Сонар - Sonar


Сонар (звуковая навигация) - это метод, использующий звук распространение (обычно под водой, как в подводное плавание ) к перемещаться, общаться с объектами на воде или под водой, например, с другими судами, или обнаруживать их.[2] Два типа технологий имеют название «гидролокатор»: пассивный гидролокатор, по сути, прислушивается к звукам, издаваемым судами; активный сонар излучает импульсы звуков и прислушивается к эхо. Сонар может использоваться как средство акустическая локация и измерения характеристик эха «целей» в воде. Акустическая локация в воздухе использовалась до внедрения радар. Сонар также может использоваться для навигации роботов,[3] и СОДАР (направленный вверх гидролокатор) используется для исследования атмосферы. Период, термин сонар также используется для оборудования, используемого для генерации и приема звука. Акустические частоты, используемые в сонарных системах, варьируются от очень низких (инфразвуковой ) до чрезвычайно высокого (ультразвуковой ). Изучение подводного звука известно как подводная акустика или же гидроакустика.
Первое зарегистрированное использование техники было Леонардо да Винчи в 1490 г. он использовал трубку, вставленную в воду, для обнаружения сосудов на слух.[4] Он был разработан во время Первой мировой войны, чтобы противостоять растущей угрозе подводная война, с оперативным пассивный сонар Система использовалась к 1918 году.[2] Современные активные гидролокаторы используют акустический преобразователь генерировать звуковую волну, которая отражается от целевых объектов.[2]
История
Хотя некоторые животные (дельфины, летучие мыши, немного землеройки и др.) использовали звук для связи и обнаружения объектов в течение миллионов лет, использование людьми в воде первоначально записывается Леонардо да Винчи в 1490 году: трубка, вставленная в воду, использовалась для обнаружения сосудов путем поднесения к трубке уха.[4]
В конце 19 века подводный колокол использовался как вспомогательное средство для маяки или же маяки для предупреждения об опасностях.[5]
Использование звука для "эхолокации" под водой так же, как летучие мыши используют звук для воздушной навигации, похоже, было вызвано Титаник катастрофа 1912 года.[6] Первый в мире патент для подводного эхолокационного прибора был подан в британский Патентное бюро английский метеоролог Льюис Фрай Ричардсон через месяц после затопления Титаник,[7] и немецкий физик Александр Бем получил патент на эхолот в 1913 году.[8]
Канадский инженер Реджинальд Фессенден, работая в компании Submarine Signal Company в г. Бостон, Массачусетс, построил экспериментальную систему, начиная с 1912 года, систему, позже испытанную в Бостонской гавани, и, наконец, в 1914 году от Управления доходов США. Майами на Гранд Бэнкс выключенный Ньюфаундленд.[7][9] В этом тесте Фессенден продемонстрировал зондирование глубины, подводную связь (азбука Морзе ) и эхолокации (обнаружение айсберга на расстоянии 2 мили, 3,2 км).[10][11] "Осциллятор Фессендена ", работавший на частоте около 500 Гц, не смог определить азимут айсберга из-за длины волны 3 метра и малых размеров излучающей поверхности датчика (менее1⁄3 длина волны в диаметре). Десять Монреаль -строенный Британские подводные лодки H-класса выпущенные в 1915 году, были оснащены генераторами Фессендена.[12]
В течение Первая Мировая Война необходимость обнаружения подводные лодки побудили к дальнейшим исследованиям в области использования звука. Британцы рано начали использовать подводные подслушивающие устройства, называемые гидрофоны, а французский физик Поль Ланжевен Работая с русским иммигрантом-электриком Константином Чиловским, работал над разработкой активных звуковых устройств для обнаружения подводных лодок в 1915 году. Хотя пьезоэлектрический и магнитострикционный преобразователи позже заменили электростатический преобразователи, которые они использовали, эта работа повлияла на будущие разработки. Легкая звукопоглощающая пластиковая пленка и волоконная оптика используются для гидрофонов, а Терфенол-Д и PMN (ниобат свинца и магния) были разработаны для проекторов.
ASDIC

В 1916 году под британским Совет по изобретениям и исследованиям, Канадский физик Роберт Уильям Бойл взяли на себя активный проект обнаружения звука с А. Б. Вуд, изготовив опытный образец для испытаний в середине 1917 года. Эта работа для Противолодочного дивизиона британского военно-морского штаба была проведена в строжайшей секретности и использовала кварцевые пьезоэлектрические кристаллы для создания первого в мире практического подводного активного устройства обнаружения звука. Для сохранения секретности не было сделано никакого упоминания о звуковых экспериментах или кварце - слово, используемое для описания ранних работ («сверхзвуковые») было изменено на «ASD» ics, а кварцевый материал - на «ASD» ivite: «ASD» для « Anti-Submarine Division ", отсюда и английское сокращение ASDIC. В 1939 г. в ответ на вопрос Оксфордский словарь английского языка, то Адмиралтейство выдумал историю о том, что это означало «Союзный комитет по обнаружению подводных лодок», и это до сих пор широко распространено,[13] хотя в архивах Адмиралтейства не было найдено ни одного комитета с таким названием.[14]
К 1918 году Великобритания и Франция построили прототипы активных систем. Британцы протестировали свой ASDIC на HMSАнтрим в 1920 году и начала производство в 1922 году. В 1923 году 6-я флотилия эсминцев имела суда, оснащенные ASDIC. Противолодочная школа HMS Скопа и обучение флотилия из четырех судов были установлены на Портленд в 1924 г.
К вспышке Вторая Мировая Война, то Королевский флот имел пять комплектов для разных классов надводных кораблей и другие для подводных лодок, включенных в полную противолодочную систему. Эффективность ранних ASDIC снижалась из-за использования глубинная бомба как противолодочное оружие. Это требовало, чтобы атакующее судно прошло над подводным контактом, прежде чем сбросить заряды на корму, что привело к потере контакта ASDIC в моменты, предшествующие атаке. Охотник фактически стрелял вслепую, в это время командир подводной лодки мог уклоняться. Положение было исправлено новой тактикой и новым оружием.
Тактические улучшения, разработанные Фредерик Джон Уокер включил ползучую атаку. Для этого требовалось 2 противолодочных корабля (обычно шлюпы или корветы). «Направляющий корабль» отслеживал подводную лодку-цель на ASDIC с позиции примерно в 1500–2000 ярдов позади нее. Второй корабль с выключенным ASDIC и скоростью 5 узлов начал атаку с позиции между направляющим кораблем и целью. Эта атака контролировалась по радиотелефону с управляющего корабля на основе их ASDIC, а также дальности (дальномером) и пеленга атакующего корабля. Как только глубинные бомбы были выпущены, атакующий корабль на полном ходу покинул непосредственную зону. Направляющий корабль затем вошел в целевой район и также выпустил серию глубинных бомб. Низкая скорость подхода означала, что подводная лодка не могла предсказать, когда будут выпущены глубинные бомбы. Любое действие уклонения было обнаружено управляющим кораблем и отдавалось соответствующее распоряжение атакующему кораблю. Небольшая скорость атаки имела то преимущество, что Немецкая акустическая торпеда был неэффективен против медленного передвижения военного корабля. Вариантом ползучей атаки была «штукатурная» атака, при которой 3 атакующих корабля, работающие в тесном ряду, направлялись над целью руководящим кораблем.[15]
Новым оружием для борьбы с слепым пятном ASDIC было "метательное оружие вперед", такое как Ёжики и позже Кальмары, который проецировал боеголовки на цель впереди атакующего и все еще находился в контакте с ASDIC. Это позволяло единственному эскорту проводить более прицельные атаки на подводные лодки. Развитие событий во время войны привело к появлению британских наборов ASDIC, в которых использовались лучи разных форм, непрерывно перекрывающие слепые зоны. Потом, акустические торпеды были использованы.
В начале Второй мировой войны (сентябрь 1940 г.) британская технология ASDIC была переводится бесплатно В Соединенные Штаты. Исследования ASDIC и подводного звука были расширены в Великобритании и США. Было разработано много новых типов военных устройств обнаружения звука. К ним относятся гидроакустические буи, впервые разработанный британцами в 1944 году под кодовое название Полдник, гидролокатор погружения / погружения и мой гидролокатор обнаружения. Эта работа легла в основу послевоенных разработок, связанных с противодействием атомная подводная лодка.
СОНАР
В течение 30-х годов прошлого века американские инженеры разработали собственную технологию обнаружения звука под водой, и были сделаны важные открытия, такие как существование термоклины и их влияние на звуковые волны.[16] Американцы начали использовать термин СОНАР для своих систем, созданных Фредерик Хант быть эквивалентом РАДАР.[17]
В 1917 году ВМС США впервые приобрели услуги Дж. Уоррена Хортона. В отпуске из Bell Labs, он служил в правительстве в качестве технического эксперта сначала на экспериментальной станции в Нахант, Массачусетс, а затем в штаб-квартире ВМС США, в Лондон, Англия. В Наханте он применил недавно разработанный вакуумная труба, затем связанные с этапами становления прикладной науки, ныне известной как электроника, с обнаружением подводных сигналов. В результате угольный кнопочный микрофон, который использовался в более раннем детекторном оборудовании, был заменен предшественником современного гидрофон. Также в этот период он экспериментировал с методами обнаружения буксировки. Это было связано с повышенной чувствительностью его устройства. Эти принципы до сих пор используются в современных буксируемых гидроакустических системах.
Для удовлетворения оборонных потребностей Великобритании его отправили в Англию для установки в ирландское море нижние гидрофоны, подключенные к береговому посту прослушивания подводным кабелем. Пока это оборудование загружалось на судно-кабелеукладчик, Первая мировая война закончилась, и Хортон вернулся домой.
Во время Второй мировой войны он продолжал разрабатывать гидроакустические системы, которые могли обнаруживать подводные лодки, мины и торпеды. Он опубликовал Основы сонара в 1957 году в качестве главного консультанта по исследованиям в Лаборатории подводных звуков ВМС США. Он занимал эту должность до 1959 года, когда стал техническим директором, и занимал эту должность до обязательного выхода на пенсию в 1963 году.[18][19]
Материалы и дизайн в США и Японии
С 1915 по 1940 год в области гидролокации США был небольшой прогресс. В 1940 году гидролокаторы США обычно состояли из магнитострикционный датчик и массив никелевых трубок, соединенных со стальной пластиной диаметром 1 фут, прикрепленной спиной к спине к Рошель соль кристалл в сферическом корпусе. Эта сборка проникала в корпус корабля и вручную поворачивалась на нужный угол. В пьезоэлектрический Кристалл соли Рошель имел лучшие параметры, но магнитострикционный блок был намного надежнее. Высокие потери торговых судов США в начале Второй мировой войны привели к крупномасштабным высокоприоритетным исследованиям в этой области в США, направленным как на улучшение параметров магнитострикционных преобразователей, так и на надежность Рошельской соли. Дигидрофосфат аммония (АДФ), превосходная альтернатива, была найдена как замена соли Рошель; Первым применением была замена преобразователей соли Рошель на 24 кГц. В течение девяти месяцев соль Рошель устарела. Производственные мощности ADP выросли с нескольких десятков сотрудников в начале 1940 года до нескольких тысяч в 1942 году.
Одним из первых применений кристаллов ADP были гидрофоны для акустические мины; кристаллы были предназначены для низкочастотной отсечки на 5 Гц, выдерживания механических ударов при развертывании с самолетов с высоты 3000 м (10000 футов) и способности выдерживать взрывы соседних мин. Одной из ключевых характеристик надежности ADP является отсутствие старения; кристалл сохраняет свои параметры даже при длительном хранении.
Еще одно применение было для торпед с акустическим самонаведением. На носовой части торпеды устанавливались две пары направленных гидрофонов в горизонтальной и вертикальной плоскостях; разностные сигналы от пар использовались для поворота торпеды влево-вправо и вверх-вниз. Разработана мера противодействия: подводная лодка-цель сбросила шипучий химический, и торпеда пошла за более шумной газированной ловушкой. В качестве контрмеры использовалась торпеда с активным гидролокатором - в носовой части торпеды был добавлен преобразователь, и микрофоны прослушивали его отраженные периодические звуковые волны. Преобразователи представляли собой идентичные прямоугольные кристаллические пластины, расположенные в виде ромбовидных участков в шахматном порядке.
Пассивные гидроакустические системы для подводных лодок были разработаны из кристаллов ADP. Несколько кристаллических сборок были размещены в стальной трубке, заполненной вакуумом касторовое масло, и запечатанный. Затем трубки были установлены параллельно.
Стандартный сканирующий сонар ВМС США в конце Второй мировой войны работал на частоте 18 кГц, используя массив кристаллов ADP. Однако желаемый более длинный диапазон требовал использования более низких частот. Необходимые размеры были слишком велики для кристаллов АДФ, поэтому в начале 1950-х годов магнитострикционные и титанат бария Были разработаны пьезоэлектрические системы, но у них были проблемы с достижением однородных характеристик импеданса, а также страдала диаграмма направленности. Затем титанат бария был заменен более стабильным цирконат титанат свинца (PZT), а частота понижена до 5 кГц. Флот США использовал этот материал в гидролокаторе AN / SQS-23 в течение нескольких десятилетий. В гидролокаторе SQS-23 сначала использовались магнитострикционные никелевые преобразователи, но они весили несколько тонн, а никель был дорогим и считался важным материалом; Поэтому были заменены пьезоэлектрические преобразователи. Гидролокатор представлял собой большой массив из 432 отдельных преобразователей. Сначала датчики были ненадежными, показывали механические и электрические отказы и выходили из строя вскоре после установки; они также были произведены несколькими поставщиками, имели разную конструкцию и их характеристики были достаточно разными, чтобы ухудшить производительность массива. Тогда политика, разрешающая ремонт отдельных преобразователей, была принесена в жертву, и вместо нее была выбрана «одноразовая модульная конструкция» - герметичные неремонтируемые модули, что устранило проблему с уплотнениями и другими посторонними механическими частями.[20]
В Императорский флот Японии в начале Второй мировой войны использовались проекторы на основе кварц. Они были большими и тяжелыми, особенно если они рассчитаны на низкие частоты; один для набора Тип 91, работающий на частоте 9 кГц, имел диаметр 30 дюймов (760 мм) и приводился в действие генератором мощностью 5 кВт и выходной амплитудой 7 кВ. Проекторы Type 93 состояли из твердых кварцевых сэндвичей, собранных в сферические чугун тела. Позднее гидролокаторы Type 93 были заменены на Type 3, разработанные в Германии и использовавшие магнитострикционные проекторы; проекторы состояли из двух идентичных независимых блоков прямоугольной формы в чугунном прямоугольном корпусе размером примерно 16 на 9 дюймов (410 мм × 230 мм). Облученная область составляла половину длины волны в ширину и три длины волны в высоту. Магнитострикционные сердечники изготавливались из штамповки никеля толщиной 4 мм, а позже - из никелевого сплава. железо-алюминиевый сплав с содержанием алюминия от 12,7% до 12,9%. Электропитание подавалось от источника 2 кВт при 3,8 кВ с поляризацией от источника постоянного тока 20 В, 8 А.
Пассивные гидрофоны Императорского флота Японии были основаны на конструкции с подвижной катушкой, пьезоэлектрических преобразователях соляной соли Рошель и углеродные микрофоны.[21]
Более поздние разработки преобразователей
Магнитострикционные преобразователи стали использовать после Второй мировой войны как альтернативу пьезоэлектрическим. Никелевые преобразователи с спиралевидным кольцом использовались для высокопроизводительных низкочастотных операций с размером до 13 футов (4,0 м) в диаметре, вероятно, самые большие отдельные гидролокаторные преобразователи когда-либо. Преимущество металлов заключается в их высокой прочности на разрыв и низком входном электрическом импедансе, но у них есть электрические потери и более низкий коэффициент связи, чем у PZT, прочность на разрыв которого может быть увеличена за счет предварительное напряжение. Были опробованы и другие материалы; неметаллических ферриты были многообещающими из-за их низкой электропроводности, что приводило к низкой вихревой ток убытки, Metglas предлагали высокий коэффициент связи, но в целом уступали PZT. В 1970-х годах соединения редкие земли и железо были обнаружены с превосходными магнитомеханическими свойствами, а именно Терфенол-Д сплав. Это сделало возможными новые конструкции, например гибридный магнитострикционно-пьезоэлектрический преобразователь. Самым последним из этих улучшенных магнитострикционных материалов является Галфенол.
Другие типы преобразователей включают преобразователи с переменным магнитным сопротивлением (или с подвижной арматурой, или с электромагнитными), где магнитная сила действует на поверхности зазоров, и преобразователи с подвижной катушкой (или электродинамические), аналогичные обычным динамикам; последние используются в подводной калибровке звука из-за их очень низких резонансных частот и плоских широкополосных характеристик над ними.[22]
Активный сонар
Активный гидролокатор использует передатчик звука (или проектор) и приемник. Когда двое находятся в одном месте, это моностатический режим. Когда передатчик и приемник разделены, это бистатическая операция.[23] Когда используется больше передатчиков (или больше приемников), снова пространственно разделенных, это мультистатический режим. Большинство сонаров используются моностатически с одним и тем же массивом, который часто используется для передачи и приема.[24] Активные поля гидроакустических буев могут работать в мультистатическом режиме.
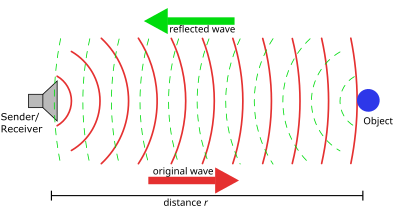
Активный сонар создает пульс звука, часто называемого "пингом", а затем прослушивает размышления (эхо ) пульса. Этот звуковой импульс обычно создается с помощью электроники с помощью сонарного проектора, состоящего из генератора сигналов, усилителя мощности и электроакустического преобразователя / массива.[25] Преобразователь - это устройство, которое может передавать и принимать акустические сигналы («пинги»). Формирователь луча обычно используется для концентрации акустической мощности в луче, который может быть развернут для покрытия требуемых углов поиска. Как правило, электроакустические преобразователи имеют Тонпилз тип и их конструкция могут быть оптимизированы для достижения максимальной эффективности в самой широкой полосе пропускания, чтобы оптимизировать производительность всей системы. Иногда акустический импульс может создаваться другими способами, например химически с использованием взрывчатых веществ, пневматического оружия или плазменных источников звука.
Чтобы измерить расстояние до объекта, время от передачи импульса до приема измеряется и преобразуется в диапазон с использованием известной скорости звука.[26] Чтобы измерить несущий, несколько гидрофоны используются, и набор измеряет относительное время прибытия для каждого или с массивом гидрофонов, измеряя относительную амплитуду в лучах, сформированных в процессе, называемом формирование луча. Использование массива уменьшает пространственный отклик, чтобы обеспечить широкое покрытие многолучевой системы используются. Целевой сигнал (если он присутствует) вместе с шумом затем проходит через различные формы обработка сигналов,[27] что для простых сонаров может быть просто измерением энергии. Затем он представляется некоторой форме устройства принятия решений, которое вызывает на выходе либо требуемый сигнал, либо шум. Этим устройством принятия решения может быть оператор с наушниками или дисплеем, или в более сложных сонарах эта функция может выполняться программным обеспечением. Дальнейшие процессы могут быть выполнены для классификации цели и ее локализации, а также для измерения ее скорости.
Пульс может быть постоянным. частота или щебетать изменения частоты (чтобы сжатие импульса на приеме). Простые сонары обычно используют первый с фильтром, достаточно широким, чтобы перекрыть возможные изменения Доплера из-за движения цели, тогда как более сложные, как правило, включают второй метод. С цифровая обработка стал доступен сжатие импульса обычно реализуется с использованием методов цифровой корреляции. Военные гидролокаторы часто имеют несколько лучей для обеспечения кругового прикрытия, в то время как простые сонары покрывают только узкую дугу, хотя луч может вращаться относительно медленно с помощью механического сканирования.
В частности, когда используются одночастотные передачи, Эффект Допплера может использоваться для измерения радиальной скорости цели. Разница в частоте между переданным и принятым сигналами измеряется и преобразуется в скорость. Поскольку доплеровские сдвиги могут быть вызваны движением приемника или цели, необходимо учитывать радиальную скорость поисковой платформы.
Один полезный небольшой гидролокатор внешне похож на водонепроницаемый фонарик. Голова направляется в воду, нажимается кнопка, и прибор показывает расстояние до цели. Другой вариант - "эхолот ", который показывает небольшой дисплей с косяки рыбы. Некоторые гражданские гидролокаторы (которые не предназначены для скрытности) приближаются к активным военным гидролокаторам по своим возможностям, с трехмерным отображением местности возле лодки.
Когда активный сонар используется для измерения расстояния от преобразователя до дна, он известен как эхо. Аналогичные методы можно использовать для измерения волн, смотря вверх.
Активный гидролокатор также используется для измерения расстояния в воде между двумя преобразователями сонара или комбинацией гидрофона (подводный акустический микрофон) и проектора (подводный акустический динамик). Когда гидрофон / преобразователь получает конкретный сигнал запроса, он отвечает, передавая определенный ответный сигнал. Для измерения расстояния один преобразователь / проектор передает сигнал запроса и измеряет время между этой передачей и получением ответа от другого преобразователя / гидрофона. Разница во времени, измеренная скоростью звука в воде и деленная на два, представляет собой расстояние между двумя платформами. Этот метод, при использовании с несколькими датчиками / гидрофонами / проекторами, может вычислять относительное положение статических и движущихся объектов в воде.
В боевых ситуациях активный импульс может быть обнаружен противником и покажет положение подводной лодки на расстоянии, вдвое превышающем максимальное расстояние, на которое подводная лодка может сама обнаружить контакт, и дать подсказки относительно идентичности подводной лодки на основе характеристик исходящего сигнала. По этим причинам активный гидролокатор не часто используется на военных подводных лодках.
Очень направленный, но малоэффективный гидролокатор (используемый рыбными промыслами, военными и для безопасности портов) использует сложную нелинейную характеристику воды, известную как нелинейный гидролокатор, а виртуальный преобразователь известен как параметрический массив.

Проект Артемида
Проект Артемида был экспериментальным проектом исследования и развития в конце 1950-х - середине 1960-х годов для изучения распространения звука и обработки сигналов для низкочастотной активной гидролокационной системы, которая могла бы использоваться для наблюдения за океаном. Второстепенной задачей было изучение технических проблем стационарных систем активного днища.[28] Приемная установка располагалась на склоне банка Плантагнет у Бермудских островов. Активный исходный массив был развернут с переоборудованного танкера времен Второй мировой войны. USNSМиссия Капистрано.[29] Элементы Artemis были использованы экспериментально после завершения основного эксперимента.
Транспондер
Это активный гидролокатор, который получает конкретный стимул и немедленно (или с задержкой) ретранслирует принятый или заранее определенный сигнал. Транспондеры могут использоваться для удаленной активации или восстановления подводного оборудования.[30]
Прогноз производительности
Цель сонара мала по сравнению с сфера, с центром вокруг эмиттера, на котором он расположен. Поэтому мощность отраженного сигнала очень мала, несколько порядки величины меньше исходного сигнала. Даже если отраженный сигнал был той же мощности, следующий пример (с использованием гипотетических значений) показывает проблему: Предположим, что гидролокатор может излучать мощность 10 000 Вт / м2 сигнал на расстоянии 1 м и обнаружение 0,001 Вт / м2 сигнал. На 100 м сигнал будет 1 Вт / м2 (из-за закон обратных квадратов ). Если весь сигнал отражается от 10 м2 цель, она будет на уровне 0,001 Вт / м2 когда он достигает излучателя, то есть просто обнаруживается. Однако исходный сигнал останется выше 0,001 Вт / м.2 до 3000 м. Любые 10 м2 цель на расстоянии от 100 до 3000 м, использующая аналогичную или лучшую систему, сможет обнаружить импульс, но не будет обнаружена излучателем. Детекторы должны быть очень чувствительными, чтобы улавливать эхо. Поскольку исходный сигнал намного мощнее, он может быть обнаружен во много раз дальше, чем удвоенная дальность действия сонара (как в примере).
У активного сонара есть два ограничения производительности: из-за шума и реверберации. В общем, один или другой из них будет доминировать, так что два эффекта можно изначально рассматривать отдельно.
В условиях ограниченного шума при первоначальном обнаружении:[31]
- SL - 2PL + TS - (NL - AG) = DT,
где SL - исходный уровень, PL - потеря распространения (иногда называют потеря передачи ), TS - сила цели, NL - уровень шума, AG - это усиление массива принимающего массива (иногда аппроксимируется его индексом направленности), а DT - это порог обнаружения.
В условиях ограниченной реверберации при первоначальном обнаружении (без учета усиления массива):
- SL - 2PL + TS = RL + DT,
где RL - уровень реверберации, а остальные факторы остались прежними.
Ручной гидролокатор для дайвера
- LIMIS (гидролокатор для визуализации миниатюрных мин) - это переносной или ROV -монтированный гидролокатор для использования водолазом. Название свое потому, что он был разработан для патрульных водолазов (боевой пловцы или же дайверы ) искать мины в малом видимость воды.
- LUIS (линзирующая система подводной съемки) - еще один гидролокатор для использования дайвером.
- Существовал или был небольшой ручной гидролокатор в форме фонарика для дайверов, который просто отображает расстояние.
- Для INSS (интегрированная навигационная гидроакустическая система)
Гидролокатор, направленный вверх
Гидролокатор, направленный вверх (ULS), представляет собой устройство гидролокатора, направленное вверх и смотрящее на поверхность моря.Он используется для тех же целей, что и гидролокатор, смотрящий вниз, но имеет некоторые уникальные применения, такие как измерение морской лед толщина, шероховатость и концентрация,[32][33] или измерения уноса воздуха из пузырьковых шлейфов во время бурного моря. Часто он пришвартовывается на дне океана или плавает на натянутом тросе, пришвартовавшись на постоянной глубине, возможно, 100 м. Они также могут использоваться подводные лодки, АНПА, и поплавки, такие как Арго плавать.[34]
Пассивный сонар
Пассивный сонар слушает без передачи. Он часто используется в военных целях, хотя он также используется в научных приложениях, например, обнаружение рыбы для исследования присутствия / отсутствия в различных водных средах - см. также пассивная акустика и пассивный радар. В самом широком смысле этот термин может охватывать практически любой аналитический метод, включающий удаленно генерируемый звук, хотя обычно он ограничивается методами, применяемыми в водной среде.
Определение источников звука
Пассивный гидролокатор имеет широкий спектр методов для определения источника обнаруженного звука. Например, суда США обычно работают 60 Гц переменный ток энергосистемы. Если трансформаторы или же генераторы монтируются без надлежащего вибрация изоляция от корпус или затопление, звук 60 Гц от обмоток может исходить от подводная лодка или корабль. Это может помочь определить его национальность, поскольку все европейские подводные лодки и почти все другие страны имеют системы питания с частотой 50 Гц. Прерывистые источники звука (например, гаечный ключ падение), называемые «переходными процессами», также могут быть обнаружены пассивным сонаром. До недавнего времени[когда? ] опытный, обученный оператор идентифицировал сигналы, но теперь компьютеры могут это делать.
Пассивные гидролокаторы могут иметь большие звуковые базы данных, но оператор гидролокатора обычно классифицирует сигналы вручную. А компьютерная система часто использует эти базы данных для определения классов кораблей, действий (то есть скорости корабля или типа выпущенного оружия) и даже конкретных кораблей.
Ограничения по шуму
Пассивный сонар на транспортных средствах обычно сильно ограничен из-за шума, создаваемого транспортным средством. По этой причине многие подводные лодки работают ядерные реакторы которые можно охлаждать без насосов, используя бесшумный конвекция, или же топливные элементы или же батареи, который также может работать беззвучно. Транспортные средства пропеллеры также сконструированы и обработаны с минимальным уровнем шума. Быстроходные винты часто создают в воде крошечные пузырьки, и это кавитация имеет отчетливый звук.
Сонар гидрофоны может буксироваться за судном или подводной лодкой, чтобы уменьшить влияние шума, создаваемого самим плавсредством. Буксируемые подразделения также борются с термоклин, поскольку агрегат можно буксировать выше или ниже термоклина.
Отображение большинства пассивных сонаров раньше было двухмерным. отображение водопада. Горизонтальное направление дисплея - азимут. Вертикаль - это частота, а иногда и время. Другой способ отображения - это цветовая кодировка частотно-временной информации для пеленга. Более свежие дисплеи генерируются компьютерами и имитируют радар -тип индикатор положения плана отображает.
Прогноз производительности
В отличие от активного сонара, используется только одностороннее распространение. Из-за различной обработки сигналов минимальное обнаруживаемое отношение сигнал / шум будет другим. Уравнение для определения характеристик пассивного сонара:[35][31]
- SL - PL = NL - AG + DT,
где SL - уровень источника, PL - потери при распространении, NL - уровень шума, AG - усиление решетки, а DT - порог обнаружения. В добродетель пассивного сонара
- ФОМ = SL + AG - (NL + DT).
Факторы производительности
Характеристики гидролокатора по обнаружению, классификации и локализации зависят от окружающей среды и приемного оборудования, а также от передающего оборудования в активном гидролокаторе или шума, излучаемого целью в пассивном гидролокаторе.
Распространение звука
На работу сонара влияют изменения в скорость звука, особенно в вертикальной плоскости. Звук распространяется медленнее пресная вода чем в морская вода, правда разница небольшая. Скорость определяется водным объемный модуль и масса плотность. Объемный модуль упругости зависит от температуры, растворенных примесей (обычно соленость ), и давление. Эффект плотности невелик. В скорость звука (в футах в секунду) составляет примерно:
- 4388 + (11,25 × температура (в ° F)) + (0,0182 × глубина (в футах)) + соленость (в частях на тысячу).
Этот эмпирически полученное приближенное уравнение достаточно точно для нормальных температур, концентраций солености и диапазона глубин большинства океанов. Температура океана меняется с глубиной, но на глубине от 30 до 100 метров часто наблюдается заметное изменение, называемое термоклин, отделяя более теплые поверхностные воды от холодных, неподвижных вод, составляющих остальную часть океана. Это может нарушить работу сонара, поскольку звук, исходящий с одной стороны от термоклина, имеет тенденцию к изгибу или преломленный, через термоклин. Термоклин может присутствовать в более мелководных прибрежных водах. Однако воздействие волн часто приводит к перемешиванию водяного столба и устранению термоклина. Вода давление также влияет на распространение звука: более высокое давление увеличивает скорость звука, в результате чего звуковые волны преломляются от области с более высокой скоростью звука. Математическая модель рефракции называется Закон Снеллиуса.
Если источник звука расположен на большой глубине и в подходящих условиях, распространение звука может произойти вканал глубокого звука '. Это обеспечивает чрезвычайно низкие потери при распространении для приемника в канале. Это связано с захватом звука в канале без потерь на границах. Подобное распространение может происходить в «поверхностном канале» при подходящих условиях. Однако в этом случае возникают потери на отражение от поверхности.
На мелководье распространение обычно происходит за счет многократного отражения от поверхности и дна, где могут возникать значительные потери.
На распространение звука влияет поглощение в самой воде, а также на поверхности и дне. Это поглощение зависит от частоты с несколькими различными механизмами в морской воде. Сонар дальнего действия использует низкие частоты для минимизации эффектов поглощения.
Море содержит множество источников шума, которые мешают желаемому эхо-сигналу или сигнатуре цели. Основные источники шума: волны и перевозки. Движение приемника по воде также может вызывать зависящий от скорости низкочастотный шум.
Рассеяние
Когда используется активный сонар, рассеяние происходит от мелких предметов в море, а также от дна и поверхности. Это может быть основным источником помех. Это акустическое рассеяние аналогично рассеянию света от фар автомобиля в тумане: карандашный луч высокой интенсивности в некоторой степени проникает в туман, но фары с более широким светом излучают много света в нежелательных направлениях, большая часть которого рассеивается назад. к наблюдателю, подавляющее отраженное от цели («белое пятно»). По аналогичным причинам активный гидролокатор должен передавать узкий луч, чтобы минимизировать рассеяние.

Рассеяние сонара от объектов (шахт, трубопроводов, зоопланктона, геологических объектов, рыбы и т. Д.) - это то, как активный сонар обнаруживает их, но эта способность может быть замаскирована сильным рассеянием от ложных целей или «помехами». Где они возникают (под прибойными волнами;[37] в следах корабля; в газе, выходящем из просачиваний и утечек с морского дна[38] и т. д.), пузырьки газа являются мощными источниками беспорядка и могут легко скрыть цели. TWIPS (двойной перевернутый импульсный сонар)[39][40][41] в настоящее время является единственным гидролокатором, который может решить эту проблему с помехами.

Это важно, так как в последнее время в прибрежных водах произошло много конфликтов, и невозможность определить, присутствуют ли мины или нет, представляют опасность и задержки для военных судов, а также для помощи конвоям и торговым судам, пытающимся поддержать регион в течение долгого времени после того, как конфликт закончился. прекратился.[39]
Целевые характеристики
Звук отражение характеристики цели активного гидролокатора, например подводной лодки, известны как ее сила цели. Сложность заключается в том, что эхо также получается от других объектов в море, таких как киты, следы, косяки рыб и камни.
Пассивный гидролокатор обнаруживает цель излученный шумовые характеристики. Излученный спектр включает в себя непрерывный спектр шума с пиками на определенных частотах, которые можно использовать для классификации.
Контрмеры
Активный Подводная лодка, находящаяся под атакой, может применять (силовые) контрмеры для повышения уровня шума, создания большой ложной цели и затемнения сигнатуры самой подводной лодки.
Пассивный Контрмеры (т. е. без источника питания) включают:
- Установка шумогенераторов на изолирующие устройства.
- Звукопоглощающие покрытия на корпусах подводных лодок, например безэховая плитка.
Военное применение
Современное морская война широко использует как пассивный, так и активный гидролокатор с водных судов, самолетов и стационарных установок. Хотя активный гидролокатор использовался надводными кораблями в Вторая Мировая Война подводные лодки избегали использования активного гидролокатора из-за возможности раскрытия их присутствия и местоположения войскам противника. Однако появление современной обработки сигналов позволило использовать пассивный гидролокатор в качестве основного средства для операций поиска и обнаружения. В 1987 году подразделение японской компании Toshiba по сообщениям[42] продал технику Советский союз Это позволило фрезеровать лопасти гребных винтов их подводных лодок, чтобы они стали радикально тише, что затрудняло обнаружение подводных лодок нового поколения.
Использование подводной лодки активного гидролокатора для определения пеленга крайне редко и не обязательно дает высококачественную информацию о пеленге или дальности для группы управления огнем подводных лодок. Однако использование активного гидролокатора на надводных кораблях очень распространено и используется на подводных лодках, когда тактическая ситуация диктует, что более важно определить позицию вражеской подводной лодки, чем скрыть свою позицию. Что касается надводных кораблей, можно предположить, что угроза уже отслеживает судно с помощью спутниковых данных, поскольку любое судно вокруг излучающего гидролокатора обнаружит излучение. Услышав сигнал, легко определить используемое гидроакустическое оборудование (обычно по его частоте) и его положение (по энергии звуковой волны). Активный гидролокатор похож на радар в том, что, хотя он позволяет обнаруживать цели на определенном расстоянии, он также позволяет обнаруживать излучатель на гораздо большем расстоянии, что нежелательно.
Поскольку активный гидролокатор обнаруживает присутствие и положение оператора и не позволяет точно классифицировать цели, он используется на быстрых (самолеты, вертолеты) и на шумных платформах (большинство надводных кораблей), но редко на подводных лодках. Когда активный гидролокатор используется надводными кораблями или подводными лодками, он обычно активируется очень кратковременно с перерывами, чтобы минимизировать риск обнаружения. Следовательно, активный сонар обычно считается резервным по сравнению с пассивным гидролокатором. В самолетах активный гидролокатор используется в виде одноразового гидроакустические буи сбрасываемые в зоне патрулирования самолета или вблизи возможных контактов с гидролокатором противника.
Пассивный гидролокатор имеет несколько преимуществ, самое главное - бесшумный. Если уровень шума, излучаемого целью, достаточно высок, он может иметь большую дальность действия, чем активный сонар, и позволяет идентифицировать цель. Поскольку любой моторизованный объект издает некоторый шум, его в принципе можно обнаружить, в зависимости от уровня излучаемого шума и уровень окружающего шума в районе, а также используемые технологии. Для упрощения пассивный гидролокатор "видит" вокруг корабля, используя его. На подводной лодке пассивный гидролокатор, установленный в носовой части, обнаруживает в направлении около 270 ° с центром на выравнивании корабля, корпусную группу с углом около 160 ° с каждой стороны и буксируемую группу с полным углом обзора 360 °. Невидимые области возникают из-за вмешательства самого корабля. Как только сигнал обнаружен в определенном направлении (что означает, что что-то издает звук в этом направлении, это называется широкополосным обнаружением), можно увеличить масштаб и проанализировать полученный сигнал (узкополосный анализ). Обычно это делается с помощью преобразование Фурье чтобы показать различные частоты, составляющие звук. Поскольку каждый двигатель издает определенный звук, идентифицировать объект несложно. Базы данных уникальных звуков двигателя являются частью того, что известно как акустический интеллект или ACINT.
Еще одно применение пассивного сонара - определение дальности цели. траектория. Этот процесс называется анализом движения цели (TMA), и результирующим «решением» является дальность, курс и скорость цели. ТМА выполняется путем отметки направления, с которого в разное время идет звук, и сравнения движения с движением собственного корабля оператора. Изменения относительного движения анализируются с использованием стандартных геометрических методов наряду с некоторыми предположениями о предельных случаях.
Пассивный сонар незаметен и очень полезен. Однако это требует высокие технологии электронные компоненты и стоит дорого. Обычно он используется на дорогих кораблях в виде массивов для улучшения обнаружения. Надводные корабли используют это хорошо; это даже лучше используется подводные лодки, и он также используется самолетами и вертолетами, в основном для «эффекта неожиданности», поскольку подводные лодки могут прятаться под тепловыми слоями. Если командир подводной лодки считает, что он один, он может подвести лодку ближе к поверхности и ее будет легче обнаружить, или же будет идти глубже и быстрее и, таким образом, издать больше шума.
Примеры использования гидролокаторов в военных целях приведены ниже. Многие из гражданских применений, перечисленных в следующем разделе, также могут быть применимы к военно-морскому использованию.
Противолодочная война

До недавнего времени судовые гидролокаторы обычно оснащались решетками, установленными на корпусе судна либо на миде, либо на носу. Вскоре после их первоначального использования было обнаружено, что необходимы средства уменьшения шума потока. Первые изготавливались из холста на каркасе, затем применялись стальные. Сейчас купола обычно делают из армированного пластика или герметичной резины. Такие гидролокаторы в основном активны в эксплуатации. Примером обычного гидролокатора, установленного на корпусе, является SQS-56.
Из-за шума судов также используются буксируемые гидролокаторы. Они также имеют то преимущество, что их можно поместить глубже в воду. Однако существуют ограничения на их использование на мелководье. Они называются буксируемыми массивами (линейными) или сонарами переменной глубины (VDS) с 2 / 3D массивами. Проблема в том, что лебедки, необходимые для их развертывания / восстановления, большие и дорогие. Наборы VDS в основном активны в работе, а буксируемые массивы пассивны.
Примером современного активно-пассивного судового буксируемого гидролокатора является Сонар 2087 сделан Подводные системы Thales.
Торпеды
Современные торпеды обычно оснащены активным / пассивным гидролокатором. Это можно использовать для попадания прямо в цель, но пробуждение самонаведения также используются торпеды. Ранним примером акустического гомера был Марк 37 торпеда.
Противодействие торпедам может быть буксируемым или бесплатным. Ранним примером был немецкий Зиглинде устройство в то время как Смелый был химическим устройством. Широко используемым в США устройством был буксируемый AN / SLQ-25 Nixie в то время как симулятор мобильной подводной лодки (MOSS) был бесплатным устройством. Современная альтернатива системе Nixie - это Надводный корабль ВМС Великобритании S2170 Торпедная защита система.
Мины
Мины могут быть оснащены гидролокатором для обнаружения, локализации и распознавания необходимой цели. Примером может служить CAPTOR шахта.
Противоминные меры
Гидролокатор противоминной защиты (MCM), иногда называемый «гидролокатором для предотвращения мин и препятствий (MOAS)», представляет собой специальный тип гидролокатора, используемый для обнаружения небольших объектов. Большинство гидролокаторов MCM устанавливаются на корпусе, но некоторые из них имеют конструкцию VDS. Примером установленного на корпусе гидролокатора MCM является тип 2193, в то время как гидролокатор для добычи мин SQQ-32 и системы типа 2093 являются конструкциями VDS.
Подводные лодки в большей степени полагаются на гидролокаторы, чем надводные корабли, поскольку они не могут использовать радар на глубине. Гидролокаторы могут быть смонтированы на корпусе или буксируемы. Информация о типовых посадках дана в Оясиоподводная лодка класса и Swiftsureподводная лодка класса.
Самолет

Вертолеты могут использоваться для борьбы с подводными лодками путем развертывания полей активно-пассивных гидроакустических буев или могут работать с гидролокаторами погружения, такими как AQS-13. Самолеты с неподвижным крылом также могут развертывать гидроакустические буи и обладают большей выносливостью и возможностями для их развертывания. Обработка с гидроакустических буев или погружающийся гидролокатор может быть в самолете или на корабле. Преимущество погружающегося сонара в том, что он может быть развернут на глубину, соответствующую ежедневным условиям. Вертолеты также использовались для противоминных операций с использованием буксируемых гидролокаторов, таких как AQS-20A.
Подводные коммуникации
Специальные гидролокаторы могут быть установлены на кораблях и подводных лодках для подводной связи.
Наблюдение за океаном
Соединенные Штаты начали систему пассивных стационарных систем наблюдения за океаном в 1950 году под секретным названием Система звукового наблюдения (СОСУС) с Американская телефонно-телеграфная компания (AT&T), с его Bell Laboratories исследования и Western Electric с производственными предприятиями заключаются контракты на разработку и установку. Системы использовали канал глубокого звука (SOFAR) и были основаны на звуковом спектрографе AT&T, который преобразовывал звук в визуальное изображение. спектрограмма представляющий частотно-временной анализ звука, который был разработан для анализа речи и модифицирован для анализа низкочастотных подводных звуков. Этот процесс был Низкочастотный анализ и запись и оборудование было названо Low Frequency Analyzer and Recorder, оба с аббревиатурой LOFAR. Исследование LOFAR было названо Иезавель и привели к использованию в воздушных и надводных системах, особенно в гидроакустических снарядах, использующих этот процесс, а иногда и с использованием слова «Иезавель» в своем названии.[43][44][45] Предлагаемая система предлагала такую перспективу обнаружения подводных лодок на большом расстоянии, что ВМФ приказал немедленно приступить к реализации.[44][46]

В период между установкой испытательной группы, за которой последовала полномасштабная, из сорока элементов, прототип эксплуатационной группы в 1951 и 1958 годах, системы были установлены в Атлантике, а затем в Тихом океане под несекретным названием. Проект Цезарь. Первоначальные системы были отключены на засекреченных береговых станциях, обозначенных как военно-морские объекты (NAVFAC), которые, как объяснили, участвовали в «океанских исследованиях» для прикрытия своей секретной миссии. Система была модернизирована несколько раз более совершенным кабелем, позволяющим устанавливать массивы в океанских бассейнах и улучшать обработку. Береговые станции были ликвидированы в процессе консолидации и перенаправления массивов в центральные обрабатывающие центры в 1990-е годы. В 1985 году, когда начали работать новые мобильные массивы и другие системы, коллективное название системы было изменено на Integrated Undersea Surveillance System (IUSS). В 1991 году миссия системы была рассекречена. За год до этого было разрешено носить знаки отличия IUSS. Был предоставлен доступ к некоторым системам для научных исследований.[43][44]
Считается, что подобная система действовала в Советском Союзе.
Подводная безопасность
Сонар может использоваться для обнаружения пловцы и другие аквалангисты. Это может быть применимо вокруг кораблей или на входе в порты. Активный гидролокатор также может использоваться как средство сдерживания и / или отключения. Одним из таких устройств является Цербер система.
Ручной гидролокатор

Гидролокатор обнаружения мин Limpet (LIMIS) - это портативный или ROV -монтированный гидролокатор для патрульных водолазов (боевой пловцы или же дайверы ) искать мины в малом видимость воды.
LUIS - это еще один гидролокатор для визуализации, который может использовать дайвер.
Интегрированная навигационная гидролокаторная система (INSS) - это небольшой портативный гидролокатор в форме фонарика для дайверов, который отображает расстояние.[47][48]
Гидролокатор перехвата
Это гидролокатор, предназначенный для обнаружения и определения местоположения передач от враждебных активных гидролокаторов. Примером этого является Тип 2082, установленный на британском Авангардподводные лодки класса.
Гражданские приложения
Рыболовство
Ловит рыбу - важная отрасль, спрос на которую растет, но мировой тоннаж улова падает в результате серьезных проблем с ресурсами. Перед отраслью стоит будущее продолжения всемирной консолидации до точки устойчивость может быть достигнуто. Тем не менее, консолидация рыболовных флотилий вызывает повышенный спрос на сложную электронику для поиска рыбы, такую как датчики, эхолоты и сонары. Исторически сложилось так, что рыбаки использовали множество различных методов для поиска и ловли рыбы. Однако акустические технологии были одной из важнейших движущих сил развития современного коммерческого рыболовства.
Звуковые волны проходят через рыбу иначе, чем через воду, потому что рыба наполнена воздухом. плавательный пузырь имеет другую плотность, чем морская вода. Эта разница в плотности позволяет обнаруживать косяки рыб по отраженному звуку. Акустическая технология особенно хорошо подходит для подводных применений, поскольку звук распространяется под водой дальше и быстрее, чем в воздухе. Сегодня коммерческие рыболовные суда почти полностью полагаются на акустический сонар и эхолоты для обнаружения рыбы.Рыбаки также используют активные гидролокаторы и эхолоты для определения глубины воды, контура дна и состава дна.

Такие компании, как eSonar, Raymarine, Marport Canada, Wesmar, Furuno, Krupp и Simrad производят различные гидролокаторы и акустические инструменты для глубокое море промышленное рыболовство. Например, сетевые датчики выполняют различные подводные измерения и передают информацию обратно на приемник на борту судна. Каждый датчик оснащен одним или несколькими акустическими преобразователями в зависимости от его конкретной функции. Данные передаются с датчиков с помощью беспроводной акустической телеметрии и принимаются гидрофоном, установленным на корпусе. В аналоговые сигналы декодируются и преобразуются цифровым акустическим приемником в данные, которые передаются на мостовой компьютер для графический дисплей на мониторе с высоким разрешением.
Эхо
Эхо-зондирование - это процесс, используемый для определения глубины воды под кораблями и лодками. Тип активного сонара, эхолокация - это передача акустического импульса прямо вниз на морское дно, измерение времени между передачей и возвратом эхо-сигнала после того, как он достиг дна и отскочил обратно к своему исходному кораблю. Акустический импульс излучается преобразователем, который также принимает отраженное эхо. Измерение глубины рассчитывается путем умножения скорости звука в воде (в среднем 1500 метров в секунду) на время между излучением и отражением эха.[49][50]
Значение подводной акустики для рыбной промышленности привело к разработке других акустических инструментов, которые работают аналогично эхолотам, но, поскольку их функция немного отличается от исходной модели эхолота, получили другие термины.
Чистое местоположение
Сетевой эхолот - это эхолот с датчиком, установленным на заголовке сети, а не на дне судна. Тем не менее, чтобы приспособить расстояние от преобразователя до блока дисплея, которое намного больше, чем у обычного эхолота, необходимо сделать несколько уточнений. Доступны два основных типа. Первый - это тип кабеля, в котором сигналы передаются по кабелю. В этом случае должен быть предусмотрен кабельный барабан, на котором можно тянуть, стрелять и укладывать кабель на различных этапах работы. Второй тип - это бескабельный эхолот, такой как Trawl Explorer от Marport, в котором сигналы передаются акустически между сетью и установленным на корпусе приемником-гидрофоном на судне. В этом случае не требуется кабельный барабан, но требуется сложная электроника на датчике и приемнике.
Дисплей на сетевом эхолоте показывает расстояние сети от дна (или поверхности), а не глубину воды, как в случае с эхолотом, установленным на корпусе. преобразователь. Прикрепленный к заголовку сети, обычно можно увидеть подножку, которая указывает на эффективность сети. Также можно увидеть любую рыбу, попадающую в сеть, что позволяет произвести точную настройку, чтобы поймать как можно больше рыбы. В других промыслах, где важно количество рыбы в сети, датчики улова устанавливаются в различных местах на конце сети для трески. Когда конец трески заполняется, эти датчики датчика улова срабатывают один за другим, и эта информация акустически передается на мониторы на мостике судна. Затем капитан может решить, когда тянуть сеть.
Современные версии эхолота, использующего несколько преобразователей, работают больше как эхолот, чем эхолот, и показывают срезы области перед сетью, а не только вертикальный вид, который использовался в первоначальных эхолотах.
Гидролокатор - это эхолот с возможностью определения направления, который может отображать рыбу или другие объекты вокруг судна.
ROV и UUV
Небольшие гидролокаторы были установлены на дистанционно управляемые аппараты (ROV) и беспилотные подводные аппараты (UUV), чтобы они могли работать в темных условиях. Эти сонары используются для наблюдения за автомобилем. В Система долгосрочной разведки шахт является UUV для целей MCM.
Местоположение автомобиля
Гидролокаторы, которые действуют как маяки, устанавливаются на самолетах для определения их местоположения в случае крушения в море. Гидролокаторы с короткой и длинной базой могут использоваться для определения местоположения, например, LBL.
Протез для слабовидящих
В 2013 году изобретатель из США представил боди «паучье чутье», оснащенное ультразвуковые датчики и тактильная обратная связь системы, предупреждающие пользователя о входящих угрозах; позволяя им реагировать на нападавших даже с завязанными глазами.[51]
Научные приложения
Оценка биомассы
Обнаружение рыб и других морских и водных организмов и оценка их индивидуальных размеров или общей биомассы с использованием активных методов сонара. Когда звуковой импульс проходит через воду, он сталкивается с объектами, плотность или акустические характеристики которых отличаются от окружающей среды, например, рыбы, которые отражают звук обратно к источнику звука. Эти эхо-сигналы предоставляют информацию о размере, местонахождении, численности и поведении рыбы. Данные обычно обрабатываются и анализируются с использованием различных программ, таких как Echoview.
Измерение волн
Направленный вверх эхолот, установленный на дне или на платформе, может использоваться для измерения высоты и периода волны. На основе этой статистики можно определить состояние поверхности в определенном месте.
Измерение скорости воды
Для измерения скорости воды были разработаны специальные гидролокаторы ближнего действия.
Оценка нижнего типа
Были разработаны гидролокаторы, которые можно использовать для определения характеристик морского дна, например, на ил, песок и гравий. Относительно простые гидролокаторы, такие как эхолоты, могут быть переведены в системы классификации морского дна с помощью дополнительных модулей, преобразующих параметры эхолокации в тип отложений. Существуют разные алгоритмы, но все они основаны на изменении энергии или формы отраженных сигналов эхолота. Расширенный анализ классификации субстратов может быть выполнен с использованием калиброванных (научных) эхолотов и параметрического или нечетко-логического анализа акустических данных.
Батиметрическое отображение

Гидролокаторы бокового обзора может использоваться для составления карт топографии морского дна (батиметрия ), перемещая гидролокатор по нему чуть выше дна. Низкочастотные сонары, такие как ГЛОРИЯ использовались для обследований континентального шельфа, в то время как высокочастотные гидролокаторы используются для более детальных съемок небольших территорий.
Поддонное профилирование
Для получения профилей верхних слоев дна океана были разработаны мощные низкочастотные эхолоты.
Обнаружение утечки газа с морского дна
Пузырьки газа могут вытекать с морского дна или вблизи него из нескольких источников. Их можно обнаружить как пассивными[52] и активный гидролокатор[38] (показано на схематическом рисунке[52] желтой и красной системами соответственно).

Происходит естественная утечка метана и углекислого газа.[38] Газопроводы могут протекать, и важно иметь возможность определить, происходит ли утечка из объектов улавливания и хранения углерода (CCSF; например, истощенные нефтяные скважины, в которых хранится извлеченный атмосферный углерод).[53][54][55][56] Количественная оценка количества утечки газа затруднена, и хотя оценки могут быть сделаны с использованием активного и пассивного сонара, важно подвергнуть сомнению их точность из-за допущений, присущих таким оценкам на основе данных гидролокатора.[52][57]
Эхолот с синтетической апертурой
В лаборатории были созданы различные гидролокаторы с синтетической апертурой, и некоторые из них уже используются в системах поиска мин и поиске. Объяснение их работы дано в гидролокатор с синтетической апертурой.
Параметрический сонар
Параметрические источники используют нелинейность воды для создания разности частот между двумя высокими частотами. Формируется виртуальный массив конечных огней. Такой проектор обладает такими преимуществами, как широкая полоса пропускания, узкий луч, а при полной разработке и тщательном измерении у него нет явных боковых лепестков: Параметрический массив. Его главный недостаток - очень низкий КПД всего несколько процентов.[58] П.Дж. Вестервельт резюмирует соответствующие тенденции.[59]
Сонар во внеземных условиях
Было предложено использовать как пассивный, так и активный сонар для различных внеземных целей.[60] Пример использования активного сонара - определение глубины углеводородных морей на Титан,[61] Пример использования пассивного гидролокатора - обнаружение метана на Титане,[62]
Было отмечено, что те предложения, которые предполагают использование гидролокатора без должного учета разницы между земной (атмосфера, океан, минералы) средой и внеземной средой, могут привести к ошибочным значениям.[63][64][65][66][67][68]
Влияние гидролокатора на морскую жизнь
Влияние на морских млекопитающих

Исследования показали, что использование активного сонара может привести к массовым выбросам на берег морские млекопитающие.[69] Клювые киты, наиболее частая жертва посадки на мель, показала высокую чувствительность к среднечастотному активному сонару.[70] Другие морские млекопитающие, такие как синий кит также убежать от источника сонара,[71] в то время как военно-морская деятельность считалась наиболее вероятной причиной массового высадки дельфинов на берег.[72] ВМС США, которые частично финансировали некоторые исследования, заявили, что результаты показали только поведенческие реакции на сонар, а не фактический вред, но они «будут оценивать эффективность [своих] мер защиты морских млекопитающих в свете новых результатов исследований». .[69] В постановлении Верховного суда США от 2008 года об использовании гидролокатора ВМС США отмечалось, что не было случаев, когда было бы убедительно доказано, что сонар нанес вред или убил морское млекопитающее.[73]
Некоторые морские животные, такие как киты и дельфины, использовать эхолокация системы, иногда называемые биосонар для обнаружения хищников и добычи. Исследование влияния сонара на Голубые киты в Южная Калифорния Байт показывает, что использование среднечастотного сонара нарушает пищевое поведение китов. Это указывает на то, что вызванное гидролокатором нарушение кормления и вытеснение из высококачественных участков добычи может иметь значительные и ранее недокументированные воздействия на усатый кит кормовая экология, особь фитнес и здоровье населения.[74]
Обзор данных о массовых высадках клювовидных китов, связанных с военно-морскими учениями, в которых использовался гидролокатор, был опубликован в 2019 году. В нем сделан вывод о том, что воздействие среднечастотного активного гидролокатора сильнее всего на клювовидных китов Кювье, но различается для разных людей или популяций. Обзор показал, что сила реакции отдельных животных может зависеть от того, подвергались ли они ранее воздействию сонара, и что симптомы декомпрессионная болезнь были обнаружены у выброшенных на мель китов, что может быть результатом такой реакции на сонар. Он отметил, что на Канарских островах, где ранее сообщалось о нескольких высадках на берег, больше не происходило массовых высадок после того, как в этом районе были запрещены военно-морские учения с использованием гидролокатора, и рекомендовал распространить запрет на другие районы, где продолжаются массовые высадки на берег происходить.[75][76]
Влияние на рыбу
Звуки сонара высокой интенсивности могут создать небольшой временное смещение порога слышимости немного рыбы.[77][78][а]
Частоты и разрешения
Частоты гидролокаторов варьируются от инфразвуковых до мегагерц. Как правило, более низкие частоты имеют больший диапазон, а более высокие частоты обеспечивают лучшее разрешение и меньший размер для данной направленности.
Для достижения разумной направленности частоты ниже 1 кГц обычно требуют большого размера, обычно достигаемого в виде буксируемых решеток.[79]
Низкочастотные гидролокаторы в общих чертах определяют как 1–5 кГц, хотя некоторые военно-морские силы рассматривают 5–7 кГц также как низкую частоту. Средняя частота определяется как 5–15 кГц. Другой стиль разделения предполагает, что низкая частота составляет менее 1 кГц, а средняя частота - от 1 до 10 кГц.[79]
Американские гидролокаторы времен Второй мировой войны работали на относительно высокой частоте 20–30 кГц для достижения направленности с помощью относительно небольших датчиков, с типичным максимальным рабочим диапазоном 2500 ярдов. Послевоенные гидролокаторы использовали более низкие частоты для увеличения дальности; например SQS-4 работал на частоте 10 кГц с дальностью до 5000 ярдов. SQS-26 и SQS-53 работали на частоте 3 кГц с дальностью до 20 000 ярдов; их купола имели размер ок. 60-футовый катер для персонала, максимальный размер для обычных гидролокаторов корпуса. Достижение больших размеров с помощью конформной группы гидролокаторов, распределенных по корпусу, до сих пор не было эффективным, поэтому для более низких частот используются линейные или буксируемые группы.[79]
Японские гидролокаторы времен Второй мировой войны работали в широком диапазоне частот. Тип 91 с 30-дюймовым кварцевым проектором работал на частоте 9 кГц. Тип 93 с кварцевыми проекторами меньшего размера работал на частоте 17,5 кГц (модель 5 при магнитострикции 16 или 19 кГц) при мощности от 1,7 до 2,5 киловатт с дальностью действия до 6 км. Более поздний тип 3 с магнитострикционными преобразователями немецкой конструкции работал на частотах 13, 14,5, 16 или 20 кГц (в зависимости от модели), используя сдвоенные преобразователи (за исключением модели 1, у которой было три одиночных), мощностью от 0,2 до 2,5 киловатт. В простом типе использовались магнитострикционные преобразователи на 14,5 кГц на 0,25 кВт, управляемые емкостным разрядом вместо генераторов, с дальностью действия до 2,5 км.[21]
Разрешающая способность сонара угловая; объекты, расположенные дальше друг от друга, отображаются с более низким разрешением, чем ближайшие.
Другой источник перечисляет диапазоны и разрешения по сравнению с частотами для гидролокаторов бокового обзора. 30 кГц обеспечивает низкое разрешение с диапазоном 1000–6000 м, 100 кГц дает среднее разрешение на расстоянии 500–1000 м, 300 кГц дает высокое разрешение на расстоянии 150–500 м, а 600 кГц дает высокое разрешение на расстоянии 75–150 м. На гидролокаторы дальнего действия более неблагоприятно влияют неоднородности воды. Некоторые места, как правило, мелководье у побережья, имеют сложный рельеф со многими особенностями; там становятся необходимы более высокие частоты.[80]
Смотрите также
- Акустический доплеровский профилограф тока - Гидроакустический измеритель течения, используемый для измерения скорости течения воды в диапазоне глубин с использованием эффекта Доплера.
- Акустическая локация
- Акустическая метка - Устройство, позволяющее обнаруживать и отслеживать животных
- Перегородки (подводная лодка) - Зоны позади подводной лодки или корабля, где гидролокатор не слышит
- Бистатический сонар
- Китообразных - Явление, при котором кит застревает на пляже, что часто приводит к его гибели.
- Гидролокатор обнаружения водолаза - Системы акустической локации для обнаружения водолазов и подводных средств доставки пловцов
- Эхо - Измерение глубины воды путем передачи звуковых волн в воду и определения времени возврата
- Эхолот
- Цирконат титанат свинца или PZT, пьезоэлектрический материал, используемый для ультразвуковых преобразователей.
- Гордон Юджин Мартин, физик-гидролокатор
- Акустическая томография океана - Метод, используемый для измерения температуры и течений на больших участках океана.
- Пассивный радар
- Радар - Система обнаружения объектов с использованием радиоволн
- Отражательная сейсмология - Исследуйте свойства недр с помощью сейсмологии
- Научный эхолот - Устройство, использующее гидроакустическую технологию для измерения физических и биологических компонентов под водой
- Гидролокатор бокового обзора
- ГНФАР канал - Горизонтальный слой воды в океане, на глубине которого скорость звука минимальна.
- Подводная навигация
- Эхолот с синтетической апертурой
- Тонпилз
- Гидролокатор с буксируемой антенной решеткой
- Подводная акустика - Изучение распространения звука в воде и взаимодействия звуковых волн с водой и ее границами
- Гидролокатор, направленный вверх
Примечания
- ^ Halvorsen et al. (2013) пришли к выводу, что наблюдаемые эффекты были «обычно небольшими, даже если рыба находилась рядом с эхолотом и оставалась там на протяжении трех тестовых сигналов».
Цитаты
- ^ Юрген Ровер; Михаил Монаков; Михаил Сергеевич Монаков (2001). Сталинский океанский флот: военно-морская стратегия и программы кораблестроения СССР, 1935–1953 гг.. Психология Press. п. 264. ISBN 9780714648958.
- ^ а б c "Сонар". Британская энциклопедия. Получено 18 января 2019.
- ^ Дэвид Рибас; Пере Ридао; Хосе Нейра (26 июля 2010 г.). Подводный SLAM для структурированных сред с использованием сонара изображений. Springer Science & Business Media. ISBN 978-3-642-14039-6.
- ^ а б Фахи, Франк (1998). Основы шума и вибрации. Джон Джерард Уокер. Тейлор и Фрэнсис. п. 375. ISBN 978-0-419-24180-5.
- ^ Томас Соседи, Дэвид Брэдли (редактор), Прикладная подводная акустика: Лейф Бьёрнё , Эльзевир, 2017 ISBN 0128112476, стр. 8
- ^ М. А. Эйнсли (2010), Принципы моделирования характеристик сонара, Springer, стр. 10
- ^ а б Хилл, М. Н. (1962). Физическая океанография. Аллан Р. Робинсон. Издательство Гарвардского университета. п. 498.
- ^ В. Хакманн (1984), Seek and Strike, pn
- ^ Зейтц, Фредерик (1999). Изобретатель космоса: Реджинальд Обри Фессенден (1866–1932).. 89. Американское философское общество. С. 41–46. ISBN 978-0-87169-896-4.
- ^ Хендрик, Бертон Дж. (Август 1914 г.). «Беспроводная связь под водой: замечательное устройство, которое позволяет капитану одного из кораблей определять точное местоположение другого корабля даже в самом густом тумане». Мировая работа: история нашего времени. XLIV (2): 431–434. Получено 2009-08-04.
- ^ «Отчет капитана Дж. Х. Квинана из США в Майами о методе эхолокации для обнаружения айсбергов и проведения непрерывных зондирований». Бюллетень гидрографического управления. 1914-05-13. (цитируется в стенограмма NOAA, сделанная сотрудниками Центральной библиотеки, апрель 2002 г. В архиве 2010-05-10 на Wayback Machine.
- ^ «Роторный колпак». В архиве из оригинала от 26.06.2007.
- ^ «Военно-морской словарь Второй мировой войны». Военный корабль США "Аббат" (DD-629). 8 ноября 2019. В архиве из оригинала 20 февраля 2014 г.. Получено 12 ноября 2019.
- ^ W. Hackmann, Seek & Strike: Sonar, противолодочная война и Королевский флот 1914–54 (HMSO, Лондон, 1984).
- ^ Берн, Алан (1993). «Приложение 6». Боевой капитан: Фредерик Джон Уокер Р.Н. и Битва за Атлантику (2006, изд. Kindle). Барнсли: Перо и меч. ISBN 978-1-84415-439-5.
- ^ Howeth: Глава XXXIX. Вашингтон. 1963 г.
- ^ "Устная история AIP: Фредерик Винтон Хант, часть II".
- ^ из автобиографического очерка доктора Хортона и Центра подводных боевых действий Министерства военно-морского флота США
- ^ Хортон, Дж. Уоррен (1957). Основы сонара. Военно-морской институт США, Аннаполис, Мэриленд. п. 387.
- ^ Фрэнк Масса. Гидролокаторы: история В архиве 2015-04-18 на Wayback Machine
- ^ а б «Японский сонар и асдик» (PDF). Архивировано из оригинал (PDF) на 2015-09-24. Получено 2015-05-08.
- ^ Шерман, Чарльз Х; Батлер, Джон Л; Браун, Дэвид А (2008). Преобразователи и массивы для подводного звука. Журнал акустического общества Америки. 124. п. 1385. Bibcode:2008ASAJ..124.1385S. Дои:10.1121/1.2956476. ISBN 9780387331393. В архиве из оригинала от 26.04.2018.
- ^ «Базовая система сонара (активная)». fas.org. В архиве из оригинала 2020-06-22. Получено 2020-06-22.
- ^ Бьёрнё, Лейф (2017). «Гидроакустические системы». Прикладная подводная акустика. Эльзевир. ISBN 978-0-12-811240-3.
- ^ Tucker, D.G .; Газей, Б. (1966). Прикладная подводная акустика. Pergamon Press.
- ^ Министерство торговли США, Национальное управление океанических и атмосферных исследований. "NOAA Ocean Explorer: Технология: Инструменты наблюдения: SONAR". oceanexplorer.noaa.gov. В архиве из оригинала 2020-06-22. Получено 2020-06-22.
- ^ Абрахам, Д.А. (2017). "Обработка сигналов". Прикладная подводная акустика. Эльзевир. ISBN 978-0-12-811240-3.
- ^ МакКлинтон, А. Т. (7 сентября 1967 г.). Краткий отчет об источнике акустики проекта Артемнис (PDF) (Отчет). Вашингтон, округ Колумбия: Лаборатория военно-морских исследований США. п. iv. Получено 19 апреля 2020.
- ^ Эрскин, Фред Т. III (август 2013 г.). История отделения акустики Лаборатории военно-морских исследований. Первые восемь десятилетий 1923–2008 гг. (PDF) (Отчет). Вашингтон, округ Колумбия: Военно-морская исследовательская лаборатория. стр. 59–63. Получено 19 апреля 2020.
- ^ «Легкий ответчик срабатывания (LAT)». Sonardyne. В архиве из оригинала 2020-06-23. Получено 2020-06-23.
- ^ а б ISO 18405: 2017 Подводная акустика - терминология. Уравнение сонара, запись 3.6.2.3
- ^ Коннолли, Уильям (29 мая 2005 г.). "Горностай: Морской лед: Чем я занимаюсь в свободное время :-)". Горностай. Получено 19 октября 2017.
- ^ Fissel, D. B .; Marko, J. R .; Меллинг, Х. (1 января 2008 г.). «Достижения в технологии перспективных гидролокаторов для изучения процессов изменения ледового климата Северного Ледовитого океана». Журнал оперативной океанографии. 1 (1): 9–18. Дои:10.1080 / 1755876X.2008.11081884. ISSN 1755-876X. S2CID 125961523.
- ^ "Синеморское мышление". The Economist: Technology Quarterly. 10 марта 2018. В архиве из оригинала 16.11.2020. Получено 2020-11-16.
- ^ М. А. Эйнсли (2010), Принципы моделирования характеристик сонара, Springer, стр. 68
- ^ Leighton, T.G .; Coles, D.C.H .; Srokosz, M .; White, P.R .; Вульф, Д. (2018). «Асимметричный перенос CO2 через изломанную морскую поверхность». Научные отчеты. 8 (1): 8301. Bibcode:2018НатСР ... 8.8301Л. Дои:10.1038 / s41598-018-25818-6. ЧВК 5974314. PMID 29844316.
- ^ Вульф, Д.К .; Торп, С.А. (1991). «Утечка метана с морского дна вдоль континентальной окраины Западного Шпицбергена». J. Mar. Res. 49 (3): 435–466. Дои:10.1357/002224091784995765.
- ^ а б c Вестбрук, Г.К .; Тэтчер, К.Е .; Rohling, E.J .; Пиотровски, A.M .; Pälike, H .; Osborne, A.H .; Nisbet, E.G .; Minshull, T.A .; Lanoisellé, M .; James, R.H .; Hühnerbach, V .; Green, D .; Fisher, R.E .; Crocker, A.J .; Chabert, A .; Bolton, C .; Beszczynska-Möller, A .; Berndt, C .; Аквилина, А. (2009). «Утечка метана со дна на континентальной окраине Западного Шпицбергена» (PDF). J. Mar. Res. 36 (15): L15608. Bibcode:2009GeoRL..3615608W. Дои:10.1029 / 2009GL039191.
- ^ а б c Leighton, T. G .; Finfer, D.C .; White, P. R .; Чуа, Г. - Х .; Дикс, Дж. К. (2010). «Подавление и классификация помех с использованием сдвоенного гидролокатора с инвертированными импульсами (TWIPS)» (PDF). Труды Королевского общества А. 466 (2124): 3453–3478. Bibcode:2010RSPSA.466.3453L. Дои:10.1098 / rspa.2010.0154. S2CID 111066936.
- ^ Leighton, T. G .; Chua, G.H .; Уайт, П. Р. (2012). «Дельфинам приносит пользу нелинейная математика при обработке сигналов сонара?» (PDF). Труды Королевского общества А. 468 (2147): 3517–3532. Bibcode:2012RSPSA.468.3517L. Дои:10.1098 / rspa.2012.0247. S2CID 109255100.
- ^ Leighton, T. G .; Finfer, D.C .; Chua, G.H .; White, P. R .; Дикс, Дж. К. (2011). «Подавление и классификация помех с использованием сдвоенного гидролокатора с инвертированными импульсами в следе корабля» (PDF). Журнал акустического общества Америки. 130 (5): 3431–7. Bibcode:2011ASAJ..130.3431L. Дои:10.1121/1.3626131. PMID 22088017.
- ^ "Как советская Акула изменила подводную войну". Фокстрот Альфа. Получено 2020-01-15.
- ^ а б Уитмен, Эдвард С. (зима 2005 г.). "СОСУС" Секретное оружие "подводного наблюдения". Подводная война. Vol. 7 нет. 2. Получено 5 января 2020.
- ^ а б c «История интегрированной системы подводного наблюдения (IUSS) 1950 - 2010». Ассоциация выпускников IUSS / CAESAR. Получено 22 мая 2020.
- ^ Либерман, Филипп; Блюмштейн, Шейла Э. (4 февраля 1988 г.). Физиология речи, восприятие речи и акустическая фонетика. Кембридж, Кембриджшир, Великобритания / Нью-Йорк: Издательство Кембриджского университета. С. 51–52. ISBN 0521308666. LCCN 87013187. Получено 22 мая 2020.
- ^ «Истоки СОСУС». Командир, подводное наблюдение. Получено 22 мая 2020.
- ^ Пост, К (2002). «Дайверский гидролокатор с очень высоким разрешением». Отчет в Управление военно-морских исследований. Архивировано из оригинал на 2008-10-08. Получено 2008-08-11.
- ^ Крюгер, Кеннет Л. (2005-05-05). «Карты для дайверов и графический дисплей». Техасский университет в лаборатории прикладных исследований Остина. Архивировано из оригинал на 2009-08-13. Получено 2009-01-21.
- ^ «Фатометр». В архиве из оригинала от 20.10.2013.
- ^ "Исследователь океана NOAA: чтение эхо". В архиве из оригинала от 10.09.2015.
- ^ "Этот костюм дает вам ощущение паука в реальной жизни". Forbes. 23 февраля 2013 г. В архиве из оригинала 27 февраля 2013 г.. Получено 12 марта 2013.
- ^ а б c d Leighton, T.G .; Уайт, П.Р. (2012). «Количественная оценка подводных утечек газа из объектов улавливания и хранения углерода, из трубопроводов и из просачиваний метана по их акустической эмиссии» (PDF). Труды Королевского общества А. 468 (2138): 485–510. Bibcode:2012RSPSA.468..485L. Дои:10.1098 / rspa.2011.0221. S2CID 108841954.
- ^ Blackford, J .; Stahl, H .; Bull, J .; и другие. (28 сентября 2014 г.). «Обнаружение и последствия утечки из глубинных геологических хранилищ углекислого газа на морском дне» (PDF). Природа Изменение климата. 4 (11): Опубликовано в Интернете. Bibcode:2014NatCC ... 4.1011B. Дои:10.1038 / nclimate2381.
- ^ Berges, B.J.P; Leighton, T.G .; Уайт, П.Р. (2015). «Пассивная акустическая количественная оценка потоков газа во время экспериментов с контролируемым выделением газа». Международный журнал по контролю за парниковыми газами. 38: 64–79. Дои:10.1016 / j.ijggc.2015.02.008.
- ^ Hannis, S .; Chadwick, A .; Pearce, J .; и другие. (2015). «Обзор оффшорного мониторинга для проектов CCS» (PDF). Технический отчет IEAGHG 2015-02 (июль 2015 г.): Авторское право 2016 IEAGHG.
- ^ Hannis, S .; Chadwick, A .; Коннелли, Д .; и другие. (2017). «Обзор мониторинга морских хранилищ CO2: опыт эксплуатации и исследований по соблюдению нормативных и технических требований». Энергетические процедуры. 114: 5967–5980. Дои:10.1016 / j.egypro.2017.03.1732.
- ^ Ainslie, M. A .; Лейтон, Т. Г. (2011). «Обзор сечений рассеяния и экстинкции, коэффициентов затухания и резонансных частот сферического газового пузыря» (PDF). Журнал акустического общества Америки. 130 (5): 3184–3208. Bibcode:2011ASAJ..130.3184A. Дои:10.1121/1.3628321. PMID 22087992.
- ^ Хо Берктай, Некоторые эффекты конечной амплитуды в подводной акустике в В. М. Альберсе «Подводная акустика» 1967
- ^ Вестервельт, П. Дж. (1963). Параметрический акустический массив. Журнал акустического общества Америки, 35 (4), 535-537.
- ^ Leighton, T. G .; Петкулеску, А. (1 августа 2016 г.). «Акустические и родственные им волны во внеземных средах» (PDF). Журнал акустического общества Америки. 140 (2): 1397–1399. Bibcode:2016ASAJ..140.1397L. Дои:10.1121/1.4961539. ISSN 0001-4966. PMID 27586765.
- ^ Арвело и Лоренц (2013), J Acoust Soc Am
- ^ Leighton, T. G .; White, P. R .; Финфер, Д. К. (2005). «Звуки морей в космосе» (PDF). Материалы Международной конференции по подводным акустическим измерениям, технологиям и результатам, Ираклион, Крит, 28 июня - 1 июля 2005 г.. II: 833–840.
- ^ Ainslie, M. A .; Лейтон, Т. Г. (2016). «Уравнения сонара для исследования планет» (PDF). Журнал акустического общества Америки. 140 (2): 1400–1419. Bibcode:2016ASAJ..140.1400A. Дои:10.1121/1.4960786. PMID 27586766.
- ^ Leighton, T.G .; Финфер, округ Колумбия; Уайт, П.Р. (2008). «Проблемы с акустикой на маленькой планете» (PDF). Икар. 193 (2): 649–652. Bibcode:2008Icar..193..649L. Дои:10.1016 / j.icarus.2007.10.008.
- ^ Цзян, Дж; Байк, К; Лейтон, Т. (2011). «Акустическое затухание, фазовые и групповые скорости в трубах, заполненных жидкостью II: моделирование для источников нейтронов расщепления и исследования планет» (PDF). Журнал акустического общества Америки. 130 (2): 695–706. Bibcode:2011ASAJ..130..695J. Дои:10.1121/1.3598463. PMID 21877784.
- ^ Лейтон, Т. (2009). «Эффекты жидкостной нагрузки для акустических датчиков в атмосферах Марса, Венеры, Титана и Юпитера» (PDF). Журнал акустического общества Америки. 125 (5): EL214–9. Bibcode:2009ASAJ..125L.214L. Дои:10.1121/1.3104628. PMID 19425625.
- ^ Ainslie, M. A .; Лейтон, Т. Г. (2009). «Поправки акустического поперечного сечения около резонансного пузырька, включая примеры из океанографии, вулканологии и биомедицинского ультразвука» (PDF). Журнал акустического общества Америки. 126 (5): 2163–75. Bibcode:2009ASAJ..126.2163A. Дои:10.1121/1.3180130. PMID 19894796.
- ^ Leighton, T.G .; White, P.R .; Финфер, округ Колумбия (2012). «Возможности и проблемы использования внеземной акустики при исследовании океанов ледяных планетных тел» (PDF). Земля, Луна и планеты. 109 (1–4): 99–116. Bibcode:2012EM & P..109 ... 91L. Дои:10.1007 / s11038-012-9399-6. S2CID 120569869.
- ^ а б Дамиан Кэррингтон (3 июля 2013 г.). «Киты бегут от военного гидролокатора, что приводит к массовым выбросам на берег, как показывают исследования». Хранитель. В архиве из оригинала на 1 октября 2017 г.
- ^ Стейси Л. ДеРуйтер; Брэндон Л. Саутхолл; Джон Каламбокидис; Уолтер М. Х. Циммер; Динара Садыкова; Эрин А. Фальконе; Ари С. Фридлендер; Джон Э. Джозеф; Дэвид Моретти; Грегори С. Шорр; Лен Томас; Питер Л. Тайак (2013). «Первые прямые измерения поведенческих реакций клювовидных китов Кювье на среднечастотный активный сонар». Письма о биологии. 9 (4): 20130223. Дои:10.1098 / rsbl.2013.0223. ЧВК 3730631. PMID 23825085.
- ^ Goldbogen J. A .; Саутхолл Б. Л .; Deruiter S.L .; Calambokidis J .; Фридлендер А. С .; Hazen E.L .; Falcone E. A .; Schorr G. S .; Дуглас А .; Моретти Д. Дж .; Кибург C .; McKenna M. F .; Tyack P. L. (3 июля 2013 г.). «Синие киты реагируют на моделирование среднечастотного военного гидролокатора». Труды Королевского общества B. 280 (765): 20130657. Дои:10.1098 / rspb.2013.0657. ЧВК 3712439. PMID 23825206.
- ^ Jepson P. D .; Deaville R .; Acevedo-Whitehouse K .; и другие. (30 апреля 2013 г.). «Что стало причиной крупнейшего в Великобритании массового высадки дельфинов (Delphinus delphis) на берег?». PLOS ONE. 8 (4): e60953. Bibcode:2013PLoSO ... 860953J. Дои:10.1371 / journal.pone.0060953. ЧВК 3640001. PMID 23646103.
- ^ Зима против Совета по защите национальных ресурсов В архиве 2017-12-09 в Wayback Machine № 07–1239., Октябрьский семестр 2008 г.
- ^ Goldbogen J. A .; Саутхолл Б. Л .; Deruiter S.L .; Calambokidis J .; Фридлендер А. С .; Hazen E.L .; Falcone E. A .; Schorr G. S .; Дуглас А .; Моретти Д. Дж .; Кибург C .; McKenna M. F .; Tyack P. L. (3 июля 2013 г.). «Синие киты реагируют на моделирование среднечастотного военного гидролокатора». Труды Королевского общества B. 280 (765): 20130657. Дои:10.1098 / rspb.2013.0657. ЧВК 3712439. PMID 23825206.
- ^ Бернальдо де Кирос Y; Фернандес А; Бэрд RW; и другие. (30 января 2019 г.). «Достижения в исследованиях воздействия противолодочного гидролокатора на клювых китов». Труды Королевского общества B. 286 (1895): 20182533. Дои:10.1098 / rspb.2018.2533. ЧВК 6364578. PMID 30963955.
- ^ Бэтчелор, Том (30 января 2019). «Ученые требуют запрета военных гидролокаторов, чтобы положить конец массовым выбросам китов». Независимый.
- ^ Поппер А. Н .; Halvorsen M. B .; Kane A .; Miller D. L .; Smith M. E .; Песня J .; Высоцкий Л. Э. (2007). «Воздействие высокоинтенсивного низкочастотного активного сонара на радужную форель». Журнал акустического общества Америки. 122 (1): 623–635. Bibcode:2007ASAJ..122..623P. Дои:10.1121/1.2735115. PMID 17614519.
- ^ Halvorsen M. B .; Зедди Д. Г .; Chicoine D .; Поппер А. Н. (2013). «Влияние воздействия низкочастотного морского гидролокатора на три вида рыб». Журнал акустического общества Америки. 134 (2): EL205 – EL210. Bibcode:2013ASAJ..134L.205H. Дои:10.1121/1.4812818. PMID 23927226.
- ^ Сёрейде, Фредрик (28 апреля 2011 г.). Корабли из глубин. ISBN 9781603442183. В архиве из оригинала от 26.04.2018.
Библиография
- Дринг, Томас Р. (март 2018 г.). «Крутая кривая обучения: влияние гидроакустических технологий, обучения и тактики на первые годы противолодочной войны ВМС США во Второй мировой войне». Военный корабль Интернэшнл. LV (Январь 2018 г.): 37–57. ISSN 0043-0374.
- Хакманн, Виллем. Seek & Strike: сонар, противолодочная война и Королевский флот 1914–54. Лондон: Канцелярские товары Ее Величества, 1984. ISBN 0-11-290423-8
- Хакманн, Виллем Д. "Гидролокаторные исследования и военно-морская война 1914–1954 гг.: Пример науки двадцатого века". Исторические исследования в физических и биологических науках 16#1 (1986) 83–110.
- Урик, Р. Дж. Принципы подводного звука, 3-е изд. (Peninsula Publishing, Los Altos, 1983).
Справочные материалы по рыбной акустике
- Акустические исследования рыболовства (FAR) в Вашингтонском университете http://www.acoustics.washington.edu/
- Протоколы NOAA для акустических съемок рыболовства https://web.archive.org/web/20060718014532/http://www.st.nmfs.gov/st4/protocol/Acoustic_protocols.pdf
- Акустика без упаковки —Отличный справочник по пресноводной гидроакустике для оценки ресурсов.
- «АКУСТИКА В РЫБОЛОВСТВЕ И ВОДНАЯ ЭКОЛОГИЯ» https://web.archive.org/web/20060514165318/http://www.ifremer.fr/sympafae/
- «Гидроакустический протокол - озера, водохранилища и низинные реки» (для оценки рыбы) https://web.archive.org/web/20060721124918/http://www.pnamp.org/web/workgroups/FPM/meetings/2005_1205/2005_1202Hydroacoustics-Lakes.doc
- Симмондс, Э. Джон и Д. Н. МакЛеннан. Акустика рыболовства: теория и практика, второе издание. Серия «Рыба и водные ресурсы», 10. Oxford: Blackwell Science, 2003. ISBN 978-0-632-05994-2.
дальнейшее чтение
- Канада: стабильная акустика, Журнал Тайм, 28 октября 1946 г. Интересный отчет о 4800 гидроакустических устройствах ASDIC, тайно изготовленных на Casa Loma, Торонто, во время Второй мировой войны. Проверено 25 сентября 2009 года.
- «Радар глубин - СОНАР», ноябрь 1945 г., Популярная наука одна из лучших статей на эту тему
внешняя ссылка
- Гидролокаторы и морская среда Норвежским институтом оборонных исследований (FFI)
- Однолучевые сонары

| Картины | |
|---|---|
| Потерянные картины | |
| Фрески | |
| Скульптуры |
|
| Работает на бумаге | |
| Рукописи | |
| Другие проекты | |
| Леонардески | |
| Музеи | |
| Связанный | |
| |