Deepsea Challenger - Deepsea Challenger
 Рисунок DCV1, основанный на изображениях с Deepsea Challenger сайт (не в масштабе) | |
| История | |
|---|---|
| Имя: | Deepsea Challenger |
| Строитель: | Acheron Project Pty Ltd |
| Запущено: | 26 января 2012 г. |
| В сервисе: | 2012 |
| Положение дел: | Действует с 2018 г. |
| Общие характеристики | |
| Тип: | Глубоководный аппарат |
| Смещение: | 11,8 тонн |
| Длина: | 7,3 м (24 футов) |
| Установленная мощность: | электрический двигатель |
| Движение: | 12 двигателей |
| Скорость: | 3 узла (5,6 км / ч; 3,5 миль / ч) |
| Выносливость: | 56 часов |
| Глубина теста: | 11000 м (36000 футов) |
| Дополнение: | 1 |
Deepsea Challenger (DCV 1) - 7,3 метра (24 фута) глубоководный аппарат предназначен для достижения дна Challenger Deep, самая глубокая из известных точек на Земле. 26 марта 2012 г. канадский кинорежиссер Джеймс Кэмерон пилотировал корабль для достижения этой цели во втором пилотируемом погружении в Глубину Челленджера.[1][2][3][4] Встроенный Сидней, Австралия исследовательской и проектной компании Acheron Project Pty Ltd, Deepsea Challenger включает в себя научное оборудование для отбора проб и высокое разрешение 3-D камеры; он достиг самой глубокой точки океана после двух часов и 36 минут спуска с поверхности.[1][5]
Разработка
Deepsea Challenger был построен в Австралии в партнерстве с Национальное географическое общество и при поддержке Rolex, в программе Deepsea Challenge. Строительством подводной лодки руководил австралийский инженер. Рон Аллум.[6] Многие из членов команды разработчиков подводных лодок являются выходцами из сиднейского братства пещерных дайверов, включая самого Аллума с многолетним опытом пещерного дайвинга.[нужна цитата ]
Работа в небольшой инженерной мастерской в г. Leichhardt, Сидней, Allum создал новые материалы, в том числе специализированные конструкционные синтаксическая пена называется Isofloat,[7] способен выдерживать огромные сжимающие силы на глубине 11 километров (6,8 миль). Новая пена уникальна тем, что она более однородна и обладает большей однородной прочностью, чем другие коммерчески доступные синтаксические пены, но при удельной плотности около 0,7 она будет плавать в воде. Пена состоит из очень маленьких полых стеклянных сфер, подвешенных в эпоксидной смоле, и составляет около 70% объема подводной лодки.[8]
Прочность пены позволила Deepsea Challenger конструкторам необходимо включить двигатели подруливающих устройств как часть инфраструктуры, установленной внутри пенопласта, но без помощи стального каркаса для установки различных механизмов. Пена заменяет бензин -наполненные резервуары для флотации, используемые в исторических батискаф Триест.
Allum также разработал множество инноваций, необходимых для преодоления ограничений существующих продуктов (и в настоящее время разрабатываются для других глубоководных аппаратов). К ним относятся маслозаполненные двигатели с балансировкой давления;[9]Светодиодные осветительные решетки; новые типы фотоаппаратов; а также быстрые и надежные кабели связи, позволяющие передавать данные через корпус подводного аппарата.[10] Аллум приобрел значительную часть своего опыта разработки электронных средств связи, используемых Кэмероном. Титаник ныряет в кино Призраки бездны, Бисмарк и другие.[10][11]
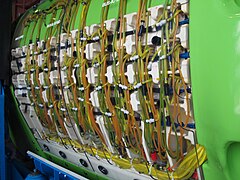
Энергетические системы для подводной лодки обеспечивались литиевыми батареями, которые были размещены внутри пенопласта и хорошо видны на рекламных фотографиях судна.[12] Системы зарядки литиевых аккумуляторов были разработаны Роном Аллумом.[13]Подводный аппарат содержит более 180 бортовых систем, включая батареи, двигатели, системы жизнеобеспечения, 3D-камеры и светодиодное освещение.[14] Эти взаимосвязанные системы контролируются и контролируются программируемый контроллер автоматизации (PAC) из Темекула, Калифорния производитель элементов управления Опто 22.[15][16][17][18] Во время погружений система управления также записывала глубину, курс, температуру, давление, состояние батареи и другие данные и отправляла их на корабль поддержки с трехминутными интервалами.[19] через подводная акустическая связь Система разработана западно-австралийской компанией L-3 Nautronix.[20][21]
Важнейшие структурные элементы, такие как каркас и пилотная сфера, на которых находился Кэмерон, были спроектированы Тасманский Компания Finite Elements.[22] Дизайн внутренней части сферы, включая противопожарную защиту, предотвращение образования конденсата и установку контрольных узлов, был выполнен консалтинговой компанией Design + Industry из Сиднея.[23]

Характеристики
Подводная лодка оснащена пилотной сферой диаметром 1,1 метра (43 дюйма), которой достаточно для одного человека.[24] Сфера со стальными стенками толщиной 64 мм (2,5 дюйма) прошла испытания на способность выдерживать требуемые 114 мегапаскали (16,500 фунтов на квадратный дюйм ) давления в барокамере при Государственный университет Пенсильвании.[25] Сфера находится в основании 11,8-тонна (13.0-короткая тонна ) средство передвижения. Транспортное средство работает в вертикальном положении и несет 500 кг (1100 фунтов) балластного веса, что позволяет ему как опускаться на дно, так и при отпускании подниматься на поверхность. Если система сброса балластного груза выйдет из строя, и судно окажется на дне моря, резервный гальванический выпуск предназначен для коррозии в соленой воде за установленный период времени, позволяя подводному устройству автоматически всплывать на поверхность.[26] Deepsea Challenger меньше одной десятой веса своего пятидесятилетнего предшественника, батискафа Триест; современный автомобиль также имеет значительно больше научного оборудования, чем Триест, и способен на более быстрый подъем и спуск.[27]

В верхней части расположены системы размещения и освещения.
Массив батарей

Один из двигателей

Нижняя часть, внутри которой находится пилотная сфера. Вот контейнер, который использовался для перевозки балласта.

Модель пилотной сферы в натуральную величину

Штриховка и окно просмотра

Интерьер модели пилотной сферы







Погружения
Ранние погружения
В конце января 2012 года, чтобы проверить системы, Кэмерон провел три часа в подводном аппарате, находясь под водой на австралийской Сиднейской военно-морской верфи.[28] 21 февраля 2012 года тестовое погружение, предназначенное для достижения глубины более 1000 м (3300 футов), было прервано всего через час из-за проблем с камерами и системы жизнеобеспечения.[29] 23 февраля 2012 г., недалеко от Остров Новая Британия, Кэмерон успешно поднял подводный аппарат на дно океана на высоту 991 м (3251 фут), где он встретился с желтым дистанционно управляемый автомобиль управлялся с корабля выше.[30] 28 февраля 2012 года во время семичасового погружения Кэмерон провел шесть часов в подводном аппарате на глубине 3700 м (12 100 футов). Колебания энергосистемы и непредвиденные токи создали неожиданные проблемы.[31][32]
4 марта 2012 г. рекордное погружение на глубину более 7260 м (23 820 футов) остановилось незадолго до дна. Траншея Новой Британии когда проблемы с вертикальными двигателями заставили Кэмерона вернуться на поверхность.[33] Несколько дней спустя, когда техническая проблема была решена, Кэмерон успешно доставил подводный аппарат на дно желоба Новой Британии, достигнув максимальной глубины 8 221 м (26 972 фута).[33] Там он нашел широкую равнину осадок, анемоны, медуза и различные места обитания там, где равнина встречается со стенами каньона.[33]
Challenger Deep
18 марта 2012 г., покинув полигон в относительно спокойном Море Соломона, подводный аппарат находился на борту надводного корабля Русалка Сапфир, пристыкован Апра Харбор, Гуам, проходит ремонт и модернизация и ждет спокойного океана, чтобы совершить погружение.[34][35] К 24 марта 2012 г., покинув порт Гуама несколькими днями ранее, подводный аппарат находился на борту одного из двух надводных судов, вышедших из порта. Улити атолл Челленджера.[36][37]
26 марта 2012 г. сообщалось, что он достиг дна Марианская впадина.


Спуск от начала погружения до выхода на морское дно занял два часа 37 минут, что почти в два раза быстрее, чем спуск. Триест.[39] Часы Rolex, «надетые» на роботизированную руку субмарины, продолжали нормально работать на протяжении всего погружения.[40][41] Не все системы во время погружения работали так, как планировалось: спускаемые аппараты с приманкой не сбрасывались перед погружением, потому что гидролокатор, необходимый для их обнаружения на дне океана, не работал, а проблемы с гидравлической системой препятствовали использованию оборудования для отбора проб.[39] Тем не менее, после примерно трех часов на морском дне и успешного восхождения, дальнейшее исследование Глубины Челленджера с помощью уникальной подводной лодки было запланировано на более позднюю весну 2012 года.[39]
Записи
26 марта 2012 года Кэмерон достиг дна Челленджера, самой глубокой части Марианская впадина. Максимальная глубина, зарегистрированная во время этого рекордного погружения, составила 10 908 метров (35 787 футов).[42] Согласно измерениям Кэмерона, в момент приземления глубина составляла 10 898 м (35 756 футов).[43] Это было четвертое погружение в Глубину Челленджера и второе погружение человека (с максимальной зарегистрированной глубиной немного меньше, чем у Триестс Погружение 1960 г.). Это было первое одиночное погружение и первое, потратившее значительное количество времени (три часа) на изучение дна.[1]
Последующие события
Deepsea Challenger был подарен Океанографическое учреждение Вудс-Хоул для изучения своих технологических решений, чтобы включить некоторые из этих решений в другие аппараты для продвижения глубоководных исследований.[44] 23 июля 2015 г. он был доставлен из Океанографического института Вудс-Хоул в Балтимор для отправки в Австралию на временную ссуду. На грузовике с платформой на Межгосударственный 95 в Коннектикуте загорелся грузовик, в результате чего был поврежден подводный аппарат. Вероятная причина возгорания - отказ тормозов грузовика, в результате которого загорелись задние колеса. Чиновники пожарной охраны Коннектикута предположили, что это была полная потеря для Deepsea Challenger; однако о фактических масштабах ущерба не сообщается. После пожара аппарат был доставлен обратно в Океанографический институт Вудс-Хоул.[45] По состоянию на февраль 2016 года его перевезли в Калифорнию для ремонта.[46]
Подобные усилия
Этот раздел должен быть обновлено. (Январь 2019) |
По состоянию на февраль 2012 года несколько других машин находятся в стадии разработки, чтобы достичь той же глубины. Группы, разрабатывающие их, включают:
- Подводные лодки Triton, компания из Флориды, которая разрабатывает и производит частные подводные лодки, чья машина, Тритон 36000/3, доставит экипаж из трех человек на дно за 120 минут.[47]
- Virgin Oceanic, при поддержке Ричард Брэнсон с Virgin Group, разрабатывает подводный аппарат, разработанный Грэм Хоукс, DeepFlight Challenger,[48] с которой одиночному пилоту потребуется 140 минут, чтобы добраться до морского дна.[49]
- DOER Marine,[50] а Область залива Сан-Франциско основанная в 1992 году компания морских технологий, которая занимается разработкой транспортного средства, Deepsearch (и Ocean Explorer HOV Безлимитный ),[51] при некоторой поддержке со стороны Google с Эрик Шмидт с которой экипажу из двух или трех человек потребуется 90 минут, чтобы добраться до морского дна, как программа Глубокий поиск.[51]
Смотрите также
- Челленджер экспедиция - Океанографическая исследовательская экспедиция (1872–1876 гг.)
- Глубоководные исследования - Исследование физических, химических и биологических условий на морском дне
- Хронология технологий дайвинга - Хронологический список заметных событий в истории подводного плавания.
Рекомендации
- ^ а б c Тан, Кер (25 марта 2012 г.). «Джеймс Кэмерон завершил рекордное погружение в Марианской впадине». Национальное географическое общество. Получено 25 марта 2012.
- ^ Броуд, Уильям Дж. (25 марта 2012 г.). «Кинематографист в подводном плавании на дно моря». Нью-Йорк Таймс. Получено 25 марта 2012.
- ^ «Джеймс Кэмерон достиг самой глубокой точки на Земле». Новости NBC. AP. 25 марта 2012 г.. Получено 25 марта 2012.
- ^ Ингрэм, Натан (9 марта 2012 г.). «Джеймс Кэмерон и его подводная лодка Deepsea Challenger». theverge.com. Получено 10 марта 2012.
- ^ «Гонка на дно океана: Кэмерон». BBC. 22 февраля 2012 г.. Получено 10 марта 2012.
- ^ Аллум, Рон. "Рон Аллум". Получено 23 июля 2012.
- ^ Аллум, Рон. «Изофлот». Архивировано из оригинал 29 июля 2013 г.. Получено 23 июля 2012.
- ^ Бауш, Джеффри (12 марта 2012 г.). «Голливудский режиссер Джеймс Кэмерон пилотирует подводную лодку на дно Марианской впадины». Архивировано из оригинал 17 апреля 2012 г.. Получено 9 апреля 2012.
- ^ «Подруливающее устройство со встроенным драйвером PBOF». Архивировано из оригинал 29 июля 2013 г.. Получено 23 июля 2012.
- ^ а б "Рон Аллум". Deepsea Challenge: Национальная география. Архивировано из оригинал 31 июля 2012 г.. Получено 24 июля 2012.
- ^ "Фильмография Рона Аллума". Нью-Йорк Таймс. Получено 8 мая 2012.
- ^ «Литий-полимерные батареи (LIPO)». Архивировано из оригинал 29 июля 2013 г.. Получено 8 июля 2012.
- ^ «Архивная копия». Архивировано из оригинал 10 августа 2016 г.. Получено 12 июн 2016.CS1 maint: заархивированная копия как заголовок (связь)
- ^ «Системные технологии». Deepsea Challenge (National Geographic). Архивировано из оригинал 3 мая 2012 г.. Получено 8 мая 2012.
- ^ Рэй, Тиффани (11 мая 2012 г.). «Фирма Temecula принимает участие в проекте Джеймса Кэмерона». Пресс-Предприятие. Получено 17 мая 2012.
- ^ Майо, Пат (9 апреля 2012 г.). «Кинорежиссер Джеймс Кэмерон летит на дно Марианской впадины благодаря Opto 22 Темекулы». North County Times. Архивировано из оригинал 15 апреля 2012 г.. Получено 8 мая 2012.
- ^ «Производительность под давлением - стандартная система SNAP PAC контролирует ЗАДАЧУ ГЛУБИНЫ для исторического погружения Джеймса Кэмерона». Opto 22. Архивировано с оригинал 29 сентября 2015 г.. Получено 8 мая 2012.
- ^ «Историческое возвращение Джеймса Кэмерона в Марианскую впадину основано на последних достижениях в области техники и технологий» (PDF) (Пресс-релиз). Опто 22. 3 апреля 2012 г.. Получено 8 мая 2012.
- ^ "У нас есть подводная лодка для глубокого погружения". Deepsea Challenge (National Geographic). Архивировано из оригинал 12 марта 2012 г.. Получено 8 мая 2012.
- ^ Берк, Луиза (16 апреля 2012 г.). "Инженеры WA слышат голос из глубины". Западная Австралия. Получено 25 июн 2014.
- ^ Робертс, Пол. «Голоса из глубины - Акустическая связь с подводной лодкой на дне Марианской впадины» (PDF). Австралийское акустическое общество. Получено 25 июн 2014.
- ^ Давид Бенюк (27 марта 2012 г.). «Инженер Тэсси в восторге от погружения Кэмерона». Sydney Morning Herald. Получено 27 марта 2012.
- ^ "Сфера пилотов Deepsea Challenger". Дизайн и промышленность. Получено 1 декабря 2012.
- ^ «Субфакты». Deepsea Challenge (National Geographic). Получено 10 марта 2012.
- ^ «Пилот Сфера». Deepsea Challenge (National Geographic). Получено 10 марта 2012.
- ^ «Системы и технологии». Deepsea Challenge (National Geographic). Получено 10 марта 2012.
- ^ "Тогда и сейчас". Deepsea Challenge (National Geographic). Получено 10 марта 2012.
- ^ "Джим совершает первое пилотируемое погружение". Deepsea Challenge (National Geographic). 31 января 2012. Архивировано из оригинал 12 марта 2012 г.. Получено 10 марта 2012.
- ^ "Адская камера". Deepsea Challenge (National Geographic). 22 февраля 2012. Архивировано с оригинал 12 марта 2012 г.. Получено 10 марта 2012.
- ^ "У нас есть подводная лодка для глубокого погружения". Deepsea Challenge (National Geographic). 23 февраля 2012 г. Архивировано с оригинал 12 марта 2012 г.. Получено 10 марта 2012.
- ^ «Истины после погружения». Deepsea Challenge (National Geographic). 29 февраля 2012. Архивировано с оригинал 12 марта 2012 г.. Получено 10 марта 2012.
- ^ «Критический шаг». Deepsea Challenge (National Geographic). 28 февраля 2012. Архивировано с оригинал 14 марта 2012 г.. Получено 10 марта 2012.
- ^ а б c Кэмерон, Джеймс (8 марта 2012 г.). "Тебе бы это понравилось". Национальное географическое общество. Получено 26 марта 2012.
- ^ "Ocean Swells". Deepsea Challenge (National Geographic). 10 марта 2012. Архивировано с оригинал 15 марта 2012 г.. Получено 13 марта 2012.
- ^ "Улей работы". Deepsea Challenge (National Geographic). 18 марта 2012 г. Архивировано с оригинал 21 марта 2012 г.. Получено 21 марта 2012.
- ^ "Миссия в Марианской впадине в эти выходные?". Deepsea Challenge (National Geographic). 24 марта 2012. Архивировано с оригинал 26 марта 2012 г.. Получено 24 марта 2012.
- ^ «Кэмерон направляется на дно океана». Гражданин Оттавы. 21 марта 2012 г. Архивировано с оригинал 24 марта 2012 г.. Получено 23 марта 2012.
- ^ Аллен, Пол Дж. (27 марта 2012 г.). "Твиты Пола Аллена из Challenger Deep". twitter.com. Получено 27 марта 2012.
- ^ а б c Уильям Дж. Броуд (27 марта 2012 г.). «Режиссер Джеймс Кэмерон совершает поездку в самую глубокую точку Земли». Бостонский глобус. Получено 29 марта 2012.
- ^ "Rolex Deep-sea History". deepseachallenge.com. Архивировано из оригинал 24 марта 2012 г.. Получено 1 апреля 2012.
- ^ «О конкурсе Rolex Deepsea Challenge». rolex.com. Архивировано из оригинал 3 апреля 2012 г.. Получено 1 апреля 2012.
- ^ «ГЛУБИННЫЙ ВЫЗОВ: факты с первого взгляда». Deepsea Challenge (National Geographic). Архивировано из оригинал 25 июня 2014 г.. Получено 29 июн 2014.
- ^ Deepsea Challenge 3D (2014)
- ^ «Джеймс Кэмерон сотрудничает с WHOI». Национальная география. 26 марта 2013 г.. Получено 27 марта 2013.
- ^ «Историческая подводная лодка, которую использовал Джеймс Кэмерон, вероятно, уничтожена в огне: официальные лица». NBC Коннектикут. 23 июля 2015 г.. Получено 19 октября 2015.
- ^ Дрисколл, Шон Ф. (16 февраля 2016 г.). «Deepsea Challenger переезжает в Калифорнию на ремонт». Кейп-Код Таймс. Получено 31 мая 2017.
- ^ «Подводный аппарат для полной глубины океана Triton 36000». Подводные лодки Тритон. Архивировано из оригинал 29 марта 2012 г.. Получено 25 марта 2012.
- ^ Virgin Oceanic, Операционная команда (по состоянию на 25 марта 2012 г.)
- ^ "Virgin Oceanic". Virgin Oceanic. Получено 1 марта 2012.
- ^ «О ДОЭР Марин». DOER Marine. Получено 27 марта 2012.
- ^ а б «Глубокий поиск». DOER Marine. Получено 25 марта 2012.
внешняя ссылка
 СМИ, связанные с Deepsea Challenger в Wikimedia Commons
СМИ, связанные с Deepsea Challenger в Wikimedia Commons- Официальный веб-сайт

- Статья об использовании вычислительной гидродинамики в процессе проектирования Deepsea Challenger
- Видео NGS: возвращение Кэмерон из Challenger Deep
- Deepsea Challenge 3D на IMDb, 2014 г. National Geographic Channel документальный.