Декартова система координат - Cartesian coordinate system
Эта статья нужны дополнительные цитаты для проверка. (Июнь 2012 г.) (Узнайте, как и когда удалить этот шаблон сообщения) |

А Декартова система координат (Великобритания: /kɑːˈтяzjəп/, нас: /kɑːrˈтяʒəп/) это система координат который определяет каждый точка уникально в самолет набором числовой координаты, которые являются подписанный расстояния до точки от двух фиксированных перпендикуляр ориентированные линии, измеренные одинаковыми единица длины. Каждая контрольная линия называется ось координат или просто ось (множественное число топоры) системы, а точка их встречи - это ее источник, при заказанной паре (0, 0). Координаты также могут быть определены как положения перпендикулярные выступы точки на две оси, выраженные как расстояния со знаком от начала координат.
По тому же принципу можно указать положение любой точки в трехмерное пространство тремя декартовыми координатами, его знаковыми расстояниями до трех взаимно перпендикулярных плоскостей (или, что то же самое, его перпендикулярной проекцией на три взаимно перпендикулярные линии). В целом, п Декартовы координаты (элемент настоящий п-Космос ) укажите точку в п-размерный Евклидово пространство для любого измерение п. Эти координаты равны, с точностью до знак, на расстояния от точки до п взаимно перпендикулярный гиперплоскости.
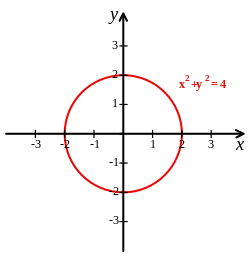
Изобретение декартовых координат в 17 веке Рене Декарт (Латинизированный имя: Картезий) произвела революцию в математике, предоставив первую систематическую связь между Евклидова геометрия и алгебра. Используя декартову систему координат, геометрические фигуры (например, кривые ) можно описать как Декартовы уравнения: алгебраический уравнения с координатами точек, лежащих на фигуре. Например, окружность радиуса 2 с центром в начале плоскости может быть описана как совокупность всех точек, координаты которых Икс и y удовлетворяют уравнению Икс2 + y2 = 4.
Декартовы координаты являются основой аналитическая геометрия, и обеспечивают поучительные геометрические интерпретации для многих других разделов математики, таких как линейная алгебра, комплексный анализ, дифференциальная геометрия, многомерный исчисление, теория групп и больше. Знакомый пример - концепция график функции. Декартовы координаты также являются важными инструментами для большинства прикладных дисциплин, связанных с геометрией, включая астрономия, физика, инженерное дело и многое другое. Это наиболее распространенная система координат, используемая в компьютерная графика, компьютерный геометрический дизайн и другие обработка данных, связанных с геометрией.
История
Прилагательное Декартово относится к французскому математик и философ Рене Декарт, который опубликовал эту идею в 1637 году. Пьер де Ферма, который также работал в трех измерениях, хотя Ферма не опубликовал открытие.[1] Французский священнослужитель Николь Орем использовали конструкции, подобные декартовым координатам, задолго до времен Декарта и Ферма.[2]
И Декарт, и Ферма использовали одну ось в своих трактах и имеют переменную длину, измеренную относительно этой оси. Концепция использования пары осей была введена позже, после того, как Декарт La Géométrie был переведен на латынь в 1649 г. Франс ван Скутен и его ученики. Эти комментаторы представили несколько концепций, пытаясь прояснить идеи, содержащиеся в работе Декарта.[3]
Развитие декартовой системы координат сыграло бы фундаментальную роль в развитии исчисление к Исаак Ньютон и Готфрид Вильгельм Лейбниц.[4] Позднее двухкоординатное описание плоскости было обобщено в понятие векторные пространства.[5]
Многие другие системы координат были разработаны со времен Декарта, такие как полярные координаты для самолета, а сферический и цилиндрические координаты для трехмерного пространства.
Описание
Одно измерение
Выбор декартовой системы координат для одномерного пространства, то есть прямой линии, включает выбор точки О линии (начало координат), единицу длины и ориентацию линии. Ориентация выбирает, какая из двух полуосей определяется О положительный и отрицательный; тогда мы говорим, что линия «ориентирована» (или «указывает») от отрицательной половины к положительной половине. Тогда каждая точка п линии можно определить по ее удаленности от О, взятые со знаком + или - в зависимости от того, в какой половине строки содержится п.
Линия с выбранной декартовой системой называется прямой. числовая строка. Каждое действительное число имеет уникальное расположение на линии. И наоборот, каждую точку на линии можно интерпретировать как номер в упорядоченном континууме, таком как действительные числа.
Два измерения
Декартова система координат в двух измерениях (также называемая прямоугольная система координат или ортогональная система координат[6]) определяется упорядоченная пара из перпендикуляр линии (оси), одиночные единица длины для обеих осей и ориентацию для каждой оси. Точка пересечения осей берется за начало координат для обоих, превращая каждую ось в числовую линию. Для любой точки п, линия проводится через п перпендикулярно каждой оси, а положение, в котором он встречается с осью, интерпретируется как число. Два числа в выбранном порядке - это Декартовы координаты из п. Обратная конструкция позволяет определить точку п учитывая его координаты.
Первая и вторая координаты называются абсцисса и ордината из п, соответственно; а точка пересечения осей называется источник системы координат. Координаты обычно записываются в виде двух чисел в скобках в указанном порядке, разделенных запятой, как в (3, −10.5). Таким образом, начало координат имеет координаты (0, 0), а точки на положительных полуосях на расстоянии одной единицы от начала координат имеют координаты (1, 0) и (0, 1).
В математике, физике и технике первая ось обычно определяется или изображается как горизонтальная и ориентирована вправо, а вторая ось - вертикальная и ориентирована вверх. (Однако в некоторых компьютерная графика контекстах ось ординат может быть направлена вниз.) Начало координат часто обозначается О, а две координаты часто обозначают буквами Икс и Y, или же Икс и y. В этом случае оси можно назвать Иксось и Y-ось. Выбор букв происходит из первоначального соглашения, согласно которому последняя часть алфавита используется для обозначения неизвестных значений. Первая часть алфавита использовалась для обозначения известных значений.
А Евклидова плоскость с выбранной декартовой системой координат называется Декартова плоскость. В декартовой плоскости можно определить канонических представителей определенных геометрических фигур, таких как единичный круг (с радиусом, равным единице длины, и центром в начале координат), единичный квадрат (диагональ которой имеет концы в (0, 0) и (1, 1)), гипербола единиц, и так далее.
Две оси делят плоскость на четыре прямые углы, называется квадранты. Квадранты могут быть названы или пронумерованы по-разному, но квадрант, в котором все координаты положительны, обычно называется квадрантом. первый квадрант.
Если координаты точки равны (Икс, y), то его расстояния от Икс-оси и от Y-оси |y| и |Икс| соответственно; где | ... | обозначает абсолютная величина числа.
Три измерения
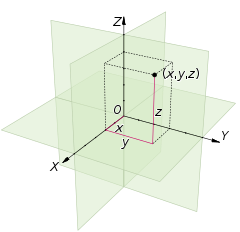
Декартова система координат для трехмерного пространства состоит из упорядоченной тройки прямых ( топоры), которые проходят через общую точку ( источник), и попарно перпендикулярны; ориентация для каждой оси; и единицу длины для всех трех осей. Как и в двумерном случае, каждая ось становится числовой линией. Для любой точки п пространства, гиперплоскость рассматривается через п перпендикулярно каждой координатной оси, и интерпретирует точку, в которой эта гиперплоскость пересекает ось, как число. Декартовы координаты п - эти три числа в выбранном порядке. Обратная конструкция определяет точку п учитывая его три координаты.
В качестве альтернативы каждая координата точки п можно принять как расстояние от п к гиперплоскости, определяемой двумя другими осями, причем знак определяется ориентацией соответствующей оси.
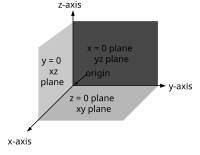
Каждая пара осей определяет координатная гиперплоскость. Эти гиперплоскости делят пространство на восемь частей. трехгранник, называется октанты.
Октанты: | (+ x, + y, + z) | (-x, + y, + z) | (+ x, + y, -z) | (-x, + y, -z) | (+ x, -y, + z) | (-x, -y, + z) | (+ x, -y, -z) | (-x, -y, -z) |
Координаты обычно записываются в виде трех чисел (или алгебраических формул), заключенных в круглые скобки и разделенных запятыми, как в (3, −2.5, 1) или же (т, ты + v, π / 2). Таким образом, начало координат имеет координаты (0, 0, 0), а единичные точки на трех осях равны (1, 0, 0), (0, 1, 0), и (0, 0, 1).
Стандартных названий координат по трем осям нет (однако термины абсцисса, ордината и прикладывать иногда используются). Координаты часто обозначают буквами Икс, Y, и Z, или же Икс, y, и z. Тогда оси могут называться Икс-ось, Y-ось и Z-оси соответственно. Тогда координатные гиперплоскости можно назвать XY-самолет, YZ-самолет и XZ-самолет.
В математике, физике и инженерии первые две оси часто определяются или изображаются как горизонтальные, а третья ось направлена вверх. В этом случае третью координату можно назвать высота или же высота. Ориентация обычно выбирается так, чтобы угол 90 градусов от первой оси ко второй оси смотрел против часовой стрелки, если смотреть из точки. (0, 0, 1); соглашение, которое обычно называют то правило правой руки.

Высшие измерения
Поскольку декартовы координаты уникальны и неоднозначны, точки декартовой плоскости можно отождествить с парами действительные числа; это с Декартово произведение , куда набор всех действительных чисел. Таким же образом точки в любом Евклидово пространство измерения п отождествляться с кортежи (списки) из п действительные числа, то есть с декартовым произведением .



Обобщения
Концепция декартовых координат обобщается, чтобы позволить оси, которые не перпендикулярны друг другу, и / или разные единицы вдоль каждой оси. В этом случае каждая координата получается путем проецирования точки на одну ось в направлении, параллельном другой оси (или, в общем, гиперплоскость определяется всеми другими осями). В таком наклонная система координат вычисления расстояний и углов должны быть изменены по сравнению с вычислениями в стандартных декартовых системах, и многие стандартные формулы (такие как формула Пифагора для расстояния) не выполняются (см. аффинная плоскость ).
Обозначения и соглашения
Декартовы координаты точки обычно записываются в скобки и через запятую, как в (10, 5) или же (3, 5, 7). Место происхождения часто обозначается заглавной буквой. О. В аналитической геометрии неизвестные или общие координаты часто обозначаются буквами (Икс, y) в плоскости и (Икс, y, z) в трехмерном пространстве. Этот обычай исходит из соглашения об алгебре, которое использует буквы в конце алфавита для неизвестных значений (таких как координаты точек во многих геометрических задачах) и буквы в начале для заданных величин.
Эти общепринятые имена часто используются в других областях, таких как физика и техника, хотя могут использоваться и другие буквы. Например, на графике, показывающем, как давление варьируется в зависимости от время, координаты графика можно обозначить п и т. Каждая ось обычно называется в честь координаты, которая измеряется вдоль нее; так говорят ось абсцисс, то ось Y, то Таксис, так далее.
Другое распространенное соглашение для именования координат - использование индексов, например (Икс1, Икс2, ..., Иксп) для п координаты в п-мерное пространство, особенно когда п больше 3 или не указано. Некоторые авторы предпочитают нумерацию (Икс0, Икс1, ..., Иксп−1). Эти обозначения особенно удобны в компьютерное программирование: сохраняя координаты точки как множество, вместо записывать, то нижний индекс может служить для индексации координат.
В математических иллюстрациях двумерных декартовых систем первая координата (традиционно называемая абсцисса ) измеряется по горизонтальный ось, ориентированная слева направо. Вторая координата ( ордината ) затем измеряется по вертикальный ось, обычно ориентированная снизу вверх. Маленькие дети, изучающие декартову систему, обычно учат порядок чтения значений, прежде чем закрепить Икс-, y-, и zконцепции осей, начиная с двумерной мнемоники (например, «Пройдите по коридору, затем поднимитесь по лестнице», как прямо через Иксось затем вертикально вверх по y-ось).[7]
Компьютерная графика и обработка изображений, однако часто используют систему координат с y- ось направлена вниз на дисплее компьютера. Это соглашение разработано в 1960-х годах (или ранее) из того, как изображения изначально хранились в отображать буферы.
Для трехмерных систем принято изобразить ху-плоскость по горизонтали, с z-ось добавлена для представления высоты (положительное значение вверх). Кроме того, существует соглашение об ориентации Икс- ось к зрителю со смещением вправо или влево. Если диаграмма (3D проекция или же 2D чертеж в перспективе ) показывает Икс- и y-оси по горизонтали и вертикали соответственно, то z- ось должна быть указана «за пределы страницы» в сторону зрителя или камеры. На такой двумерной диаграмме трехмерной системы координат z- ось будет выглядеть как линия или луч, указывающий вниз и влево или вниз и вправо, в зависимости от предполагаемого зрителя или камеры перспектива. На любой диаграмме или отображении ориентация трех осей в целом произвольна. Однако ориентация осей относительно друг друга всегда должна соответствовать правило правой руки, если специально не указано иное. Все законы физики и математики предполагают это праворукость, что обеспечивает согласованность.
Для трехмерных диаграмм имена «абсцисса» и «ордината» редко используются для Икс и y, соответственно. Когда они есть, z-координату иногда называют прикладывать. Слова абсцисса, ордината и прикладывать иногда используются для обозначения осей координат, а не значений координат.[6]
Квадранты и октанты
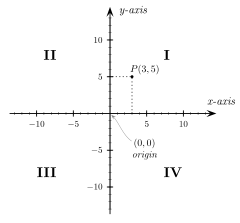
Оси двумерной декартовой системы делят плоскость на четыре бесконечные области, называемые квадранты,[6] каждая ограничена двумя полуосями. Они часто нумеруются с 1-го по 4-й и обозначаются римские цифры: I (где знаки двух координат - I (+, +), II (-, +), III (-, -) и IV (+, -). Когда оси нарисованы в соответствии с математическим обычаем , нумерация идет против часовой стрелки начиная с правого верхнего («северо-восточного») квадранта.
Точно так же трехмерная декартова система определяет разделение пространства на восемь областей или октанты,[6] по знакам координат точек. Соглашение, используемое для наименования определенного октанта, состоит в перечислении его знаков, например (+ + +) или же (− + −). Обобщением квадранта и октанта до произвольного числа измерений является ортодоксальный, и применяется аналогичная система именования.
Декартовы формулы для плоскости
Расстояние между двумя точками
В Евклидово расстояние между двумя точками плоскости с декартовыми координатами и является



Это декартова версия Теорема Пифагора. В трехмерном пространстве расстояние между точками и является



которое может быть получено двумя последовательными применениями теоремы Пифагора.[8]
Евклидовы преобразования
В Евклидовы преобразования или же Евклидовы движения являются (биективный ) отображения точек Евклидова плоскость себе, которые сохраняют расстояния между точками. Есть четыре типа этих отображений (также называемых изометриями): переводы, вращения, размышления и скользящие отражения.[9]
Перевод
Идет перевод набор точек плоскости, сохраняющий расстояния и направления между ними, эквивалентен добавлению фиксированной пары чисел (а, б) в декартовы координаты каждой точки в наборе. То есть, если исходные координаты точки (Икс, y), после перевода они будут

Вращение
К вращать фигура против часовой стрелки вокруг начала координат под некоторым углом эквивалентно замене каждой точки координатами (Икс,y) точкой с координатами (Икс',y '), куда



Таким образом:

Отражение
Если (Икс, y) - декартовы координаты точки, тогда (−Икс, y) координаты его отражение поперек второй координатной оси (оси Y), как если бы эта линия была зеркалом. Так же, (Икс, −y) - координаты его отражения относительно первой координатной оси (оси x). В более общем смысле, отражение через линию через начало координат, образующее угол с осью x, эквивалентно замене каждой точки координатами (Икс, y) по точке с координатами (Икс′,y′), куда


Таким образом:

Скользящее отражение
Скользящее отражение - это композиция отражения, пересекающего линию, с последующим перемещением в направлении этой линии. Видно, что порядок этих операций не имеет значения (сначала может идти перевод, а затем отражение).
Общая матричная форма преобразований
Эти Евклидовы преобразования плоскости можно описать единообразно с помощью матриц. Результат применения евклидова преобразования к точке дается формулой



куда А является 2 × 2 ортогональным матрица и б = (б1, б2) - произвольная упорядоченная пара чисел;[10] то есть,


куда
- [Векторы-строки используются для координат точки, а матрица написана справа.]

Быть ортогональный, матрица А должны быть ортогональный строки с одинаковой евклидовой длиной, равной единице, то есть

и

Это эквивалентно тому, что А раз его транспонировать должен быть единичная матрица. Если эти условия не выполняются, формула описывает более общий аффинное преобразование самолета при условии, что детерминант из А не равно нулю.
Формула определяет перевод если и только если А это единичная матрица. Преобразование - это вращение вокруг некоторой точки тогда и только тогда, когда А это матрица вращения, означающий, что

Отражение или скользящее отражение получается, когда,

Предполагая, что перевод не используется, преобразования можно комбинировать, просто перемножая соответствующие матрицы преобразования.
Аффинное преобразование
Другой способ представления преобразований координат в декартовых координатах - через аффинные преобразования. При аффинных преобразованиях добавляется дополнительное измерение, и всем точкам присваивается значение 1 для этого дополнительного измерения. Преимущество этого заключается в том, что переводы точек могут быть указаны в последнем столбце матрицы. А. Таким образом, все евклидовы преобразования становятся доступными для операций матричного умножения на точки. Аффинное преобразование задается следующим образом:
- [Обратите внимание на матрицу А сверху был переставлен. Матрица находится слева, и используются векторы-столбцы для координат точек.]

Используя аффинные преобразования, можно объединить несколько различных евклидовых преобразований, включая перевод, простым умножением соответствующих матриц.
Масштабирование
Пример аффинного преобразования, которое не является евклидовым движением, дается масштабированием. Увеличение или уменьшение фигуры эквивалентно умножению декартовых координат каждой точки на одно и то же положительное число. м. Если (Икс, y) - координаты точки на исходной фигуре, соответствующая точка на масштабированной фигуре имеет координаты

Если м больше 1, цифра становится больше; если м находится между 0 и 1, он становится меньше.
Стрижка
А трансформация сдвига сдвинет верхнюю часть квадрата в сторону, чтобы образовался параллелограмм. Горизонтальный сдвиг определяется:

Стрижка может применяться и вертикально:

Ориентация и руки
В двух измерениях

Установка или выбор Иксось определяет y- ось до направления. А именно yось обязательно перпендикуляр к Икс-ось проходит через точку, отмеченную 0 на Икс-ось. Но есть выбор, какую из двух половинных линий на перпендикуляре обозначить как положительную, а какую как отрицательную. Каждый из этих двух вариантов определяет различную ориентацию (также называемую руки) декартовой плоскости.
Обычный способ ориентирования самолета с положительным Икс- ось направлена вправо и положительно yось направлена вверх (и Икс- ось «первая», а y- ось "вторая" ось), считается положительный или же стандарт ориентация, также называемая правша ориентация.
Обычно используется мнемоника для определения положительной ориентации: правило правой руки. Положите на самолет несколько сомкнутую правую руку большим пальцем вверх, пальцы направлены от Икс- ось к y-ось в положительно ориентированной системе координат.
Другой способ ориентировать самолет - следовать правило левой руки, положив левую руку на самолет большим пальцем вверх.
Когда большой палец направлен от начала координат вдоль оси к положительному положению, кривизна пальцев указывает на положительное вращение вдоль этой оси.
Независимо от правила, используемого для ориентации плоскости, вращение системы координат сохранит ориентацию. Переключение любых двух осей изменит ориентацию на обратную, но переключение обеих оставит ориентацию неизменной.
В трех измерениях

Однажды Икс- и y-оси указаны, они определяют линия вдоль которого z- ось должна лежать, но для этой линии есть два возможных направления. Возникающие в результате две возможные системы координат называются «правая» и «левая». Стандартная ориентация, где ху-плоскость горизонтальная и zось указывает вверх (и Икс- и y-оси образуют положительно ориентированную двумерную систему координат в ху-самолет при наблюдении с над то ху-самолет) называется правша или же положительный.

Название происходит от правило правой руки. Если указательный палец правой руки направлен вперед, средний палец загнуты внутрь под прямым углом к нему, а большой палец расположенные под прямым углом к обоим, три пальца указывают на относительную ориентацию Икс-, y-, и z-оси в правша система. Большой палец указывает на Иксось, указательный палец yось и средний палец z-ось. И наоборот, если то же самое проделать левой рукой, получится система для левой руки.
На рисунке 7 изображены левая и правая системы координат. Поскольку трехмерный объект отображается на двухмерном экране, возникают искажения и неоднозначность. Ось, направленная вниз (и вправо), также должна указывать к наблюдателя, тогда как "средняя" ось предназначена для того, чтобы указывать прочь от наблюдателя. Красный кружок параллельно к горизонтали ху-плоскость и указывает вращение от Икс- ось к y-ось (в обоих случаях). Следовательно, проходит красная стрелка перед то z-ось.
Рисунок 8 - еще одна попытка изобразить правую систему координат. Опять же, возникает неоднозначность, вызванная проецированием трехмерной системы координат на плоскость. Многие наблюдатели видят на Рисунке 8 «то, что переключает» выпуклый куб и вогнутый "угол". Это соответствует двум возможным ориентациям пространства. Если смотреть на фигуру как выпуклую, это дает левую систему координат. Таким образом, «правильный» способ просмотра рисунка 8 - это представить Иксось как указывающая к наблюдатель и таким образом видит вогнутый угол.
Представление вектора в стандартном базисе
Точка в пространстве в декартовой системе координат также может быть представлена положением вектор, который можно представить как стрелку, указывающую от начала системы координат к точке.[11] Если координаты представляют собой пространственные положения (смещения), обычно вектор от начала координат до интересующей точки представляется как . В двух измерениях вектор от начала координат до точки с декартовыми координатами (x, y) может быть записан как:


куда , и находятся единичные векторы в направлении Иксось и y-оси соответственно, обычно называемые стандартная основа (в некоторых областях применения они также могут называться версоры ). Точно так же в трех измерениях вектор от начала координат до точки с декартовыми координатами можно записать как:[12]




куда - единичный вектор в направлении оси z.

Здесь нет естественный интерпретация умножения векторов для получения другого вектора, который работает во всех измерениях, однако есть способ использовать сложные числа чтобы обеспечить такое умножение. На двумерной декартовой плоскости определите точку с координатами (Икс, y) с комплексным числом z = Икс + яy. Здесь, я это мнимая единица и отождествляется с точкой с координатами (0, 1), так что, это нет единичный вектор в направлении Икс-ось. Поскольку комплексные числа можно умножать, получая другое комплексное число, эта идентификация обеспечивает средство «умножения» векторов. В трехмерном декартовом пространстве аналогичная идентификация может быть выполнена с подмножеством кватернионы.
Приложения
Декартовы координаты - это абстракция, имеющая множество возможных применений в реальном мире. Тем не менее, для наложения координат на проблемное приложение используются три конструктивных шага. 1) Необходимо выбрать единицы измерения расстояния, определяющие пространственный размер, представленный числами, используемыми в качестве координат. 2) Начало координат должно быть присвоено определенному пространственному положению или ориентиру, и 3) ориентация осей должна быть определена с использованием доступных ориентиров для всех осей, кроме одной.
Рассмотрим в качестве примера наложение трехмерных декартовых координат на все точки на Земле (то есть геопространственное трехмерное изображение). Какие единицы имеют смысл? Километры - хороший выбор, поскольку первоначальное определение километра было геопространственным - 10 000 км равнялись расстоянию от экватора до Северного полюса на поверхности. Где разместить происхождение? Основываясь на симметрии, гравитационный центр Земли предполагает естественный ориентир (который можно обнаружить с помощью спутниковых орбит). Наконец, как сориентировать оси X, Y и Z? Ось вращения Земли обеспечивает естественную ориентацию, тесно связанную с принципом «вверх-вниз», поэтому положительное значение Z может принимать направление от геоцентра к Северному полюсу. Местоположение на экваторе необходимо для определения оси X и нулевой меридиан выделяется как справочная ориентация, поэтому ось X принимает ориентацию от геоцентра до 0 градусов долготы, 0 градусов широты. Обратите внимание, что при трех измерениях и двух ориентациях перпендикулярных осей, закрепленных для X и Z, ось Y определяется первыми двумя вариантами. Чтобы подчиняться правилу правой руки, ось Y должна указывать из геоцентра на 90 градусов долготы и 0 градусов широты. Так каковы геоцентрические координаты Эмпайр-стейт-билдинг в Нью-Йорке? С долготы -73,985656 градуса, широты 40,748433 градуса и радиуса Земли 40 000 / 2π км и преобразования из сферических координат в декартовы вы можете оценить геоцентрические координаты Эмпайр-стейт-билдинг, (Икс, y, z) = (1330,53 км, –4635,75 км, 4155,46 км). GPS-навигация основана на таких геоцентрических координатах.
В инженерных проектах решающее значение имеет согласование определения координат. Нельзя предполагать, что координаты заранее определены для нового приложения, поэтому знание того, как построить систему координат там, где ее нет, необходимо для применения мышления Рене Декарта.
Хотя пространственные приложения используют одинаковые единицы по всем осям, в деловых и научных приложениях каждая ось может иметь разные меры измерения связанные с ним (например, килограммы, секунды, фунты и т. д.). Хотя четырехмерные и многомерные пространства трудно визуализировать, алгебру декартовых координат можно относительно легко расширить до четырех или более переменных, так что могут быть выполнены определенные вычисления с участием многих переменных. (Такого рода алгебраическое расширение используется для определения геометрии пространств более высокой размерности.) И наоборот, часто бывает полезно использовать геометрию декартовых координат в двух или трех измерениях для визуализации алгебраических отношений между двумя или тремя из многих не -пространственные переменные.
В график функции или же связь - это множество всех точек, удовлетворяющих этой функции или отношению. Для функции одной переменной ж, множество всех точек (Икс, y), куда y = ж(Икс) график функции ж. Для функции грамм двух переменных, множество всех точек (Икс, y, z), куда z = грамм(Икс, y) график функции грамм. Набросок графика такой функции или отношения будет состоять из всех основных частей функции или отношения, которые будут включать ее относительные экстремумы, ее вогнутость и точки перегиба, любые точки разрыва и ее конечное поведение. Все эти термины более полно определены в исчислении. Такие графики полезны в исчислении, чтобы понять природу и поведение функции или отношения.
Смотрите также
- Горизонтально и вертикально
- Диаграмма Джонса, который отображает четыре переменные, а не две
- Ортогональные координаты
- Полярная система координат
- Сферическая система координат
Рекомендации
- ^ Бикс, Роберт А .; Д'Суза, Гарри Дж. «Аналитическая геометрия». Британская энциклопедия. Получено 6 августа 2017.
- ^ Кент, Александр Дж .; Вуякович, Питер (4 октября 2017 г.). Справочник Рутледжа по картированию и картографии. Рутледж. ISBN 9781317568216.
- ^ Бертон 2011, п. 374
- ^ Экскурсия по исчислению, Дэвид Берлински
- ^ Акслер, Шелдон (2015). Линейная алгебра сделано правильно - Спрингер. Тексты для бакалавриата по математике. п. 1. Дои:10.1007/978-3-319-11080-6. ISBN 978-3-319-11079-0.
- ^ а б c d «Декартова ортогональная система координат». Энциклопедия математики. Получено 6 августа 2017.
- ^ «Диаграммы и графики: выбор правильного формата». www.mindtools.com. Получено 29 августа 2017.
- ^ Хьюз-Халлетт, Дебора; Маккаллум, Уильям Дж .; Глисон, Эндрю М. (2013). Исчисление: одно- и многомерное (6 изд.). Джон Вили. ISBN 978-0470-88861-2.
- ^ Умный 1998, Гл. 2
- ^ Браннан, Эсплен и Грей 1998, стр. 49
- ^ Браннан, Эсплен и Грей 1998, Приложение 2, стр. 377–382
- ^ Дэвид Дж. Гриффитс (1999). Введение в электродинамику. Прентис Холл. ISBN 978-0-13-805326-0.
Источники
- Браннан, Дэвид А .; Эсплен, Мэтью Ф .; Грей, Джереми Дж. (1998), Геометрия, Кембридж: Издательство Кембриджского университета, ISBN 978-0-521-59787-6
- Бертон, Дэвид М. (2011), История математики / Введение (7-е изд.), Нью-Йорк: Макгроу-Хилл, ISBN 978-0-07-338315-6
- Смарт, Джеймс Р. (1998), Современная геометрия (5-е изд.), Pacific Grove: Brooks / Cole, ISBN 978-0-534-35188-5
дальнейшее чтение
- Декарт, Рене (2001). Беседа о методе, оптике, геометрии и метеорологии. Перевод Пола Дж. Оскэмпа (отредактированная ред.). Индианаполис, штат Индиана: Hackett Publishing. ISBN 978-0-87220-567-3. OCLC 488633510.
- Корн Г.А., Корн Т.М. (1961). Математический справочник для ученых и инженеров (1-е изд.). Нью-Йорк: Макгроу-Хилл. стр.55–79. LCCN 59-14456. OCLC 19959906.
- Margenau H, Мерфи GM (1956). Математика физики и химии. Нью-Йорк: Д. ван Ностранд. LCCN 55-10911.
- Мун П., Спенсер Д.Е. (1988). «Прямоугольные координаты (x, y, z)». Справочник по теории поля, включая системы координат, дифференциальные уравнения и их решения (исправлено 2-е, 3-е изд.). Нью-Йорк: Springer-Verlag. С. 9–11 (Таблица 1.01). ISBN 978-0-387-18430-2.
- Морс ПМ, Фешбах H (1953). Методы теоретической физики, часть I. Нью-Йорк: Макгроу-Хилл. ISBN 978-0-07-043316-8. LCCN 52-11515.
- Зауэр Р., Сабо I (1967). Mathematische Hilfsmittel des Ingenieurs. Нью-Йорк: Springer Verlag. LCCN 67-25285.
внешняя ссылка
- Декартова система координат
- «Декартовы координаты». PlanetMath.
- MathWorld описание декартовых координат
- Конвертер координат - конвертирует полярные, декартовы и сферические координаты
- Координаты точки Интерактивный инструмент для изучения координат точки
- класс JavaScript с открытым исходным кодом для манипулирования декартовой системой координат 2D / 3D