Полярная система координат - Polar coordinate system

В математика, то полярная система координат это двумерный система координат в котором каждый точка на самолет определяется расстояние от ориентира и угол от опорного направления. Контрольная точка (аналогична началу координат Декартова система координат ) называется столб, а луч от полюса в опорном направлении является полярная ось. Расстояние от полюса называется радиальная координата, радиальное расстояние или просто радиус, а угол называется угловая координата, полярный угол, или же азимут.[1] Радиальную координату часто обозначают как р или же ρ, а угловую координату - на φ, θ, или же т. Углы в полярных обозначениях обычно выражаются либо градусы или же радианы (2π рад, равный 360 °).
Грегуар де Сент-Винсент и Бонавентура Кавальери независимо представил эти концепции в середине 17 века, хотя сам термин полярные координаты был приписан Грегорио Фонтана в 18 веке. Первоначальной мотивацией к введению полярной системы было изучение круговой и орбитальное движение.
Полярные координаты наиболее подходят в любом контексте, где рассматриваемое явление по своей природе привязано к направлению и длине от центральной точки на плоскости, например спирали. Плоские физические системы с телами, движущимися вокруг центральной точки, или явлениями, происходящими из центральной точки, часто проще и интуитивно моделировать с использованием полярных координат.
Полярная система координат расширяется до трех измерений двумя способами: цилиндрический и сферический системы координат.
История

Понятия угла и радиуса использовались еще древними народами первого тысячелетия. до н.э. В Греческий астроном и астролог Гиппарх (190–120 гг. До н.э.) создал таблицу аккорд функции, задающие длину хорды для каждого угла, и есть ссылки на его использование полярных координат при установлении положения звезд.[2] В На спиралях, Архимед описывает Архимедова спираль, функция, радиус которой зависит от угла. Однако греческая работа не охватывала полную систему координат.
Начиная с 8 века нашей эры астрономы разработали методы аппроксимации и расчета направления на Мекка (кибла ) - и расстояние до него - от любого места на Земле.[3] Начиная с IX века они использовали сферическая тригонометрия и картографическая проекция методы для точного определения этих количеств. Расчет по сути является преобразованием экваториальные полярные координаты Мекки (т.е. ее долгота и широта ) к его полярным координатам (т.е. его кибле и расстоянию) относительно системы, опорным меридианом которой является большой круг через данное местоположение и полюса Земли, и чья полярная ось является линией, проходящей через местоположение и его противоположная точка.[4]
Существуют различные версии введения полярных координат как части формальной системы координат. Полная история предмета описана в Гарвард профессор Джулиан Лоуэлл Кулидж с Происхождение полярных координат.[5] Грегуар де Сент-Винсент и Бонавентура Кавальери независимо ввел эти понятия в середине семнадцатого века. Сент-Винсент писал о них в частном порядке в 1625 году и опубликовал свою работу в 1647 году, а Кавальери опубликовал свою работу в 1635 году с исправленной версией, появившейся в 1653 году. Кавальери сначала использовал полярные координаты для решения проблемы, относящейся к области в пределах Архимедова спираль. Блез Паскаль впоследствии использовали полярные координаты для расчета длины параболические дуги.
В Метод флюсий (написано в 1671 году, опубликовано в 1736 году), сэр Исаак Ньютон исследовал преобразования между полярными координатами, которые он назвал «Седьмой манер; для спиралей», и девятью другими системами координат.[6] В журнале Acta Eruditorum (1691), Джейкоб Бернулли использовали систему с точкой на линии, называемую столб и полярная ось соответственно. Координаты задавались расстоянием от полюса и углом от полюса. полярная ось. Работа Бернулли распространилась на поиск радиус кривизны кривых, выраженных в этих координатах.
Фактический срок полярные координаты был приписан Грегорио Фонтана и использовался итальянскими писателями 18 века. Термин появился в английский в Джордж Пикок перевод 1816 года Лакруа с Дифференциальное и интегральное исчисление.[7][8] Алексис Клеро был первым, кто придумал полярные координаты в трех измерениях, и Леонард Эйлер был первым, кто их действительно разработал.[5]
Конвенции

Радиальную координату часто обозначают как р или же ρ, а угловую координату - на φ, θ, или же т. Угловая координата задается как φ к ISO стандарт 31-11. Однако в математической литературе угол часто обозначают θ вместо φ.
Углы в полярных обозначениях обычно выражаются либо градусы или же радианы (2π рад, равный 360 °). Градусы традиционно используются в навигация, геодезия, и многие прикладные дисциплины, а радианы чаще встречаются в математике и математике. физика.[9]
Угол φ определяется, чтобы начать с 0 ° от справочное направление, и увеличиваться для вращений в любом против часовой стрелки (против часовой стрелки) или же по часовой стрелке (cw) ориентация. Так, например, в математике, контрольное направление обычно рисуется как луч от полюса по горизонтали вправо, а полярный угол увеличивается до положительных углов при вращении против часовой стрелки, тогда как в навигации (несущий, Заголовок ) направление 0 ° направлено вертикально вверх, и угол увеличивается при вращении по часовой стрелке. Полярные углы уменьшаются в сторону отрицательных значений для вращений в противоположных направлениях.
Уникальность полярных координат
Добавление любого количества полных повороты (360 °) к угловой координате не меняет соответствующего направления. Точно так же любая полярная координата идентична координате с отрицательной радиальной составляющей и противоположным направлением (добавление 180 ° к полярному углу). Следовательно, та же точка (р, φ) можно выразить бесконечным числом различных полярных координат (р, φ + п × 360°) и (−р, φ + 180° + п × 360°) = (−р, φ + (2п + 1) × 180°), куда п произвольный целое число.[10] Более того, сам полюс можно выразить как (0,φ) под любым углом φ.[11]
Если для любой точки, кроме полюса, требуется уникальное представление, обычно ограничивают р к положительным числам (р > 0) и φ либо к интервал [0, 360°) или интервал (−180°, 180°], что в радианах (0, 2π] или же [−π, π).[12] Другое соглашение, относящееся к обычному домену функция arctan, заключается в том, чтобы учесть произвольные ненулевые действительные значения радиальной компоненты и ограничить полярный угол до (−90°, 90°]. Во всех случаях уникальный азимут полюса (р = 0) необходимо выбрать, например, φ = 0.
Преобразование между полярными и декартовыми координатами
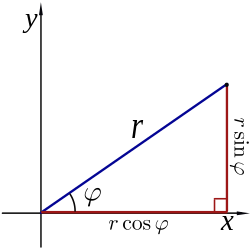


Полярные координаты р и φ можно преобразовать в Декартовы координаты Икс и у используя тригонометрические функции синус и косинус:

Декартовы координаты Икс и у можно преобразовать в полярные координаты р и φ с р ≥ 0 и φ в интервале (-π, π] к:[13]
- (как в теорема Пифагора или Евклидова норма ), и


куда atan2 это обычная вариация на арктангенс функция определяется как

Если р сначала рассчитывается, как указано выше, затем эта формула для φ можно сказать немного проще, используя стандарт арккозин функция:

Значение φ выше это основная стоимость функции комплексного числа аргумент применительно к Икс + иу. Угол в диапазоне [0, 2π) можно получить добавлением 2π к значению, если оно отрицательное (другими словами, когда у отрицательный).
Полярное уравнение кривой
Уравнение, определяющее алгебраическая кривая выраженный в полярных координатах, известен как полярное уравнение. Во многих случаях такое уравнение можно просто задать, задав р как функция из φ. Полученная кривая будет состоять из точек вида (р(φ), φ) и может рассматриваться как график полярной функции р. Обратите внимание, что, в отличие от декартовых координат, независимая переменная φ это второй вход в заказанную пару.
Различные формы симметрия можно вывести из уравнения полярной функции р. Если р(−φ) = р(φ) кривая будет симметричной относительно горизонтального луча (0 ° / 180 °), если р(π − φ) = р(φ) он будет симметричен относительно вертикального луча (90 ° / 270 °), и если р(φ - α) = р(φ) это будет осесимметричный по α по часовой стрелке и против часовой стрелки про полюс.
Из-за круговой природы полярной системы координат многие кривые могут быть описаны довольно простым полярным уравнением, тогда как их декартова форма намного сложнее. К наиболее известным из этих кривых относятся полярная роза, Архимедова спираль, лемниската, Limaçon, и кардиоидный.
Для круга, линии и полярной розы ниже подразумевается, что нет ограничений на область и диапазон кривой.
Круг
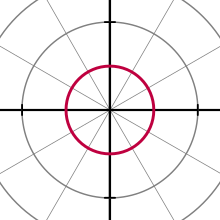
Общее уравнение для окружности с центром в точке (р0, ) и радиус а является


Это можно упростить различными способами для соответствия более конкретным случаям, таким как уравнение

для круга с центром на полюсе и радиусом а.[14]
Когда р0 = а, или когда начало координат лежит на окружности, уравнение принимает вид

В общем случае уравнение можно решить относительно р, давая

решение со знаком минус перед квадратным корнем дает ту же кривую.
Линия
Радиальный линии (проходящие через полюс) представлены уравнением

где γ - угол подъема линии; то есть, γ = arctan м, куда м это склон линии в декартовой системе координат. Нерадиальная линия, пересекающая радиальную линию φ = γ перпендикулярно в точке (р0, γ) имеет уравнение

Иное (р0, γ) - точка пересечения касательной с воображаемой окружностью радиуса р0.
Полярная роза

А полярная роза представляет собой математическую кривую, которая выглядит как цветок с лепестками и может быть выражена простым полярным уравнением,

для любой постоянной γ0 (в том числе 0). Если k является целым числом, эти уравнения дадут kлепестковая роза, если k является странный, или 2kлепестковая роза, если k даже. Если k является рациональным, но не целым числом, может образоваться роза, но с перекрывающимися лепестками. Обратите внимание, что эти уравнения никогда не определяют розу с 2, 6, 10, 14 и т. Д. Лепестками. В Переменная а непосредственно представляет длину или амплитуду лепестков розы, а k относится к их пространственной частоте. Постоянная γ0 можно рассматривать как фазовый угол.
Архимедова спираль
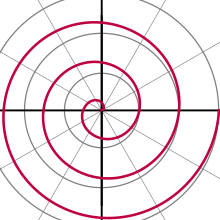
В Архимедова спираль это спираль, которая была открыта Архимед, которое также можно выразить в виде простого полярного уравнения. Он представлен уравнением

Изменение параметра а повернет спираль, а б контролирует расстояние между рукавами, которое для данной спирали всегда постоянно. Спираль Архимеда имеет два рукава, одно для φ > 0 и один для φ < 0. Две руки плавно соединены на полюсе. Если сделать зеркальное отображение одной руки по линии 90 ° / 270 °, получится другая рука. Эта кривая примечательна как одна из первых кривых после конические секции, который будет описан в математическом трактате и как яркий пример кривой, которая лучше всего определяется полярным уравнением.
Конические секции
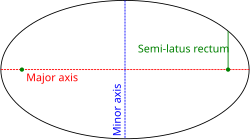
А коническая секция с одним фокусом на полюсе, а другой где-то на луче 0 ° (так что большая ось лежит вдоль полярной оси) определяется выражением:

куда е это эксцентриситет и это полу-латусная прямая кишка (перпендикулярное расстояние в фокусе от большой оси до кривой). Если е > 1, это уравнение определяет гипербола; если е = 1, он определяет парабола; и если е < 1, он определяет эллипс. Особый случай е = 0 последнего приводит к окружности радиуса .

Пересечение двух полярных кривых
Графики двух полярных функций и имеют возможные пересечения трех типов:


- В начале координат, если уравнения и иметь хотя бы одно решение для каждого.
- Все точки куда являются решениями уравнения куда целое число.
- Все точки куда являются решениями уравнения куда целое число.


![[g (heta _ {i}), heta _ {i}]](https://wikimedia.org/api/rest_v1/media/math/render/svg/8c3942e962cea54fd104a33ebac17dde8bffa819)




Сложные числа
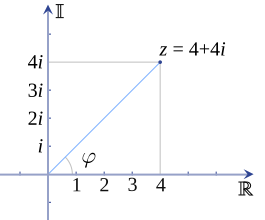
Каждый комплексное число можно представить в виде точки на комплексная плоскость, и поэтому может быть выражено указанием либо декартовых координат точки (называемых прямоугольной или декартовой формой), либо полярных координат точки (называемых полярной формой). Комплексное число z можно представить в прямоугольной форме как

куда я это мнимая единица, или, альтернативно, может быть записан в полярной форме (через приведенные формулы преобразования над ) в качестве

и оттуда как

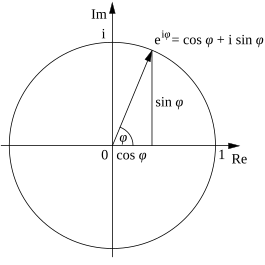
куда е является Число Эйлера, которые эквивалентны, как показано Формула Эйлера.[15] (Обратите внимание, что эта формула, как и все те, которые включают экспоненты углов, предполагает, что угол φ выражается в радианы.) Для преобразования между прямоугольной и полярной формами комплексного числа приведенные формулы преобразования над может быть использован.
Для операций умножение, разделение, и возведение в степень Для комплексных чисел, как правило, гораздо проще работать с комплексными числами, выраженными в полярной форме, а не в прямоугольной. Из законов возведения в степень:
- Умножение
- Разделение
- Возведение в степень (Формула де Муавра )



Исчисление
Исчисление может применяться к уравнениям, выраженным в полярных координатах.[16][17]
Угловая координата φ В этом разделе выражается в радианах, что обычно используется при расчетах.
Дифференциальное исчисление
С помощью Икс = р потому что φ и у = р грех φ, можно вывести связь между производными в декартовых и полярных координатах. Для данной функции ты(Икс,у), следует, что (вычислив ее общие производные )
![{displaystyle {egin {выровнено} r {frac {partial u} {partial r}} & = r {frac {partial u} {partial x}} {frac {partial x} {partial r}} + r {frac {partial u} {partial y}} {frac {partial y} {partial r}}, [2pt] {frac {partial u} {partial varphi}} & = {frac {partial u} {partial x}} {frac { partial x} {partial varphi}} + {frac {partial u} {partial y}} {frac {partial y} {partial varphi}}, конец {выровнено}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1b982a2b1aa08dfd5219a468797b5dc746f5a78f)
или же
![{displaystyle {egin {выровнено} r {frac {partial u} {partial r}} & = r {frac {partial u} {partial x}} cos varphi + r {frac {partial u} {partial y}} sin varphi = x {frac {partial u} {partial x}} + y {frac {partial u} {partial y}}, [2pt] {frac {partial u} {partial varphi}} & = - {frac {partial u} } {partial x}} rsin varphi + {frac {partial u} {partial y}} rcos varphi = -y {frac {partial u} {partial x}} + x {frac {partial u} {partial y}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/242d3229bd257a7adb99575630bbacfea3a2f04c)
Следовательно, имеем следующие формулы:
![{displaystyle {egin {выровнено} r {frac {partial} {partial r}} & = x {frac {partial} {partial x}} + y {frac {partial} {partial y}} [2pt] {frac { partial} {partial varphi}} & = - y {frac {partial} {partial x}} + x {frac {partial} {partial y}}. конец {выровнено}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/215d2d501494c09b74faa68ec3b221f47eea0b4f)
Используя обратное преобразование координат, можно вывести аналогичное взаимное соотношение между производными. Учитывая функцию ты(р,φ), следует, что
![{displaystyle {egin {выровнен} {frac {partial u} {partial x}} & = {frac {partial u} {partial r}} {frac {partial r} {partial x}} + {frac {partial u} { partial varphi}} {frac {partial varphi} {partial x}}, [2pt] {frac {partial u} {partial y}} & = {frac {partial u} {partial r}} {frac {partial r} {partial y}} + {frac {partial u} {partial varphi}} {frac {partial varphi} {partial y}}, конец {выровнено}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/baa953cd580e2e2d99132359e162f159874d9cfe)
или же
![{displaystyle {egin {выравнивание} {frac {partial u} {partial x}} & = {frac {partial u} {partial r}} {frac {x} {sqrt {x ^ {2} + y ^ {2} }}} - {frac {partial u} {partial varphi}} {frac {y} {x ^ {2} + y ^ {2}}} [2pt] & = cos varphi {frac {partial u} {partial r}} - {frac {1} {r}} sin varphi {frac {partial u} {partial varphi}}, [2pt] {frac {partial u} {partial y}} & = {frac {partial u} {partial r}} {frac {y} {sqrt {x ^ {2} + y ^ {2}}}} + {frac {partial u} {partial varphi}} {frac {x} {x ^ {2} + y ^ {2}}} [2pt] & = sin varphi {frac {partial u} {partial r}} + {frac {1} {r}} cos varphi {frac {partial u} {partial varphi}} .end {выровнено}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9292d372faee28d2b8616abfa07a3b40f9dbe681)
Следовательно, мы имеем следующие формулы:
![{displaystyle {egin {выровнено} {frac {partial} {partial x}} & = cos varphi {frac {partial} {partial r}} - {frac {1} {r}} sin varphi {frac {partial} {partial varphi}} [2pt] {frac {partial} {partial y}} & = sin varphi {frac {partial} {partial r}} + {frac {1} {r}} cos varphi {frac {partial} {partial varphi}}. конец {выровнено}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/66ee9f25bdce2fef26323e8ff0c9cb89d56e01ac)
Чтобы найти декартовский наклон касательной к полярной кривой р(φ) в любой заданной точке, кривая сначала выражается как система параметрические уравнения.

Дифференцировать оба уравнения относительно φ дает
![{displaystyle {egin {align} {frac {dx} {dvarphi}} & = r '(varphi) cos varphi -r (varphi) sin varphi [2pt] {frac {dy} {dvarphi}} & = r' ( varphi) sin varphi + r (varphi) cos varphi .end {выровнено}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/341713e0b0d484e169fb6cc867ab6a6e31b7ca65)
Разделив второе уравнение на первое, мы получим декартов наклон касательной к кривой в точке (р(φ), φ):

Для других полезных формул, включая расходимость, градиент и лапласиан в полярных координатах, см. криволинейные координаты.
Интегральное исчисление (длина дуги)
Длина дуги (длина отрезка линии), определяемая полярной функцией, находится путем интегрирования по кривой р(φ). Позволять L обозначим эту длину вдоль кривой, начиная с точек А до точки B, где эти точки соответствуют φ = а и φ = б такой, что 0 < б − а < 2π. Длина L дается следующим интегралом
![L = int _ {a} ^ {b} {sqrt {left [r (varphi) ight] ^ {2} + left [{frac {dr (varphi)} {dvarphi}} ight] ^ {2}}} дварфи](https://wikimedia.org/api/rest_v1/media/math/render/svg/34f62c06ac2868b9ac160abe1e75a075cad9e261)
Интегральное исчисление (площадь)

Позволять р обозначим область, ограниченную кривой р(φ) и лучи φ = а и φ = б, куда 0 < б − а ≤ 2π. Тогда площадь р является
![{гидроразрыв {1} {2}} int _ {a} ^ {b} left [r (varphi) ight] ^ {2}, дварфи.](https://wikimedia.org/api/rest_v1/media/math/render/svg/9fc7958a00360514f36fabcac7cab0361c2ae068)


Этот результат можно найти следующим образом. Во-первых, интервал [а, б] поделен на п подынтервалы, где п - произвольное натуральное число. Таким образом, Δφ, угловая мера каждого подынтервала равна б − а (общая угловая мера интервала), деленная на п, количество подынтервалов. Для каждого подынтервала я = 1, 2, ..., п, позволять φя быть серединой подынтервала, и построить сектор с центром на полюсе, радиус р(φя), центральный угол Δφ и длина дуги р(φя) Δφ. Следовательно, площадь каждого построенного сектора равна
![left [r (varphi _ {i}) ight] ^ {2} pi cdot {frac {Delta varphi} {2pi}} = {frac {1} {2}} left [r (varphi _ {i}) ight] ^ {2} Delta varphi.](https://wikimedia.org/api/rest_v1/media/math/render/svg/ec0cb32735f6a73076e1db62726c0eace3f000f6)
Следовательно, общая площадь всех секторов равна

Как количество подынтервалов п увеличивается, приближение области продолжает улучшаться. В пределе как п → ∞, сумма становится Сумма Римана для указанного выше интеграла.
Механическое устройство, вычисляющее интегралы площадей, - это планиметр, который измеряет площадь плоских фигур, отслеживая их: это воспроизводит интегрирование в полярных координатах путем добавления стыка, так что двухэлементный связь последствия Теорема Грина, конвертируя квадратичный полярный интеграл в линейный интеграл.
Обобщение
С помощью Декартовы координаты, бесконечно малый элемент площади можно вычислить как dA = dx dy. В правило замены для кратных интегралов заявляет, что при использовании других координат Якобиан Необходимо учитывать определитель формулы преобразования координат:
![{displaystyle J = det {frac {partial (x, y)} {partial (r, varphi)}} = {egin {vmatrix} {frac {partial x} {partial r}} & {frac {partial x} {partial varphi}} [2pt] {frac {partial y} {partial r}} & {frac {partial y} {partial varphi}} end {vmatrix}} = {egin {vmatrix} cos varphi & -rsin varphi sin varphi & rcos varphi end {vmatrix}} = rcos ^ {2} varphi + rsin ^ {2} varphi = r.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/52a1293fcb0e90b77017c0d9176c62aa06615b9b)
Следовательно, элемент площади в полярных координатах можно записать как

Теперь функцию, заданную в полярных координатах, можно проинтегрировать следующим образом:

Здесь, р это та же область, что и выше, а именно область, ограниченная кривой р(ϕ) и лучи φ = а и φ = б. Формула для площади р упомянутое выше можно получить, взяв ж тождественно равно 1.

Более удивительное применение этого результата дает Гауссов интеграл, здесь обозначено K:

Векторное исчисление
Векторное исчисление также может применяться к полярным координатам. Для плоского движения пусть быть вектором положения (р cos (φ), р грех (φ)), с р и φ в зависимости от времени т.

Определим единичные векторы

в направлении и

в плоскости движения, перпендикулярной радиальному направлению, где - единичный вектор, нормальный к плоскости движения.

потом

Центробежные и кориолисовы термины



Период, термин иногда называют центростремительное ускорение, а срок как Кориолисовое ускорение. Например, см. Шанкар.[18]


Примечание: эти члены, которые появляются, когда ускорение выражается в полярных координатах, являются математическим следствием дифференцирования; они появляются всякий раз, когда используются полярные координаты. В динамике планарных частиц эти ускорения появляются при настройке Ньютона. второй закон движения во вращающейся системе отсчета. Здесь эти дополнительные термины часто называют фиктивные силы; фиктивны, потому что они просто результат изменения системы координат. Это не значит, что их не существует, скорее они существуют только во вращающейся рамке.
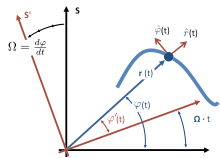
Совместно вращающаяся рама
Для частицы, движущейся в плоскости, один из подходов к приданию физического значения этим терминам основан на концепции мгновенного совместно вращающаяся система отсчета.[19] Чтобы определить совместно вращающуюся раму, сначала выбирается исходная точка, от которой расстояние р(т) к частице. Устанавливается ось вращения, перпендикулярная плоскости движения частицы и проходящая через это начало. Затем в выбранный момент т, скорость вращения совместно вращающейся системы Ω согласована со скоростью вращения частицы вокруг этой оси, dφ/dt. Далее, члены ускорения в инерциальной системе отсчета связаны с членами в системе одновременного вращения. Пусть положение частицы в инерциальной системе отсчета (р(т), φ(т)), а в совместно вращающейся системе отсчета быть (г (т), φ′ (T)). Поскольку вращающаяся в одном направлении рамка вращается с той же скоростью, что и частица, dφ′/dt = 0. Фиктивная центробежная сила в совместно вращающейся раме равна мрОм2, радиально наружу. Скорость частицы в совместно вращающейся системе отсчета также направлена радиально наружу, потому что dφ′/dt = 0. Значение фиктивная сила Кориолиса поэтому имеет значение −2м(доктор/dt) Ω, направленный в сторону увеличения φ Только. Таким образом, используя эти силы во втором законе Ньютона, мы находим:

где над точками обозначены временные дифференциации, а F это чистая реальная сила (в отличие от фиктивных сил). С точки зрения компонентов это векторное уравнение принимает следующий вид:

которые можно сравнить с уравнениями для инерциальной системы отсчета:

Это сравнение, плюс признание того, что по определению совместно вращающегося кадра во времени т он имеет скорость вращения Ω = dφ/dt, показывает, что мы можем интерпретировать члены ускорения (умноженные на массу частицы), найденные в инерциальной системе отсчета, как отрицательные значения центробежных и кориолисовых сил, которые можно было бы увидеть в мгновенной, неинерциальной, вращающейся в одном направлении системе координат. .
Для общего движения частицы (в отличие от простого кругового движения) центробежные силы и силы Кориолиса в системе отсчета частицы обычно называют мгновенными. соприкасающийся круг его движения, а не к фиксированному центру полярных координат. Подробнее см. центростремительная сила.
Дифференциальная геометрия
В современной терминологии дифференциальная геометрия, полярные координаты обеспечивают карты координат для дифференцируемое многообразие ℝ2 {(0,0)}, плоскость минус начало координат. В этих координатах евклидова метрический тензор дан кем-то




Расширения в 3D
Полярная система координат расширена до трех измерений с двумя разными системами координат: цилиндрический и сферическая система координат.
Приложения
Полярные координаты двумерны, поэтому их можно использовать только там, где точки лежат на одной двумерной плоскости. Они наиболее подходят в любом контексте, где рассматриваемое явление по своей природе привязано к направлению и длине от центральной точки. Например, приведенные выше примеры показывают, насколько элементарных полярных уравнений достаточно для определения кривых, таких как спираль Архимеда, уравнение которой в декартовой системе координат было бы гораздо более сложным. Более того, многие физические системы - например, те, которые связаны с телами, движущимися вокруг центральной точки, или с явлениями, происходящими из центральной точки - проще и интуитивно понятнее моделировать с использованием полярных координат. Первоначальной мотивацией к введению полярной системы было изучение круговой и орбитальное движение.
Полярные координаты часто используются в навигация в качестве пункта назначения или направления движения можно указать угол и расстояние до рассматриваемого объекта. Например, самолет используйте для навигации слегка измененную версию полярных координат. В этой системе, обычно используемой для любого вида навигации, луч 0 ° обычно называется курсом 360, а углы продолжаются в по часовой стрелке направление, а не против часовой стрелки, как в математической системе. Заголовок 360 соответствует магнитный север, а заголовки 90, 180 и 270 соответствуют магнитному востоку, югу и западу соответственно.[20] Таким образом, самолет, летящий в 5 морских милях на восток, будет лететь на 5 единиц по курсу 90 (читать ноль-девять-ноль к управления воздушным движением ).[21]
Моделирование
Отображение систем радиальная симметрия обеспечивают естественные настройки для полярной системы координат, при этом центральная точка действует как полюс. Ярким примером такого использования является уравнение потока грунтовых вод применительно к радиально-симметричным скважинам. Системы с радиальная сила также хорошие кандидаты для использования полярной системы координат. Эти системы включают гравитационные поля, которые подчиняются закон обратных квадратов, а также системы с точечные источники, Такие как радиоантенны.
Радиально-асимметричные системы также можно моделировать с помощью полярных координат. Например, микрофон с образец пикапа иллюстрирует его пропорциональную реакцию на входящий звук с заданного направления, и эти шаблоны могут быть представлены в виде полярных кривых. Кривая для стандартного кардиоидного микрофона, наиболее распространенного однонаправленного микрофона, может быть представлена как р = 0,5 + 0,5 дюйма (ϕ) на целевой проектной частоте.[22] На более низких частотах картина смещается в сторону всенаправленности.
Смотрите также
- Криволинейные координаты
- Список канонических преобразований координат
- Лог-полярные координаты
- Полярное разложение
- Единичный круг
Рекомендации
- ^ Браун, Ричард Г. (1997). Эндрю М. Глисон (ред.). Высшая математика: предварительное вычисление с дискретной математикой и анализом данных. Эванстон, Иллинойс: Макдугал Литтел. ISBN 0-395-77114-5.
- ^ Дружелюбный, Майкл (24 августа 2009 г.). «Вехи в истории тематической картографии, статистической графики и визуализации данных» (PDF).
- ^ Кинг, Дэвид А. (2005). «Сакральная география ислама». In Koetsier, Teun; Люк, Бергманс (ред.). Математика и божественное: историческое исследование. Амстердам: Эльзевир. С. 162–78. ISBN 0-444-50328-5.CS1 maint: ref = harv (связь)
- ^ Король (2005, п. 169 ). Расчеты были настолько точными, насколько это было возможно при ограничениях, наложенных их предположением, что Земля является идеальной сферой.
- ^ а б Кулидж, Джулиан (1952). «Происхождение полярных координат». Американский математический ежемесячный журнал. Математическая ассоциация Америки. 59 (2): 78–85. Дои:10.2307/2307104. JSTOR 2307104.
- ^ Бойер, К. Б. (1949). «Ньютон как создатель полярных координат». Американский математический ежемесячный журнал. Математическая ассоциация Америки. 56 (2): 73–78. Дои:10.2307/2306162. JSTOR 2306162.
- ^ Миллер, Джефф. «Самые ранние известные применения некоторых слов математики». Получено 2006-09-10.
- ^ Смит, Дэвид Юджин (1925). История математики, Том II. Бостон: Ginn and Co., стр. 324.
- ^ Serway, Raymond A .; Джуэтт-младший, Джон В. (2005). Принципы физики. Брукс / Коул - обучение Томсона. ISBN 0-534-49143-X.CS1 maint: несколько имен: список авторов (связь)
- ^ «Полярные координаты и графики» (PDF). 2006-04-13. Получено 2006-09-22.[постоянная мертвая ссылка ]
- ^ Ли, Теодор; Дэвид Коэн; Дэвид Скляр (2005). Precalculus: с тригонометрией единичного круга (Четвертое изд.). Томсон Брукс / Коул. ISBN 0-534-40230-5.
- ^ Стюарт, Ян; Дэвид Толл (1983). Комплексный анализ (Путеводитель по самолету). Издательство Кембриджского университета. ISBN 0-521-28763-4.
- ^ Торренс, Брюс Фоллетт; Ева Торренс (1999). Введение в математику для студентов. Издательство Кембриджского университета. ISBN 0-521-59461-8.
- ^ Клэйс, Йохан. "Полярные координаты". Архивировано из оригинал на 2006-04-27. Получено 2006-05-25.
- ^ Смит, Джулиус О. (2003). «Тождество Эйлера». Математика дискретного преобразования Фурье (ДПФ). Издательство W3K. ISBN 0-9745607-0-7. Архивировано из оригинал на 2006-09-15. Получено 2006-09-22.
- ^ Хуш, Лоуренс С. «Области, ограниченные полярными кривыми». Получено 2006-11-25.
- ^ Лоуренс С. Хуш. «Касательные линии к полярным графам». Получено 2006-11-25.
- ^ Рамамурти Шанкар (1994). Принципы квантовой механики (2-е изд.). Springer. п. 81. ISBN 0-306-44790-8.
- ^ Для следующего обсуждения см. Джон Р. Тейлор (2005). Классическая механика. Книги университетских наук. п. §9.10, стр. 358–359. ISBN 1-891389-22-X.
- ^ Шанти, Сумрит. «Авиационная навигационная система». Получено 2006-11-26.
- ^ «Экстренные процедуры» (PDF). Архивировано из оригинал (PDF) на 2013-06-03. Получено 2007-01-15.
- ^ Эргл, Джон (2005). Справочник по звукозаписи (Четвертое изд.). Springer. ISBN 0-387-28470-2.
Общие ссылки
- Адамс, Роберт; Кристофер Эссекс (2013). Исчисление: полный курс (Восьмое изд.). Pearson Canada Inc. ISBN 978-0-321-78107-9.
- Антон, Ховард; Ирл Бивенс; Стивен Дэвис (2002). Исчисление (Седьмое изд.). Anton Textbooks, Inc. ISBN 0-471-38157-8.
- Финни, Росс; Джордж Томас; Франклин Демана; Берт Уэйтс (июнь 1994 г.). Исчисление: графическое, числовое, алгебраическое (Версия с одной переменной). Addison-Wesley Publishing Co. ISBN 0-201-55478-X.