на базе Gumstix PC и PIC". Группа робототехники, ориентированной на человека в Университете Эссекса. Получено 2007-10-25.
- ^ "Роботизированные рыбки дебютируют в аквариумах". cnn.com. CNN. 10 октября 2005 г.. Получено 12 июн 2011.
- ^ Уолш, Доминик (3 мая 2008 г.). "Merlin Entertainments пополнила список достопримечательностей Лондона покупкой аквариума". thetimes.co.uk. Таймс оф Лондон. Получено 12 июн 2011.
- ^ Для Festo природа указывает путь Техника управления, 18 мая 2009 г.
- ^ Бионические пингвины летают сквозь воду ... и воздух Гизмаг, 27 апреля 2009 г.
- ^ Робот Festo AquaRay Техновелгия, 20 апреля 2009 г.
- ^ Робот-медуза AquaJelly от Festo Инженерное телевидение, 12 июля 2012 г.
- ^ Легкие роботы: летающий цирк Festo Инженер, 18 июля 2011 г.
- ^ Огромный герр, Д. Роберт Дж. (Октябрь 2004 г.). «Плавательный робот, приводимый в действие живой мышечной тканью». Журнал нейроинжиниринга и реабилитации. 1 (1): 6. Дои:10.1186/1743-0003-1-6. ЧВК 544953. PMID 15679914.
- ^ Как работает биомехатроника Как это работает/ Проверено 22 ноября 2012 г.
- ^ Лаудер, Г. В. (2011). «Гидродинамика плавания: десять вопросов и технические подходы, необходимые для их решения» (PDF). Эксперименты с жидкостями. 51 (1): 23–35. Bibcode:2011ExFl ... 51 ... 23L. Дои:10.1007 / s00348-009-0765-8. S2CID 890431.
Список используемой литературы
- Гамлетт, Уильям К. (1999). Акулы, коньки и скаты: биология пластиножаберных рыб (1-е изд.). стр. 56: Издательство Университета Джона Хопкинса. ISBN 978-0-8018-6048-5.CS1 maint: location (ссылка на сайт)
дальнейшее чтение
- Холл, Брайан К. (2007) Плавники в конечности: эволюция, развитие и трансформация Издательство Чикагского университета. ISBN 9780226313375.
- Helfman G, Collette BB, Facey DE и Bowen BW (2009) «Функциональная морфология передвижения и питания» Глава 8, стр. 101–116. В:Разнообразие рыб: биология, Джон Уайли и сыновья. ISBN 9781444311907.
- Лаудер Г.В.; Nauen, JC; Друкер, EG (2002). "Экспериментальная гидродинамика и эволюция: функция срединных плавников у лучеоперых рыб". Интегр. Комп. Биол. 42 (5): 1009–1017. Дои:10.1093 / icb / 42.5.1009. PMID 21680382.
- Лаудер, Г.В. Друкер, EG (2004). «Морфология и экспериментальная гидродинамика рулевых поверхностей плавников рыб» (PDF). Журнал океанической инженерии. 29 (3): 556–571. Bibcode:2004IJOE ... 29..556L. Дои:10.1109 / joe.2004.833219. S2CID 36207755.
внешние ссылки
- Гомология лепидотрихии плавников у остеихтиновых рыб
- Рыбий плавник Сеть Earthlife
- Могут ли рыбы-роботы обнаруживать загрязнения? Как это работает. По состоянию на 30 января 2012 г.
| Плавники |  | |
|---|---|---|
| Конечности | ||
| Крылья | ||
| Эволюция | ||
| Связанный | ||
| Около рыбы |  | ||||
|---|---|---|---|---|---|
| Анатомия и физиология | |||||
| Сенсорный системы | |||||
| Размножение | |||||
| Передвижение | |||||
| Другой поведение | |||||
| От место обитания | |||||
| Другие типы | |||||
| Коммерческий |
| ||||
| Основные группы | |||||
| Списки | |||||
| |||||